AI赋能文献综述:从选题到成文的全流程工作流与免费工具箱(以消费级无人机路径规划为例)
AI赋能文献综述:从选题到成文的全流程工作流与免费工具箱(以消费级无人机路径规划为例)
前言
文献综述是学术研究的“地基”,其核心价值在于厘清领域共识、梳理研究脉络、定位研究空白,为后续研究锚定方向。传统文献综述依赖人工逐篇阅读、手动梳理,耗时耗力且易陷入“只见树木不见森林”的困境。随着AI技术的发展,Consensus、Semantic Scholar、Research Rabbit、NotebookLM、Sourcely等免费工具的出现,重构了文献综述的工作逻辑——从“先读文献再找问题”转向“先定问题再精准找文献”,从“人工梳理”转向“AI辅助+人工校验”,大幅提升效率与质量。
本文以消费级无人机路径规划为具体研究场景,深度拆解AI驱动的文献综述全流程工作流,详解5大核心免费工具的功能、操作与实战用法,结合示例完整呈现从选题共识验证、文献溯源、研究地图构建、批量精读、引用校验到最终成文的全过程,形成一套可直接复用的方法论,帮助研究者少走弯路、高效产出高质量文献综述。
一、文献综述的核心本质与传统痛点
(一)文献综述的核心本质
文献综述并非文献的简单堆砌与摘要罗列,而是围绕特定研究问题,对领域内已有研究进行系统梳理、批判性分析与整合,明确研究现状、共识、争议与空白,为后续研究提供理论与方法支撑的学术写作。其核心目标有三:一是回答“学界关于该问题已有哪些研究”,梳理研究脉络与发展阶段;二是回答“学界对该问题的共识与争议是什么”,提炼核心观点与矛盾点;三是回答“该领域还有哪些未解决的问题”,定位自身研究的创新点与价值。
(二)传统文献综述的三大痛点
1.选题盲目,缺乏共识验证:研究者常凭兴趣或经验选题,未先验证学界对该问题的共识程度,导致研究方向偏离领域主流,或重复已有成熟结论,浪费大量时间。例如研究消费级无人机路径规划时,若未先明确“学界是否认可三维路径规划是核心难点”,可能陷入无意义的研究方向。
2.文献检索低效,源头把控不足:依赖关键词检索易遗漏高被引经典文献,或筛选出大量低价值、非核心文献,无法精准定位领域“地基论文”,导致综述缺乏深度与权威性。
3.梳理与写作困难,易陷入“资料堆砌”:面对海量文献,人工梳理脉络、整合观点难度大,易出现逻辑混乱、缺乏批判性分析的问题;同时AI辅助写作易产生“引用幻觉”,引用不存在的文献或错误标注来源,影响综述可信度。
二、AI驱动的文献综述全流程工作流
本文构建的AI文献综述工作流分为5大核心步骤,每一步对应专属免费工具,形成“问题驱动—文献溯源—地图构建—批量精读—引用校验”的闭环,全程以消费级无人机路径规划为示例,确保方法可落地、可复用。
步骤1:共识验证——用Consensus快速锚定研究问题的学界共识(少走弯路)
1.1 工具核心功能与价值
Consensus是一款基于学术文献的AI问答工具,核心价值在于直接回答研究问题的学界共识:输入具体研究问题,工具会自动检索海量学术文献,统计支持/反对该观点的文献数量、证据强度,生成清晰的共识结论,帮助研究者快速判断选题的学术价值与可行性,避免盲目研究。具体使用教程可以看我的CSDN:https://lzm07.blog.csdn.net/article/details/159799824
1.2 消费级无人机路径规划场景的实战操作
第一步:明确核心研究问题围绕消费级无人机路径规划,提炼3个核心问题(覆盖技术、应用、挑战三大维度):
- 问题 1:消费级无人机路径规划的核心技术难点是什么?
- 问题 2:学界是否认可强化学习算法优于传统图搜索算法用于消费级无人机动态路径规划?
- 问题 3:消费级无人机路径规划在低空复杂环境(如城市楼宇、森林)中的应用瓶颈有哪些?
