多体动力学方法建立含间隙铰关节机构动力学方程,理论方程MATLAB数值计算编程+ADAMS仿真...
·
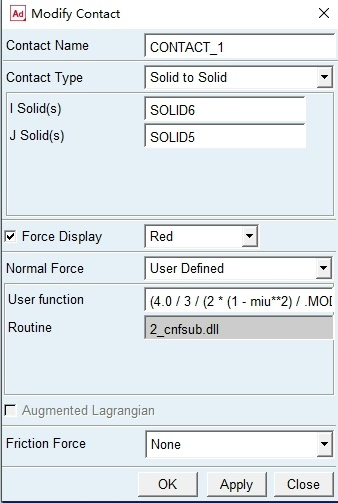
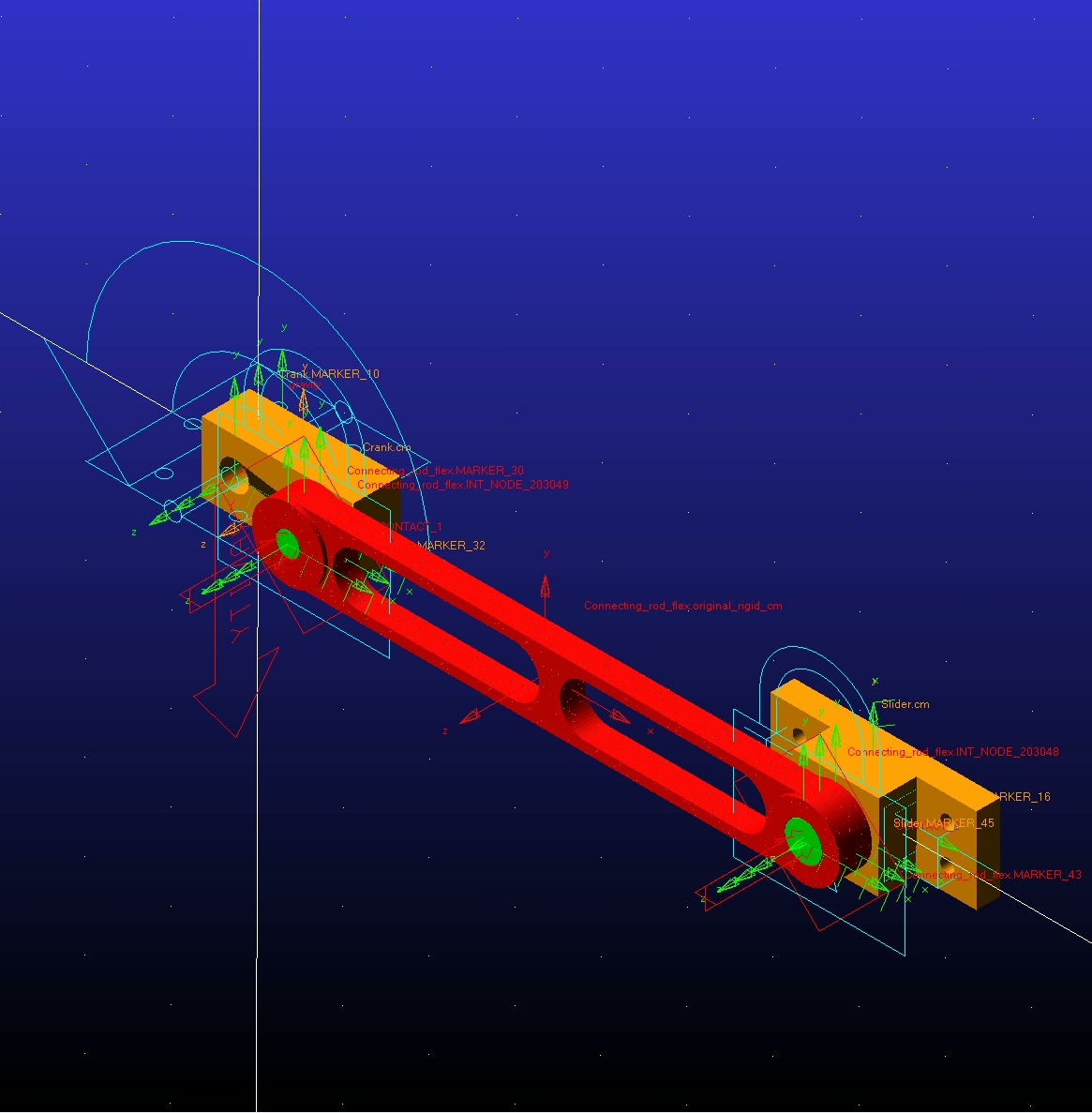
多体动力学方法建立含间隙铰关节机构动力学方程,理论方程MATLAB数值计算编程+ADAMS仿真分析(可嵌入自编接触力模型,.dll文件动态链接库生成方法视频)adams的不是仿真模型,matlab程序一套,Adams自定义接触力函数关联adams仿真方法视频一个 这套模型很难调收敛性价比高
曲柄滑块机构的多体动力学仿真系统,支持含间隙铰链的接触力模型和摩擦模型。系统采用Newmark-β方法进行数值积分,适用于求解刚体系统的动力学响应。以下是各文件的功能分析:
📁 文件结构与功能概览
| 文件名 | 主要功能 |
|---|---|
Cd.m |
计算摩擦系数随相对速度变化的函数 |
