量产车型BCM_车身控制器Simulink软件模型 [hot]量产车型在用,可用于学习或量产移植。 [闪亮]车门控制 [闪亮]雨刷控制 [闪亮]车窗,后视镜,遮阳板,窗帘控制 [闪亮]防盗报警控制
量产车型BCM|车身控制器Simulink软件模型
[hot]量产车型在用,可用于学习或量产移植。
[闪亮]车门控制
[闪亮]雨刷控制
[闪亮]车窗,后视镜,遮阳板,窗帘控制
[闪亮]防盗报警控制
[闪亮]车灯喇叭控制
[闪亮]网络管理
[闪亮]故障诊断
[闪亮]Immo控制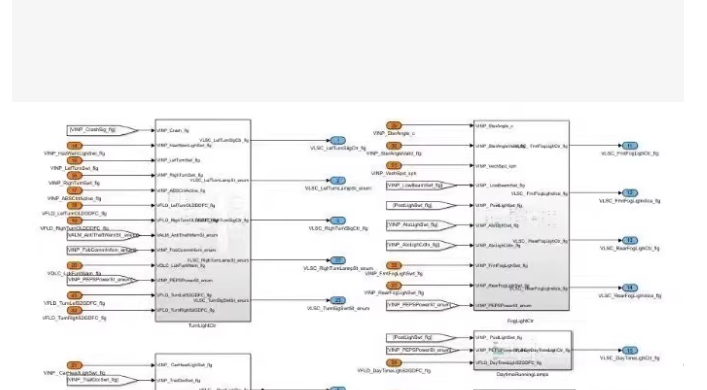
基于Simulink/Stateflow架构的量产级车身控制器(BCM)软件模型框架。该模型采用模块化设计,涵盖了从底层驱动到上层应用逻辑的完整功能链,(如Embedded Coder)并符合AUTOSAR架构规范。
以下是该模型的核心架构描述及关键控制逻辑的伪代码实现。
📦 模型架构概述
该模型采用分层架构设计,确保软件的高内聚低耦合。
软件层级结构
应用层: 包含具体的车身功能策略(如车窗防夹、雨刷间歇控制、防盗逻辑)。
复杂驱动层: 处理特定的时序逻辑或非线性控制(如Immo滚动码算法)。
服务层: 包含网络管理、故障诊断、存储器管理。
基础软件层: 包含MCAL驱动、IO接口、通信协议栈。
🧩 核心功能模块逻辑
车门控制模块
该模块负责处理门锁状态机、中控锁逻辑以及门碰信号的去抖处理。
逻辑描述:
接收来自门把手、钥匙遥控、车速信号。
输出驱动信号至门锁电机。
包含防误锁逻辑(例如:检测到钥匙在车内时禁止落锁)。
Stateflow 状态机逻辑 (伪代码):
/* 车门状态机逻辑 */
switch(Door_Lock_State) {
case STATE_UNLOCKED:
if (Cmd_Signal == CMD_LOCK && Key_In_Car == FALSE) {
Door_Lock_State = STATE_LOCKING;
Actuator_Output = MOTOR_LOCK;
}
break;
case STATE_LOCKED:
if (Cmd_Signal == CMD_UNLOCK) {
Door_Lock_State = STATE_UNLOCKING;
Actuator_Output = MOTOR_UNLOCK;
}
/* 车速感应自动落锁逻辑 */
if (Vehicle_Speed > SPEED_THRESHOLD && Door_Status == CLOSED) {
Door_Lock_State = STATE_LOCKING;
}
break;
case STATE_LOCKING:
/* 等待电机动作完成或超时 */
if (Timer > LOCK_TIMEOUT || Position_Sensor == LOCKED_POS) {
Door_Lock_State = STATE_LOCKED;
Actuator_Output = MOTOR_OFF;
}
break;
default:
Door_Lock_State = STATE_ERROR;
}
车窗与防夹控制
采用基于电流采样的防夹算法或霍尔传感器位置计数。
控制策略:
一键升降: 检测开关的短按与长按脉冲宽度。
防夹: 当电机电流变化率 (frac{dI}{dt}) 超过阈值时,立即反转电机。
Simulink 子系统逻辑:
% 防夹算法核心公式
current_slope = (I_current - I_prev) / Ts;
if (Window_Moving == UP)
if (current_slope > CLAMP_THRESHOLD)
% 触发防夹
Motor_Direction = DOWN;
Reset_Integrator = TRUE;
else
Motor_Driver = PWM_Value;
end
end
雨刷控制
包含间歇刮刷、随速感应及雨量传感器接口。
逻辑实现:
输入: 组合开关信号、雨量传感器模拟值。
输出: 继电器或LIN总线控制信号。
时序逻辑:
/* 雨刷间歇控制 */