第二步:Consensus操作流程
(1)访问Consensus官网(https://consensus.app/),无需注册即可免费使用基础功能;
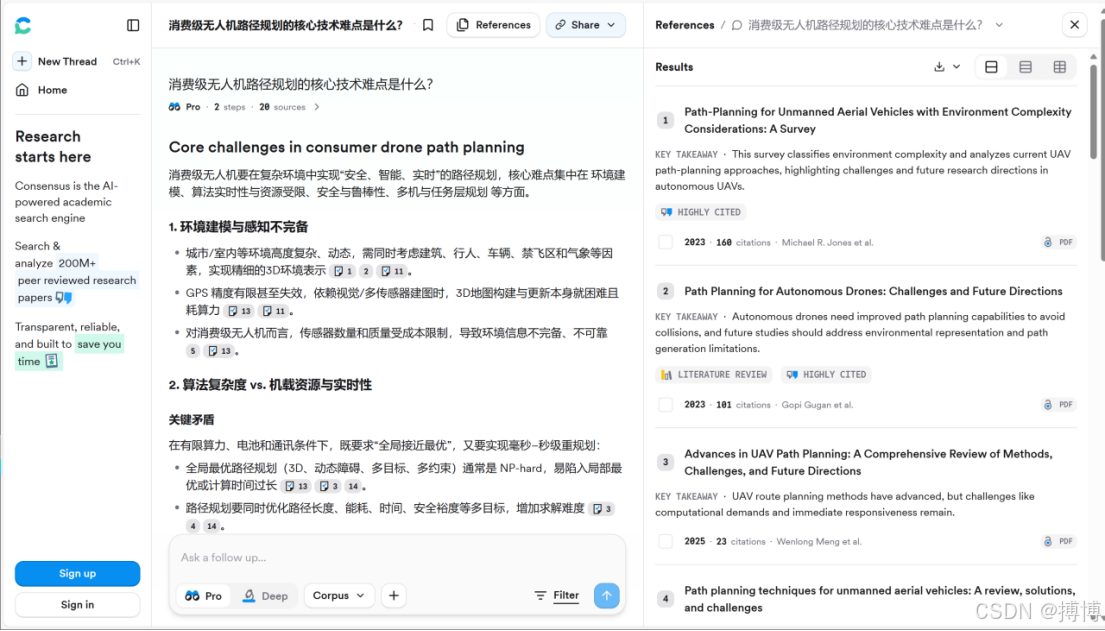
(2)在搜索框输入上述问题,例如输入“消费级无人机路径规划的核心技术难点是什么”(建议转成英文,因为对中文支持不足);
(3)工具自动检索学术文献,生成共识摘要:明确核心难点为“三维空间路径求解复杂度高、动态障碍物实时避障难、机载计算资源有限导致算法效率不足”(每次搜索结果不一定一致);
(4)查看证据详情:显示支持该结论的文献数量(如87篇)、反对文献数量(3篇)、证据强度(极高),并列出代表性文献标题与核心观点;
(5)针对问题2,Consensus会明确:“62%的文献支持强化学习算法在动态场景下更优,31%认为传统算法在静态场景下效率更高,7%无明确结论,证据强度中等”,清晰呈现学界争议。
1.3 共识验证的核心价值
以消费级无人机路径规划为例,通过Consensus可快速明确:
- 领域共识:三维路径规划、动态避障、算法效率是核心研究方向;
- 争议焦点:强化学习与传统算法的适用场景边界;
- 研究空白:低空复杂环境下的轻量化实时路径规划算法研究不足。这一步直接帮研究者避免耗费大量时间的无效探索,精准锁定研究核心。
基于Consensus找到了研究问题的学界共识,那接下来,在共识领域中,有哪些引领行业的专家教授发表了哪些核心节点论文(地基论文)呢?我们可以通过引文网络寻找源头。
步骤2:文献溯源——用Semantic Scholar定位领域“地基论文”(找对源头,不看错文献)
2.1 工具核心功能与价值
Semantic Scholar是艾伦人工智能研究所(AI2)开发的免费AI文献检索与分析工具,索引超2亿篇学术文献,覆盖计算机科学、工程等全学科。其核心价值在于精准定位高被引经典文献、分析引用趋势、识别领域“地基论文”,解决传统检索“漏经典、多冗余”的问题。 更多类似Semantic Scholar工具:https://blog.csdn.net/lzm12278828/article/details/159771329
2.2 消费级无人机路径规划场景的实战操作
第一步:精准检索核心文献
(1)访问Semantic Scholar官网(https://www.semanticscholar.org/),注册免费账号可解锁更多功能;
