单轮车辆ABS防抱死控制Simulink仿真模型 1.可控制切换冰雪路面和开关ABS系统控制 2.仿真输出时域下的车速/轮速/制动距离/滑移率/控制信号曲线,可以配置车重/滑移率-摩擦系数曲线/主缸
单轮车辆ABS防抱死控制Simulink仿真模型
1.可控制切换冰雪路面和开关ABS系统控制
2.仿真输出时域下的车速/轮速/制动距离/滑移率/控制信号曲线,可以配置车重/滑移率-摩擦系数曲线/主缸压力/制动效能因数等参数。
3.有基础说明文档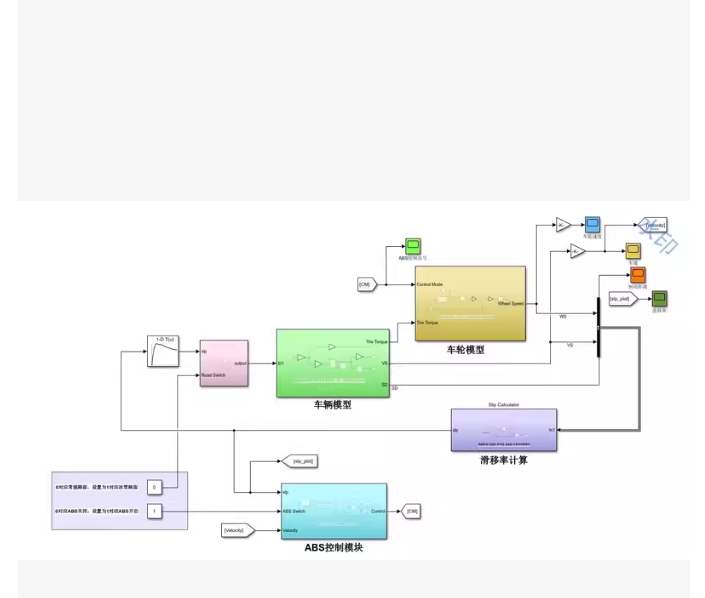
单轮车辆ABS防抱死控制Simulink仿真模型可用于模拟车辆在不同路面(如冰雪路面)下ABS系统开启或关闭时的制动过程,能输出车速、轮速、制动距离、滑移率等参数的时域曲线,还可配置车重、滑移率 - 摩擦系数曲线等参数以研究ABS控制效果。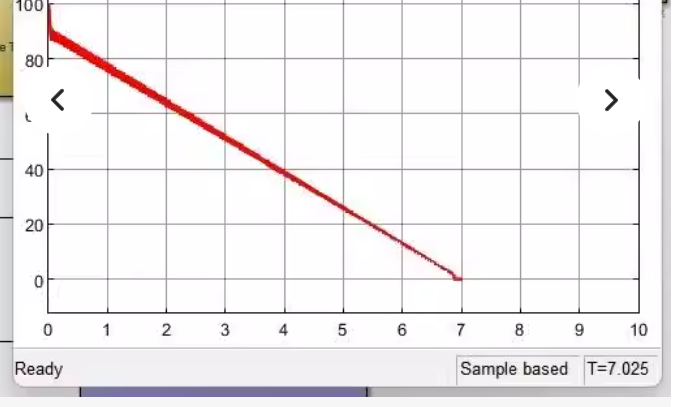
。
绘图代码
% 模拟图中的数据走势
% 起点:t=0, v=90 (目测)
% 终点:t=7.025, v=0 (根据右下角 T=7.025 判断)
t_end = 7.025; % 结束时间
v_start = 90; % 初始速度(估算值)
t = 0:0.01:t_end;
v = - (v_start / t_end) * t + v_start; % 线性减速公式 v = v0 + at
% 绘图设置 (模仿 Simulink Scope 风格)
figure(‘Color’, ‘w’); % 白色背景
plot(t, v, ‘r-’, ‘LineWidth’, 2); % 红色实线,线宽2
% 坐标轴设置
grid on; % 打开网格
ylim([-10 110]); % Y轴范围
xlim([0 10]); % X轴范围 (Scope默认通常显示到10或自动)
% 标签
ylabel(‘Speed (km/h or rad/s)’);
xlabel(‘Time (s)’);
title(‘Simulation Result: Linear Deceleration’);
Simulink 模型代码
% 创建新模型
modelName = ‘SimpleBraking’;
new_system(modelName);
open_system(modelName);
% 1. 添加常数模块 (代表初始速度 90)
add_block(‘simulink/Sources/Constant’, [modelName ‘/Initial Speed’]);
set_param([modelName ‘/Initial Speed’], ‘Value’, ‘90’);
% 2. 添加求和模块 (用于减法)
add_block(‘simulink/Math Operations/Sum’, [modelName ‘/Sum’]);
set_param([modelName ‘/Sum’], ‘IconShape’, ‘rectangular’, ‘Inputs’, ‘±’);
% 3. 添加减速度输入 (斜坡)
