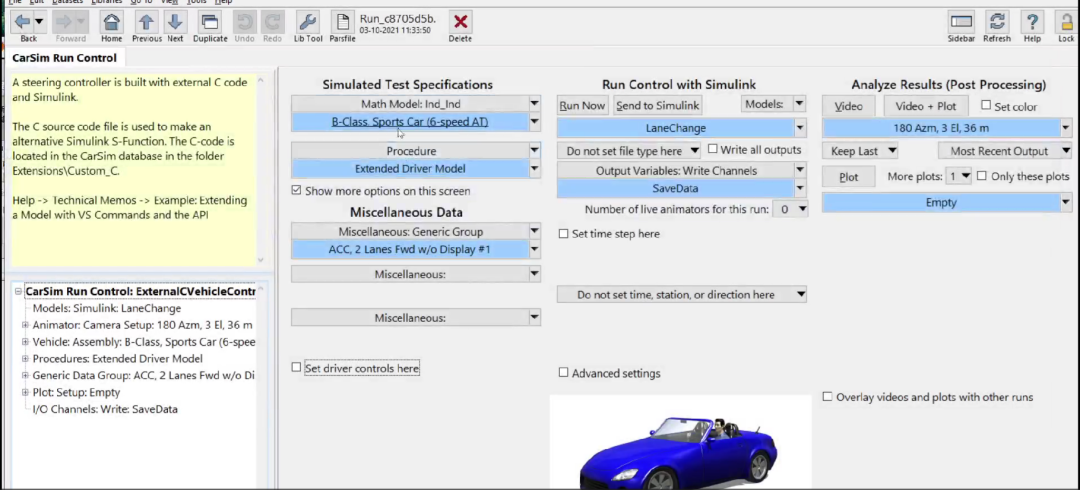
基于模型预测(MPC)车辆换道轨迹规划与轨迹跟踪carsim_Simulink联合仿真模型
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
📖
🔥 内容介绍
一、车辆换道轨迹规划与跟踪的重要性
在智能交通系统和自动驾驶技术中,车辆换道操作是实现高效交通流和安全行驶的关键环节。成功的换道不仅需要精确的轨迹规划,确保车辆平滑地从当前车道过渡到目标车道,还需要可靠的轨迹跟踪控制,使车辆能够准确地按照规划轨迹行驶,避免与周围车辆发生碰撞。这对于提升交通效率、减少交通事故风险具有重要意义。
二、侧向二自由度车辆动力学模型
-
模型概述:侧向二自由度模型是对车辆复杂动力学的简化表示,重点关注车辆的侧向和横摆运动。该模型假设车辆在水平面上的运动主要由质心侧偏角和横摆角速度决定,忽略了一些次要因素,如车辆的垂直运动和轮胎的非线性特性等,以降低模型复杂度,便于实时控制算法的设计与实现。
-
动力学原理:基于牛顿第二定律,该模型建立了车辆在侧向和横摆方向上的动力学方程。在侧向方向,考虑车辆所受的侧向力,包括轮胎侧向力、离心力等,这些力决定了车辆的侧向加速度和质心侧偏角的变化。在横摆方向,车辆的横摆力矩由轮胎侧偏力产生的横摆力矩以及其他外力矩共同作用,从而影响横摆角速度。通过这些方程,能够描述车辆在横向平面内的运动状态变化。