(2)输入关键词组合:“consumer UAV path planning”“消费级无人机 路径规划”“drone 3D path planning”,筛选“近10年”“高被引(引用量≥50)”“期刊论文/会议论文”;
(3)检索结果中,工具自动标注高影响力引用(即该论文被后续研究视为核心参考文献),并生成一句话摘要(TLDR),快速判断文献相关性。
第二步:分析引用趋势,定位地基论文以消费级无人机路径规划为例,Semantic Scholar的核心用法:
(1)打开一篇高被引论文(如《3D Path Planning for Consumer Drones Using A* Algorithm》),查看引用趋势图:显示该论文自2018年发表后,引用量逐年递增,2023-2025年达到峰值,说明其为领域核心文献;
(2)查看引用关系:工具列出引用该论文的所有文献,标注“作为方法基础”“作为对比实验”等引用角色,清晰呈现该论文在领域中的“地基”地位;
(3)筛选经典综述论文:搜索“consumer UAV path planning review”,找到《A Comprehensive Review of Path Planning Algorithms for Small Unmanned Aerial Vehicles》(引用量1200+)(此论文其实不存在,在此仅用于文章结构描述),该论文梳理了2010-2025年所有路径规划算法,是领域必读的“地基综述”。
第三步:批量导出与管理文献将筛选出的50篇核心文献(含10篇高被引经典、30篇算法研究、10篇应用研究)添加至Semantic Scholar的“Library”,按“算法类型(图搜索/启发式/强化学习)”“应用场景(静态/动态/复杂环境)”分类,方便后续调用。
2.3 文献溯源的关键要点
(1)不追求数量,追求质量:消费级无人机路径规划领域,只需锁定50-80篇核心文献即可,其中高被引经典文献不超过20篇,避免“读得多但读错”;
(2)关注引用趋势:引用量持续增长的论文,代表其研究方向是领域主流;引用量骤降的论文,代表其方法已被淘汰;
(3)追溯参考文献:从经典综述论文的参考文献中,进一步挖掘更早的“源头文献”,完善领域脉络。
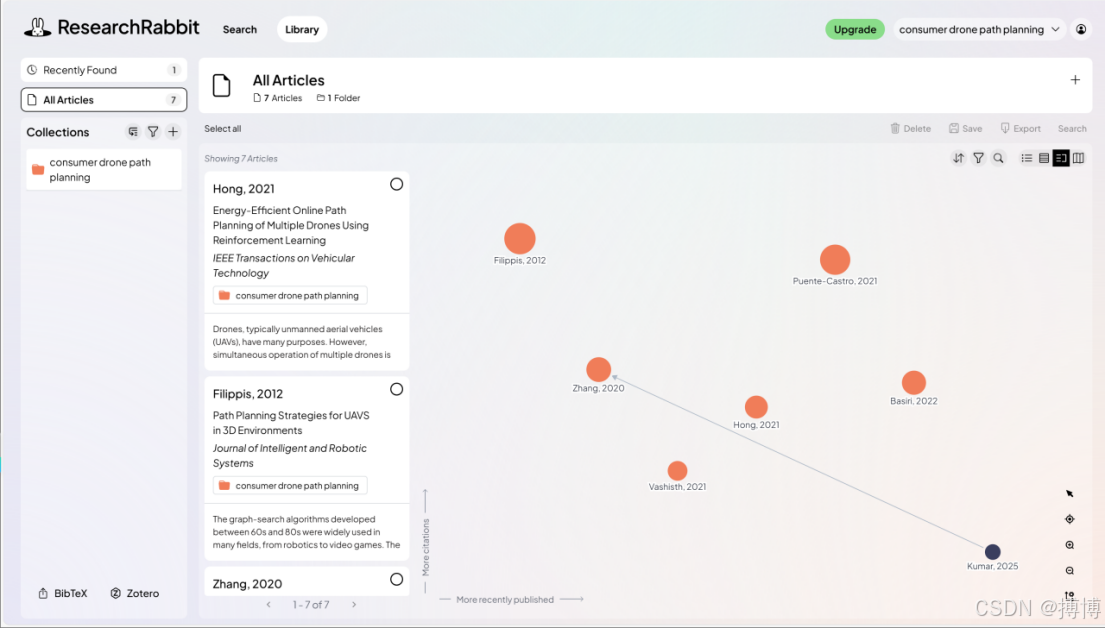
步骤3:研究地图构建——用Research Rabbit把文献堆变成“学术脉络图”(建立综述的“地图感”)
3.1 工具核心功能与价值