CrankSliderNewmark.m |
主程序:曲柄滑块机构的动力学仿真,包含两种模型(无间隙 vs 有间隙) |
acc_lam.m |
计算系统的加速度和拉格朗日乘子 |
forcemodel.m |
计算含间隙铰链的接触力和摩擦力 |
get_jacobian.m |
构建系统 Jacobian 矩阵,用于 Newton-Raphson 迭代 |
get_residual.m |
构建系统残差向量,用于 Newton-Raphson 迭代 |
🔍 各模块详细功能分析
1. `Cd.m`
- 功能:计算库伦摩擦系数随切向速度变化的函数
- 输入:切向速度
vt - 输出:摩擦系数
C,取值范围 [0,1] - 特点:使用全局变量
vs(静摩擦临界速度)和vd(动摩擦临界速度)
2. `Crank_Slider_Newmark.m`
- 主程序,实现两种仿真对比:
- 无间隙模型:使用
acc_lam.m计算约束系统的加速度 - 有间隙模型:使用
forcemodel.m计算接触力,并采用隐式积分求解 - 核心方法:
- Newmark-β 时间积分
- Newton-Raphson 迭代求解非线性系统
- 输出:
- 位置、速度、加速度时间历程
- 拉格朗日乘子
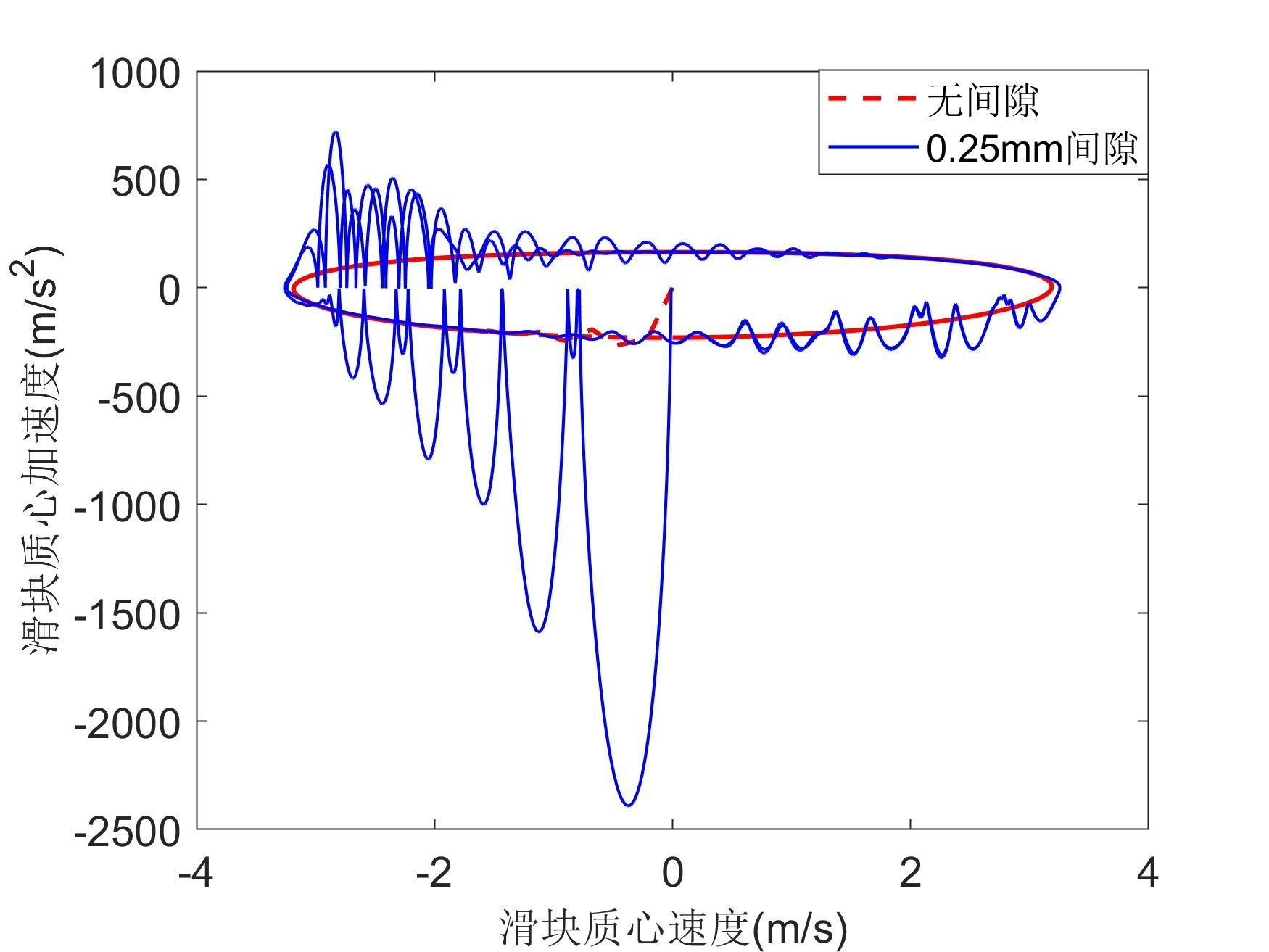
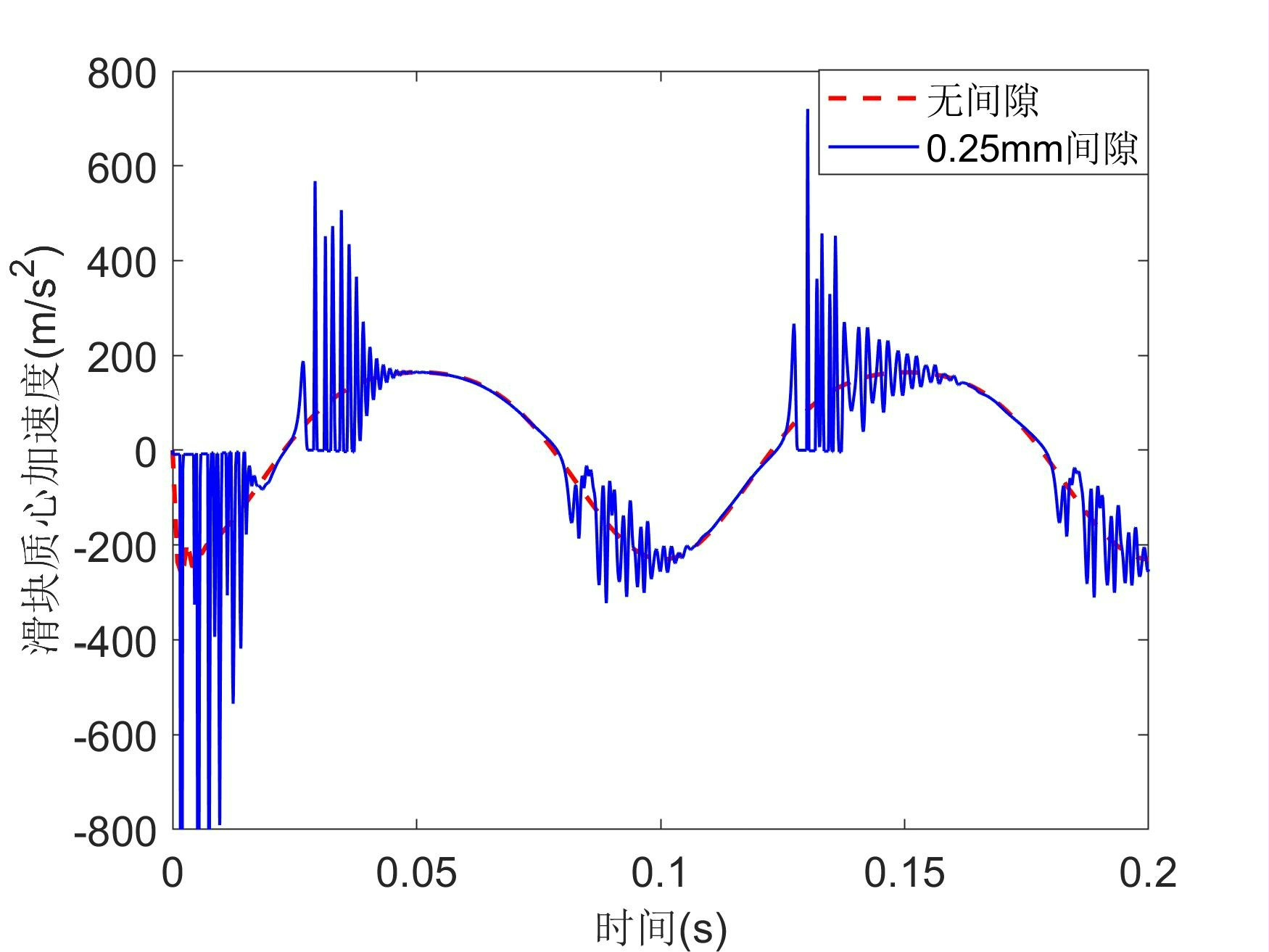
- 绘制连杆质心加速度对比图
3. `acc_lam.m`
- 功能:求解完整约束系统的加速度和拉格朗日乘子
- 方法:构建系数矩阵并求解线性系统:
\[
\begin{bmatrix}
M & \Phiq^T \\
\Phiq & 0
\end{bmatrix}
\begin{bmatrix}
a \\ \lambda
\end{bmatrix}
=
\begin{bmatrix}
Q \\ \gamma
\end{bmatrix}
\] - 输出:加速度
acc和拉格朗日乘子lam
4. `forcemodel.m`