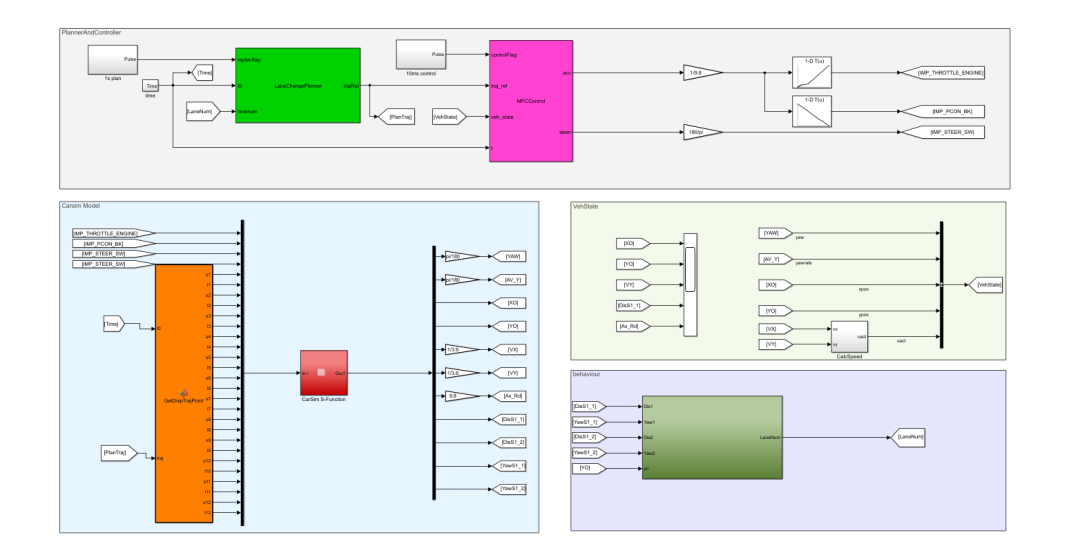
三、模型预测控制(MPC)
-
MPC 基本原理:MPC 是一种基于模型的优化控制策略,它通过预测系统未来的行为,并在每个控制周期内求解一个有限时域的优化问题,来确定当前时刻的最优控制输入。对于车辆换道问题,MPC 利用车辆动力学模型(如侧向二自由度模型)预测车辆在未来多个时间步的状态,包括位置、速度、加速度、横摆角速度等。
-
优化目标与约束:优化目标通常是使车辆实际状态尽可能接近期望换道轨迹,同时考虑控制输入的平滑性和变化率限制,以确保车辆行驶的舒适性和安全性。这可以通过构建包含跟踪误差和控制输入变化量的目标函数来实现,例如,最小化车辆当前位置与期望轨迹位置之间的偏差平方和,以及控制输入(如方向盘转角、油门 / 刹车踏板位置)的变化量平方和。此外,还需考虑车辆动力学和运动学约束,如轮胎力限制、车辆速度限制、转向角度限制等,确保求解出的控制输入在实际车辆能力范围内。
-