if (Wiper_Mode == INTERMITTENT) {
// 根据雨量传感器值动态调整间歇时间
Wiper_Interval = Map_Rain_to_Interval(Rain_Sensor_Value);
if (Timer_Counter >= Wiper_Interval) {
Wiper_Active = TRUE; // 刮刷一次
Timer_Counter = 0;
}
}
防盗报警与Immo控制
涉及安全相关的逻辑,通常包含密钥校验和状态监控。
防盗报警逻辑:
布防: 车门关闭 -> 锁门 -> 30秒倒计时 -> 进入警戒状态。
触发: 检测到门碰信号、震动传感器或非法启动。
Immo (发动机防盗) 握手流程:
/* Immo 状态机 */
switch(Immo_State) {
case STATE_IDLE:
if (Key_Inserted) {
Immo_State = STATE_CHALLENGE;
Send_Challenge_Code();
}
break;
case STATE_CHALLENGE:
if (Receive_Response_Code() == VALID_CODE) {
Immo_State = STATE_AUTHORIZED;
Enable_Engine_Start();
} else {
Immo_State = STATE_LOCKED;
Flash_Immo_Light();
}
break;
case STATE_AUTHORIZED:
if (Key_Removed) Immo_State = STATE_IDLE;
break;
}
网络管理与故障诊断
网络管理: 基于CAN总线的NM协议,协调各节点的睡眠与唤醒。
故障诊断: 实时监控IO状态,记录DTC。
故障监控示例 (开路/短路检测):
/* 外部电路监控 */
if (Feedback_Voltage > OPEN_CIRCUIT_VOLTAGE) {
Set_DTC(DTC_LAMP_OPEN);
Turn_Off_Output(); // 保护电路
}
else if (Feedback_Voltage < SHORT_CIRCUIT_VOLTAGE) {
Set_DTC(DTC_LAMP_SHORT);
Turn_Off_Output();
}
🛡️ 模型特性总结
该Simulink模型具备以下量产特性:
可配置性: 通过MATLAB工作空间变量或.m脚本配置参数(如车窗防夹力阈值、雨刷间歇时间),无需修改模型结构。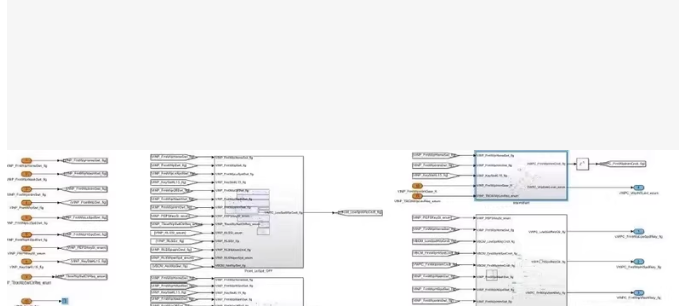
Simulink 模型结构图,包含大量输入输出信号、逻辑处理模块和诊断处理模块,这看起来是一个典型的汽车电子控制单元(ECU)的软件架构
:
输入信号处理 (Inputs): 左侧有很多输入信号,包括开关信号(如 SW_Pushbutton)、传感器信号(如 ADC_Sensor)、通信信号(如 CAN_RX)等。
核心逻辑处理 (Main Logic): 中间部分是核心的逻辑处理模块,可能包括状态机、控制算法等。
诊断处理 (Diagnostics): 右侧有一个明显的 Diagnostic Handler 模块,用于处理故障诊断和错误信号。
输出信号处理 (Outputs): 最右侧是输出信号,驱动执行器(如 Driver_Output)或发送通信信号(如 CAN_TX)。
代
输入信号处理模块 (Input Processing)
这个模块负责读取和处理输入信号,例如按钮开关和传感器信号。
include
// 定义输入信号结构体
typedef struct {
uint8_t pushbutton_state; // 按钮状态
uint16_t sensor_value; // 传感器值
uint8_t can_rx_data; // CAN 接收数据
} InputSignals;
// 输入信号处理函数
void ProcessInputs(InputSignals *inputs) {
// 读取按钮状态 (假设有一个读取函数)
