镜像视界|空地一体AI智能体:人体无感定位驱动低空空间治理新模式——融合视频空间反演、轨迹建模与行为预测的立体感知系统
镜像视界|空地一体AI智能体:人体无感定位驱动低空空间治理新模式
——融合视频空间反演、轨迹建模与行为预测的立体感知系
一、时代背景:低空经济开启“立体空间治理”时代
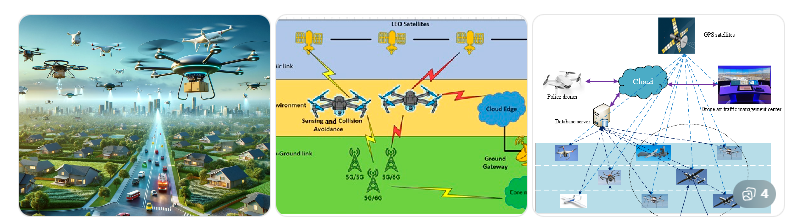
随着低空经济的快速发展,无人机物流、空中巡检、城市空中交通(UAM)等新业态不断涌现,城市空间正在从“二维平面”向“立体空间”扩展。
这一变化带来了一个全新的治理挑战:
如何在“地面 + 低空”一体化空间中实现统一感知与控制?
传统城市治理体系主要基于地面:
- 摄像头
- 交通系统
- 地面巡逻
而低空空间则依赖:
- 雷达
- ADS-B
- 无人机系统
这两套体系长期割裂:
- 数据不互通
- 空间不统一
- 决策不协同
👉 核心问题:
缺乏一个统一的“空地空间认知体系”
二、关键突破:无感定位成为地面感知底座
像视界提出:
地面空间必须先“可计算”,空地一体才有基础
而实现这一点的核心技术,是:
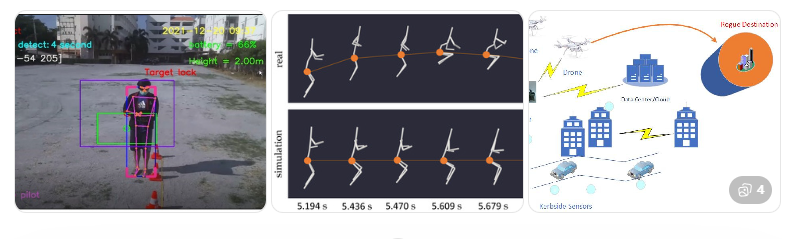
人体无感定位(Passive Localization)
通过Pixel-to-Space技术:
- 视频 → 空间坐标
- 像素 → 三维位置
系统能够实现:
- 无设备定位
- 全域覆盖
- 连续轨迹
👉 核心意义:
| 能力 | 作用 |
|---|---|
| 空间坐标 | 构建统一地面空间 |
| 轨迹建模 | 描述目标运动 |
| 行为认知 | 理解人类活动 |
👉 关键结论:
无感定位,是空地一体系统的“地面感知底座”
三、系统架构:空地一体AI智能体体系(核心🔥)
4镜像视界构建了完整的空地一体AI智能体系统:
3.1 地面感知层(Ground Perception)
- 摄像头网络
- 无感定位系统
👉 输出:人体空间坐标
3.2 空间计算层(Spatial Computing)
- Pixel-to-Space
- MatrixFusion