滚动时域策略:MPC 采用滚动时域策略,即在每个控制周期,仅将优化得到的第一个控制输入应用于车辆,然后在下一时刻,基于新的车辆状态重新进行预测和优化。这种策略使得 MPC 能够实时适应车辆状态和环境的变化,即使在存在模型误差、外界干扰或轨迹调整的情况下,也能持续保持良好的控制性能。
四、横纵向 MPC 控制集成
-
横纵向控制需求:在车辆换道过程中,横向控制负责调整车辆的侧向位置,使其准确跟踪换道轨迹,而纵向控制则用于控制车辆的速度,确保在换道过程中与前后车辆保持安全距离,同时满足换道的速度要求,如在换道前适当加速以完成超车动作。
-
误差模型集成:将纵向控制误差模型和横向控制误差模型集成到 MPC 框架中,意味着在优化过程中同时考虑横向和纵向的跟踪误差。纵向误差模型关注车辆实际速度与期望速度之间的偏差,期望速度可能根据换道策略和周围交通环境动态调整。横向误差模型则着重于车辆实际侧向位置与期望换道轨迹的偏差。通过在目标函数中合理权衡横向和纵向误差项,以及相应的控制输入变化量项,MPC 能够实现横纵向的协同优化控制,使车辆在换道过程中既满足横向轨迹跟踪精度,又保证纵向速度的合理调整。
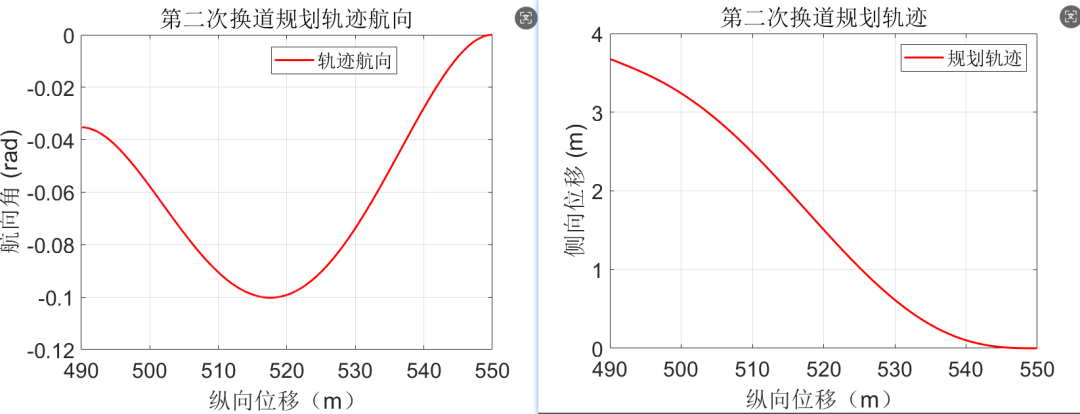
五、5 次多项式拟合换道轨迹
-