- 功能:计算含间隙铰链的接触力和摩擦力
- 模型:
- 法向接触力:基于 Hertz 接触理论,含非线性刚度和阻尼
- 切向摩擦力:基于库伦摩擦模型,使用
Cd.m计算速度相关摩擦系数 - 输出:广义力向量
F,包含力和力矩
5. `get_jacobian.m`
- 功能:构建 Newton-Raphson 迭代所需的 Jacobian 矩阵
- 结构:包含质量矩阵、约束雅可比矩阵及其转置,以及由 Newmark 参数引入的附加项
6. `get_residual.m`
- 功能:构建 Newton-Raphson 迭代所需的残差向量
- 组成:
- 运动方程残差:\( M a + \Phi_q^T \lambda - Q \)
- 约束方程残差:\( \Phi(q, t) \)
🧩 系统建模特点
- 多体系统:包含曲柄、连杆、滑块三个刚体
- 约束类型:
- 完整约束(几何约束)
- 非完整约束(速度约束)
- 接触模型:
- 间隙铰链采用 Hertz 接触模型
- 含能量恢复系数和阻尼
- 摩擦模型:
- 静摩擦-动摩擦过渡
- 速度相关摩擦系数
🧮 数值方法
- 积分方法:Newmark-β 法(隐式)
- 非线性求解:Newton-Raphson 迭代
- 收敛控制:基于修正量的范数判断
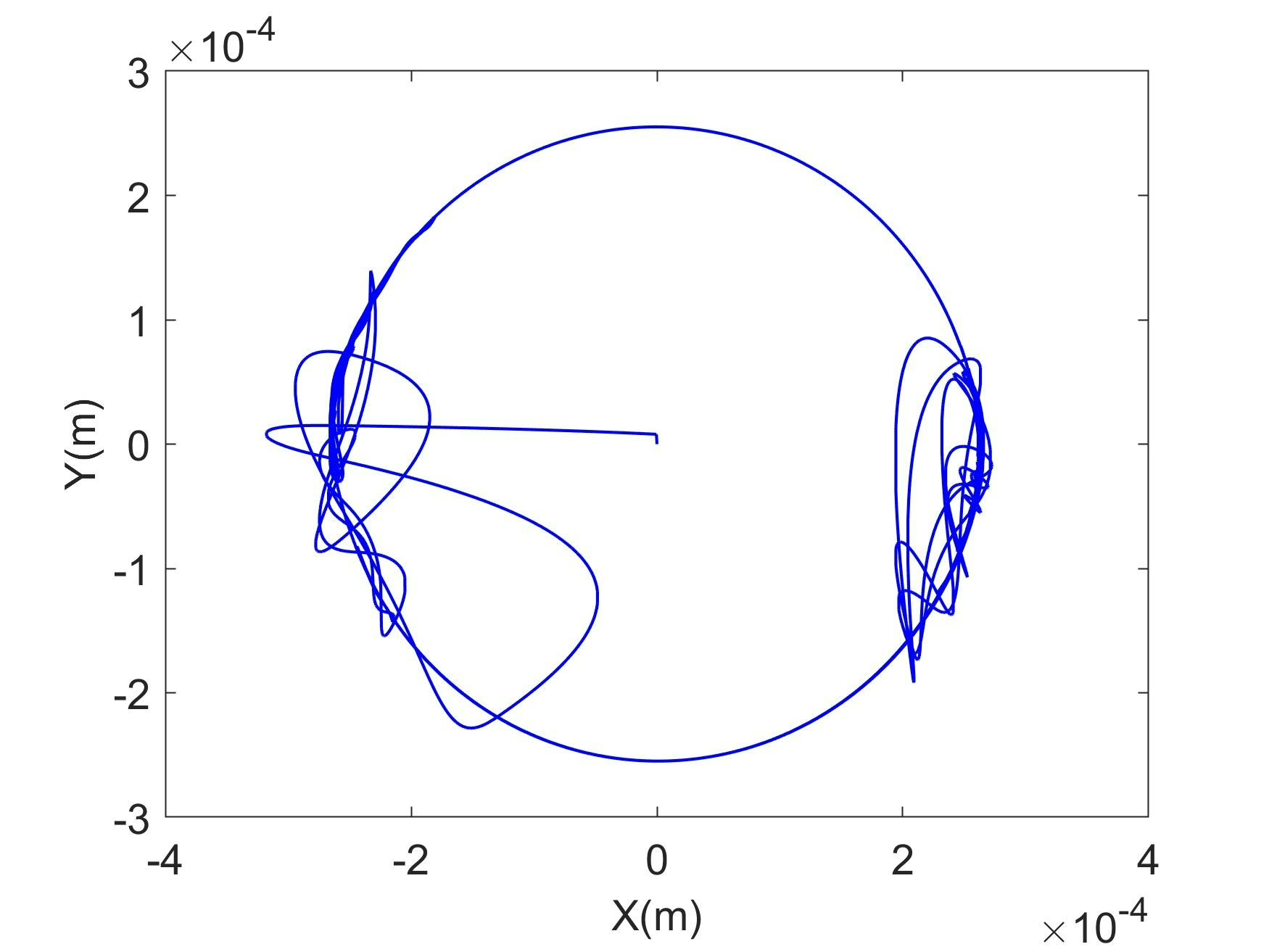
📊 输出与可视化
- 主要输出为连杆质心加速度的时间历程
- 对比无间隙和有间隙两种模型的动态响应
- 可用于分析间隙对系统振动、冲击响应的影响
多体动力学方法建立含间隙铰关节机构动力学方程,理论方程MATLAB数值计算编程+ADAMS仿真分析(可嵌入自编接触力模型,.dll文件动态链接库生成方法视频)adams的不是仿真模型,matlab程序一套,Adams自定义接触力函数关联adams仿真方法视频一个 这套模型很难调收敛性价比高

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)