工厂三维建模怎么做?点云扫描一步到位【天理智能】
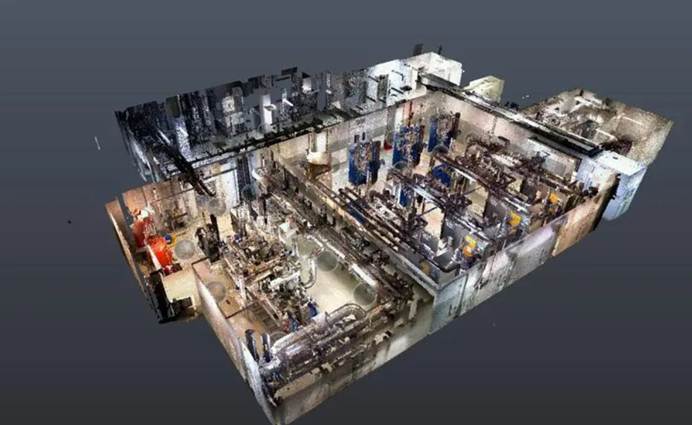
传统工厂3D建模依赖人工测绘+CAD绘制,耗时久、误差大、适配性差,而点云扫描技术能实现工厂三维建模“一步到位”——通过激光扫描复刻真实场景,直接生成高精度三维点云数据,再转化为可复用的3D模型,是当前工厂三维建模最高效、最精准的方式。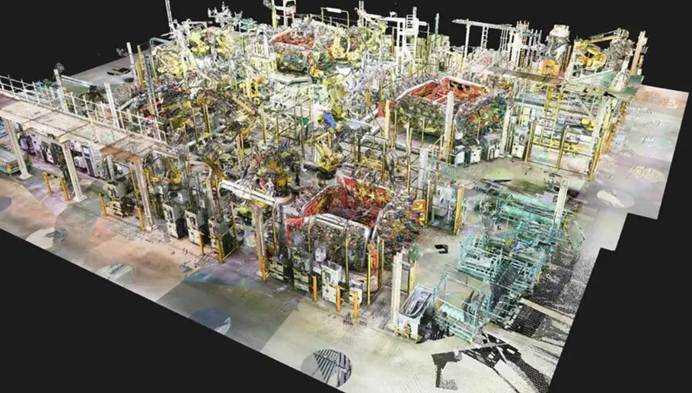
一、为什么点云扫描是工厂三维建模的最优解?
1. 核心优势(对比传统建模)
|
维度 |
传统人工测绘建模 |
点云扫描建模 |
|
精度 |
厘米级误差,复杂结构易出错 |
毫米级精度,1:1还原工厂细节 |
|
效率 |
1000㎡工厂需10-15天 |
1000㎡工厂仅需1-2天扫描+3-5天建模 |
|
完整性 |
易遗漏管路、桥架、设备细节 |
无死角扫描,覆盖所有物理结构 |
|
适配性 |
模型与真实场景易脱节 |
点云数据直接关联物理空间,适配数字孪生/仿真 |
2. 适用场景
- 老厂改造:无原始图纸、结构复杂的老旧工厂建模;
- 数字孪生:高精度工厂数字底座搭建;
- 产线优化:车间/设备布局仿真、碰撞检测;
- 运维管理:工厂三维可视化、远程巡检。
二、点云扫描实现工厂三维建模的完整流程(一步到位)
步骤1:前期准备(扫前规划,避免返工)
- 场景勘测:确定工厂扫描范围(全厂/车间/单条产线),标记遮挡物(货架、临时物料、人员通道);
- 设备选型:
- 大场景(厂房/园区):选用地面式激光扫描仪(如FARO Focus Premium),扫描半径300-500米;
- 精细场景(设备/产线):选用手持激光扫描仪(如EinScan HX),适配狭小空间;
- 布站规划:按“全覆盖、无盲区”原则规划扫描站点,关键区域(设备接口、管路节点)加密布站,确保点云拼接精度。
步骤2:现场点云扫描(核心环节,一步采集)
- 设备校准:对扫描仪进行水平、距离校准,设置扫描精度(工厂建模常用6-12mm分辨率);
- 无死角扫描:
- 按布站顺序扫描,同步采集环境纹理(可选),记录设备铭牌、管路标识等关键信息;
- 扫描过程中放置标靶球/贴标靶纸,用于后续点云拼接;
- 数据初检:每完成一个区域扫描,即时查看点云数据,确认无漏扫、无遮挡,避免二次返工。
步骤3:点云数据处理(去噪+拼接,生成完整点云模型)
- 数据导入:将各站点扫描数据导入处理软件(如FARO Scene、CloudCompare);