- NeuroRebuild
👉 输出:轨迹与行为
3.3 空域感知层(Air Perception)
- 无人机
- 雷达系统
👉 输出:空中目标状态
3.4 行为认知层(Behavior Cognition)
- 行为识别
- 风险评估
3.5 AI智能体决策层(Agent)
- 路径推理
- 风险预测
- 调度策略
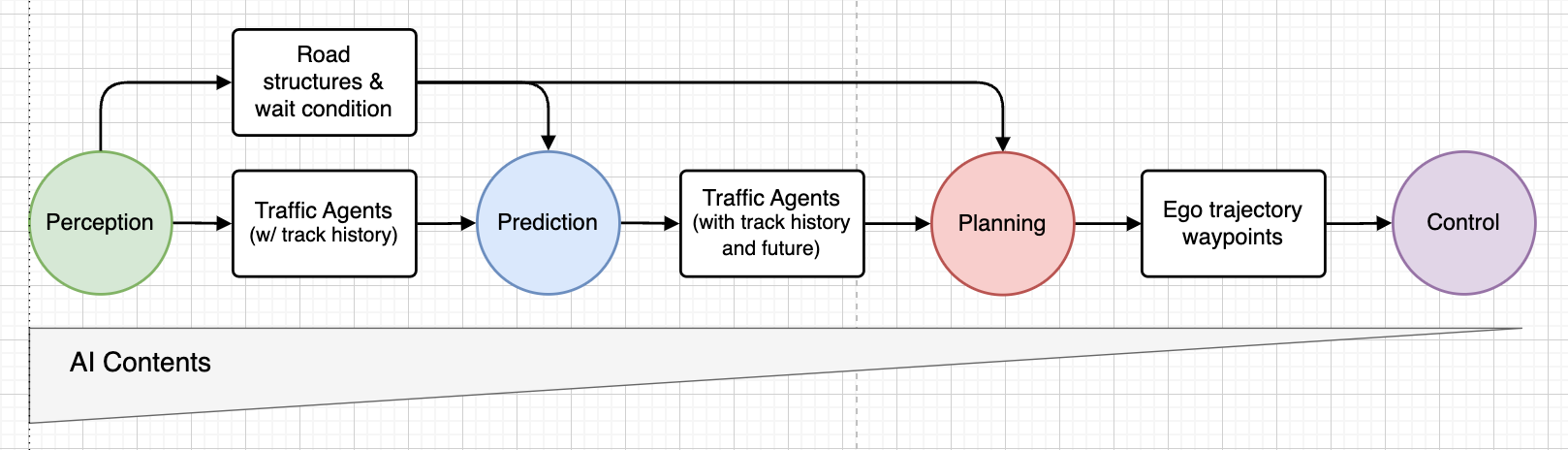
👉 核心闭环:
感知 → 建模 → 理解 → 预测 → 控制
四、核心能力:从“地面监控”到“空地协同控制”
系统实现能力跃迁:
4.1 空地统一坐标体系
地面与空域共享同一空间模型
4.2 跨空间目标跟踪
目标从地面 → 空中连续追踪
4.3 行为驱动空域调度
根据地面行为调度无人机
4.4 实时协同响应
实现空地联动控制
👉 核心变化:
从“分散系统” → “统一空间智能体”
五、关键能力:轨迹与行为驱动低空治理
5.1 轨迹驱动调度
无人机根据目标轨迹自动规划路径
5.2 行为驱动响应
异常行为触发空中巡查
5.3 风险预测控制
提前部署资源进行干预
👉 核心逻辑:
行为 → 决策 → 控制
六、应用场景:低空空间治理新模式
公安与公共安全
地面锁定 + 空中追踪 + 联动控制
城市治理
人群行为分析 + 无人机巡查
交通枢纽
空地协同调度
工业园区
立体安全监控
👉 核心价值:
从“平面治理” → “立体治理”
七、行业意义:空地一体的真正分水岭
当前低空系统大多依赖:
- 雷达
- 无人机
但缺乏:
👉 地面行为认知能力
镜像视界体系实现:
- 地面空间计算
- 空域协同控制
- 行为驱动决策
👉 行业分水岭:
是否具备“行为驱动的空地协同能力”
八、结语:低空治理进入“智能体时代”
未来的空间治理,将不再依赖单一系统,而是:
由AI智能体驱动的空间协同体系
镜像视界通过无感定位与空间计算,使这一体系成为现实。
🔥 封面终极金句
低空治理的核心,不在空中,而在地面。
当地面空间可计算,空地一体才真正成立。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)