多项式拟合优势:5 次多项式具有足够的自由度,可以灵活地描述车辆换道过程中复杂的轨迹变化,包括起始阶段的加速、中间阶段的平滑过渡以及结束阶段的减速和对齐。相比低次多项式,5 次多项式能够更好地拟合实际换道所需的曲线,使车辆换道轨迹更加平滑,减少急加速、急减速和急转弯等情况,提高乘客的舒适性和车辆行驶的安全性。
-
轨迹生成与组合:在程序中,通过生成多段 5 次多项式轨迹,然后将它们组合成一段完整的期望轨迹。每段轨迹可以根据换道过程的不同阶段进行设计,例如,起始段用于使车辆逐渐偏离原车道,中间段用于完成车道间的过渡,结束段用于使车辆稳定进入目标车道。通过合理设置各段轨迹的参数,如起始和结束位置、速度、加速度等,可以确保整个换道轨迹的连续性和光滑性。这种多段组合的方式增加了轨迹生成的灵活性,能够更好地适应不同的换道场景和条件。
六、仿真环境设置
-
双车道道路模型:仿真环境设置为双车道道路,道路方向与 x 轴平行,车道 1 中心线的 y 坐标为 4,车道 2 中心线的 y 坐标为 0。这种设置模拟了常见的道路场景,为车辆换道提供了一个明确的空间框架。通过定义车道中心线的位置,可以清晰地确定车辆的当前车道和目标车道,便于规划换道轨迹和评估轨迹跟踪的准确性。
-
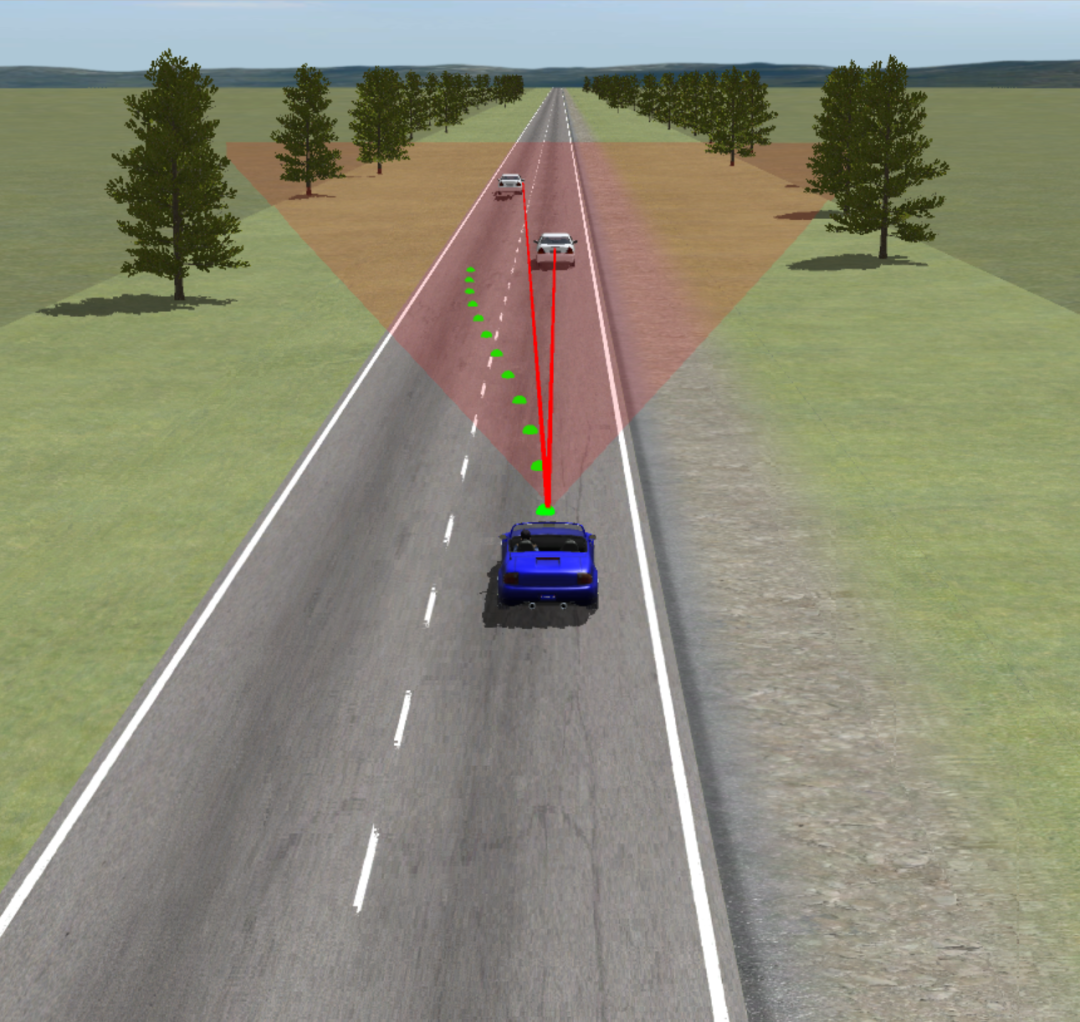
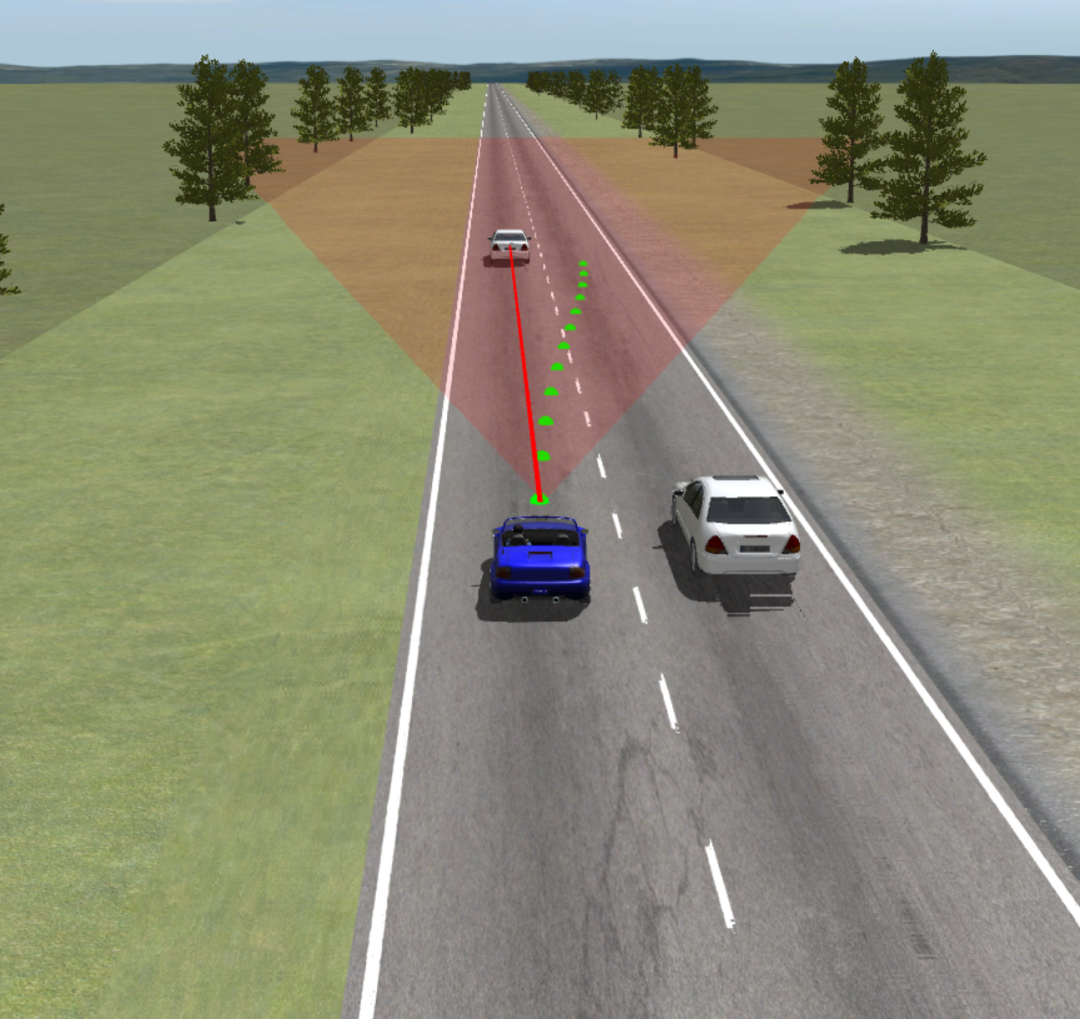