- 点云拼接:通过标靶球自动拼接多站点数据,消除拼接误差,生成全厂完整点云模型;
- 去噪精简:删除冗余点、噪声点(如人员、临时物料),保留工厂物理结构点云,同时精简数据量(避免模型过大)。
步骤4:点云转三维模型(从点到面,适配应用场景)
- 分类建模:
- 结构化建模:对厂房墙体、立柱、地面等规则结构,提取轮廓生成参数化模型(CAD/Revit);
- 精细化建模:对设备、管路、桥架等不规则结构,基于点云拟合曲面,生成高精度网格模型(3ds Max/Blender);
- 模型轻量化:简化非核心细节,生成适配数字孪生/仿真的轻量化模型(如glTF、FBX格式);
- 属性挂载:为模型添加设备参数、位置编码、所属区域等信息,关联工厂数据系统。
步骤5:验收与交付(确保可用)
- 精度核验:随机选取关键点位(如设备间距、墙体尺寸),对比实测数据与模型数据,误差需≤5mm;
- 格式交付:按需求交付点云文件(.ply/.las)、三维模型文件(.dwg/.fbx/.obj)、轻量化模型文件。
三、关键注意事项(保障建模效果)
- 扫描时机:避开生产高峰期,减少人员/物料遮挡,优先选择停产间隙扫描;
- 精度把控:核心设备/产线扫描分辨率设为3-6mm,厂房大场景设为12-20mm,平衡精度与数据量;
- 软件适配:数字孪生场景优先用ContextCapture、3D Reshaper,仿真场景优先用Plant Simulation、FlexSim兼容格式;
- 数据安全:点云数据包含工厂核心布局信息,需加密存储,避免泄露。
四、成本与周期参考(2026市场均价)
|
工厂规模 |
扫描周期 |
建模周期 |
整体费用区间 |
|
单车间(500-1000㎡) |
1天 |
3-5天 |
3万-8万 |
|
中小型工厂(1000-5000㎡) |
2-3天 |
5-7天 |
8万-20万 |
|
大型工厂(5000㎡以上) |
3-5天 |
7-15天 |
20万-50万+ |
五、总结
工厂三维建模用点云扫描实现“一步到位”,核心是先通过激光扫描获取毫米级点云数据,再转化为结构化/精细化三维模型,相比传统方式效率提升80%以上、精度提升10倍,是数字孪生、老厂改造、产线优化的核心基础。
若需进一步了解点云扫描设备选型、建模精度控制、模型适配数字孪生场景等实操问题,可结合工厂实际场景交流技术细节,助力工厂三维建模工作精准、高效落地。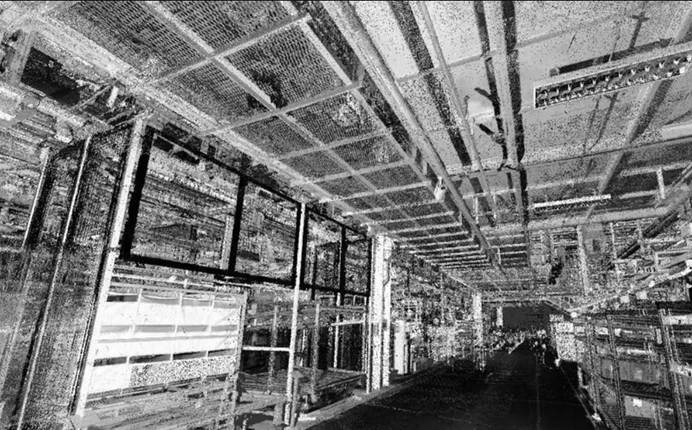

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)