inputs->pushbutton_state = ReadPushButton();
// 读取传感器值 (假设有一个读取函数)
inputs->sensor_value = ReadSensor();
// 读取 CAN 数据 (假设有一个读取函数)
inputs->can_rx_data = ReadCANData();
}
核心逻辑处理模块 (Main Logic)
这个模块包含核心的控制逻辑,例如状态机或控制算法。
include
// 定义状态枚举
typedef enum {
STATE_IDLE,
STATE_ACTIVE,
STATE_ERROR
} SystemState;
// 定义系统状态
SystemState currentState = STATE_IDLE;
// 核心逻辑处理函数
void MainLogic(InputSignals *inputs, OutputSignals *outputs) {
switch (currentState) {
case STATE_IDLE:
// 空闲状态逻辑
if (inputs->pushbutton_state == 1) {
currentState = STATE_ACTIVE;
}
break;
case STATE_ACTIVE:
// 活动状态逻辑
// 根据传感器值和 CAN 数据进行控制
if (inputs->sensor_value > THRESHOLD) {
outputs->driver_output = 1; // 驱动输出
} else {
outputs->driver_output = 0;
}
// 检查错误条件
if (inputs->can_rx_data == ERROR_CODE) {
currentState = STATE_ERROR;
}
break;
case STATE_ERROR:
// 错误状态逻辑
outputs->driver_output = 0; // 停止驱动输出
// 触发诊断处理
HandleDiagnostic(ERROR_OCCURRED);
break;
}
}
诊断处理模块 (Diagnostic Handler)
这个模块负责处理故障诊断和错误信号。
include
// 定义错误代码
define ERROR_OCCURRED 0x01
// 诊断处理函数
void HandleDiagnostic(uint8_t errorCode) {
// 根据错误代码进行处理
switch (errorCode) {
case ERROR_OCCURRED:
// 处理错误发生
// 例如:点亮故障指示灯,记录错误日志
SetFaultIndicator(ON);
LogError(errorCode);
break;
// 其他错误处理...
}
}
输出信号处理模块 (Output Processing)
这个模块负责处理输出信号,例如驱动执行器或发送通信信号。
include
// 定义输出信号结构体
typedef struct {
uint8_t driver_output; // 驱动输出
uint8_t can_tx_data; // CAN 发送数据
} OutputSignals;
// 输出信号处理函数
void ProcessOutputs(OutputSignals *outputs) {
// 驱动输出 (假设有一个驱动函数)
DriveOutput(outputs->driver_output);
// 发送 CAN 数据 (假设有一个发送函数)
SendCANData(outputs->can_tx_data);
}
总结
以上代码示例展示了如何实现一个简单的汽车电子控制单元(ECU)软件架构,包括输入信号处理、核心逻辑处理、诊断处理和输出信号处理。你可以根据你的具体需求和 Simulink 模型结构,对这些代码进行修改和扩展。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献50条内容
已为社区贡献50条内容

所有评论(0)