换道超车策略目标:策略目标为换道超车规划与控制,这要求在规划换道轨迹时,不仅要考虑车辆自身的动力学限制和安全行驶要求,还要考虑与周围车辆的相互作用。例如,在换道前需要判断目标车道前方车辆的距离和速度,确保有足够的安全空间完成换道超车动作。同时,在轨迹跟踪过程中,实时调整车辆的横纵向控制输入,以应对可能出现的交通状况变化,如前方车辆突然减速或后方车辆加速接近等。
综上所述,基于模型预测 (MPC) 的车辆换道轨迹规划与轨迹跟踪 carsim_Simulink 联合仿真模型,通过综合运用侧向二自由度车辆动力学模型、横纵向 MPC 控制、5 次多项式拟合换道轨迹以及特定的仿真环境设置,能够有效地模拟和优化车辆在换道超车过程中的行为,为自动驾驶技术的研发和验证提供了有力的工具。
📖
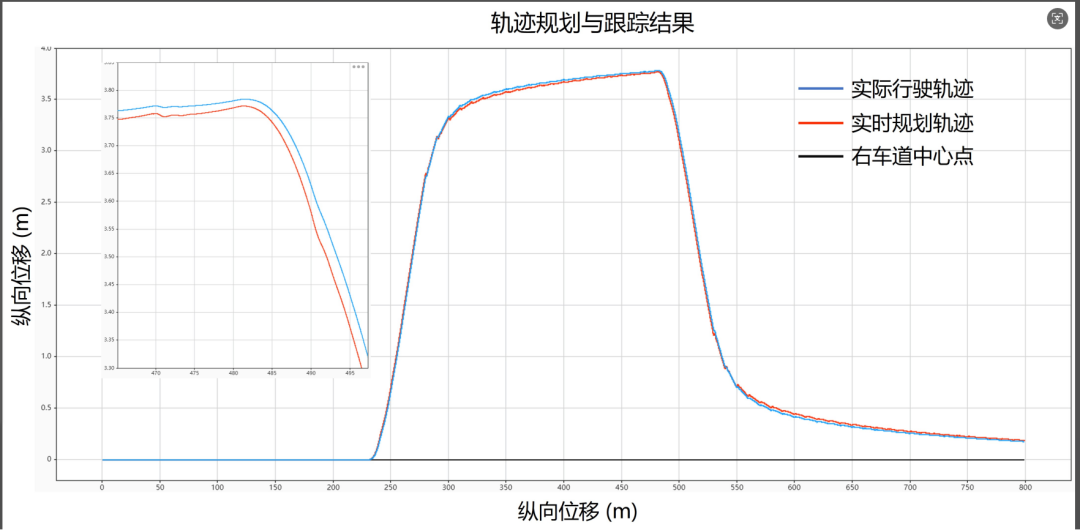
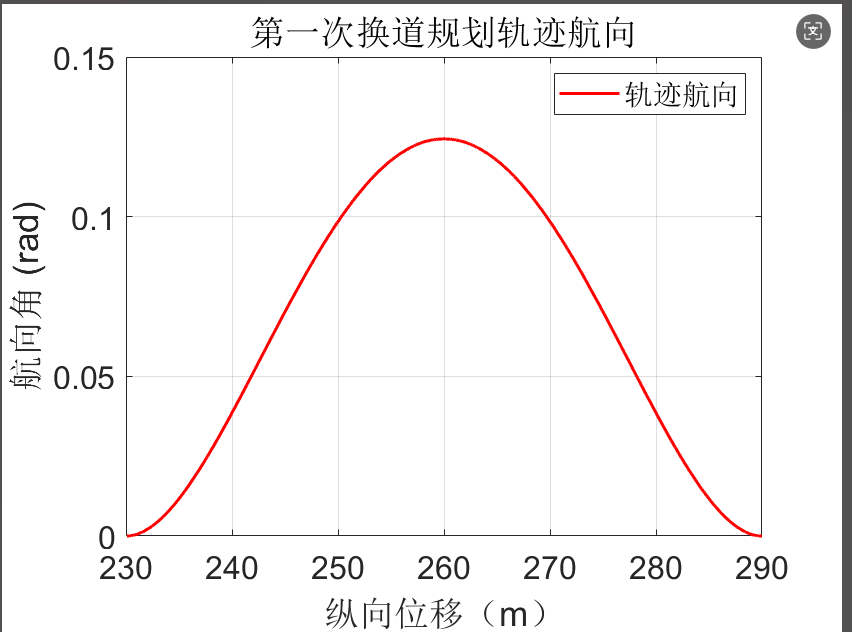
⛳️ 运行结果
📖
📣 部分代码
📖
🔗 参考文献
[1]陆雨.无人驾驶车辆换道轨迹规划与跟踪控制研究[D].东北大学,2021.
📖
🌿 往期回顾可以关注主页,点击搜索

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献98条内容
已为社区贡献98条内容

所有评论(0)