add_block(‘simulink/Sources/Ramp’, [modelName ‘/Deceleration’]);
set_param([modelName ‘/Deceleration’], ‘Slope’, ‘12.8’, ‘StartTime’, ‘0’);
% 4. 添加积分器 (计算速度)
add_block(‘simulink/Continuous/Integrator’, [modelName ‘/Integrator’]);
% 5. 添加示波器
add_block(‘simulink/Sinks/Scope’, [modelName ‘/Scope’]);
% — 连线 —
add_line(modelName, ‘Initial Speed/1’, ‘Sum/1’);
add_line(modelName, ‘Deceleration/1’, ‘Sum/2’);
add_line(modelName, ‘Sum/1’, ‘Integrator/1’);
add_line(modelName, ‘Integrator/1’, ‘Scope/1’);
% 运行仿真
set_param(modelName, ‘StopTime’, ‘7.025’);
sim(modelName);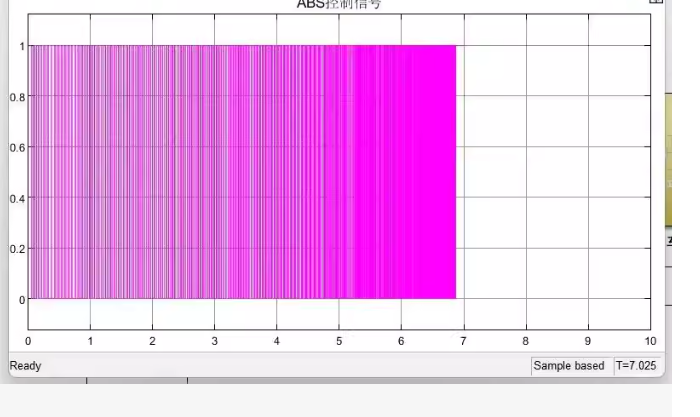
图像分析:
标题:ABS控制信号。
波形特征:这是一组高频的脉冲信号(PWM或逻辑开关信号),在 0 和 1 之间快速跳变。
物理意义:这代表 ABS 系统正在工作。当信号为 1 时,通常表示减压或保压(松开刹车以防止抱死);当信号为 0 时,表示增压(施加刹车)。这种高频震荡是 ABS 典型的“点刹”控制行为。
时间:控制持续到约 7.025 秒,与上一张车速归零的时间点一致。
% 模拟 ABS 控制信号数据
% 时间轴
t_end = 7.025;
t = 0:0.001:t_end; % 高采样率以显示脉冲
% 模拟 ABS 逻辑:
% 假设是一个基于滑移率的开关控制,这里用高频方波模拟其视觉效果
% 实际仿真中,这是由逻辑判断 (if lambda > lambda_opt) 产生的
freq = 20; % 模拟 ABS 动作频率 (Hz)
abs_signal = square(pifreq*t);
abs_signal(abs_signal (lambda_opt + threshold)
% 滑移率过大,轮胎快抱死了 -> 减压 (信号为1)
u = 1;
elseif lambda 增压 (信号为0)
u = 0;
else
% 保持在上一状态 (需要记忆上一时刻状态)
% 在Simulink中通常用 Relay 模块或 Memory 模块实现
u = 1;
end
end
总结: 图中展示的是 ABS 系统在制动全程(0-7秒)内都在进行高频的“保压/减压”循环,以防止车轮抱死。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献100条内容
已为社区贡献100条内容

所有评论(0)