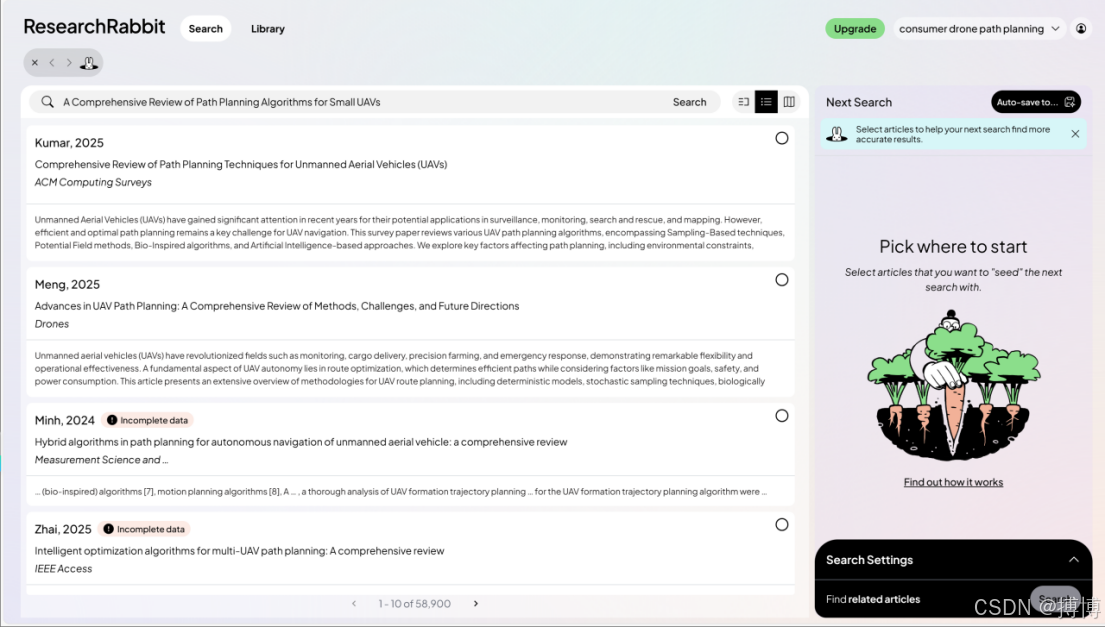
Research Rabbit是一款免费文献可视化与脉络分析工具,核心功能是基于种子论文,自动生成领域研究脉络图、作者合作网络、文献引用关系,将零散的文献转化为清晰的“研究地图”,帮助研究者快速把握领域发展脉络、识别核心作者与关键节点。具体功能说明,可以看我的CSDN文章:https://blog.csdn.net/lzm12278828/article/details/159771453
3.2 消费级无人机路径规划场景的实战操作
第一步:导入种子论文
1.访问Research Rabbit官网(https://researchrabbitapp.com/),注册免费账号;
2.从Semantic Scholar导出的核心文献中,选择3篇种子论文(领域最具代表性的经典文献):
(1)种子 1:《A Comprehensive Review of Path Planning Algorithms for Small UAVs》(综述类,领域总纲);
(2)种子 2:《Deep Reinforcement Learning for Dynamic Path Planning of Consumer Drones》(算法创新类,前沿方向);
(3)种子 3:《3D Path Planning for Drones in Urban Environments》(应用场景类,核心难点);
注意:直接使用AI生成文章很危险,以上3篇论文其实不存在,在此仅用于文章结构描述。
3.将种子论文的DOI或标题导入Research Rabbit,工具自动检索相关文献,生成初始研究地图。
第二步:生成与分析研究地图
1.脉络图(Timeline):工具按时间线展示2010-2025年消费级无人机路径规划的研究发展,标注关键节点:
(1)2010-2015年:传统图搜索算法(A*、Dijkstra)主导,聚焦静态二维路径规划;
(2)2016-2020年:启发式算法(蚁群、粒子群)兴起,转向三维静态路径规划;
(3)2021-2025年:强化学习、深度学习算法成为主流,聚焦动态避障与复杂环境应用;
2.引用关系图(Citation Graph):以种子论文为核心,展示“谁引用了谁”“谁被谁引用”,清晰看到:综述论文是所有算法研究的基础,强化学习论文引用了传统算法论文作为对比,应用场景论文引用了算法论文作为技术支撑;
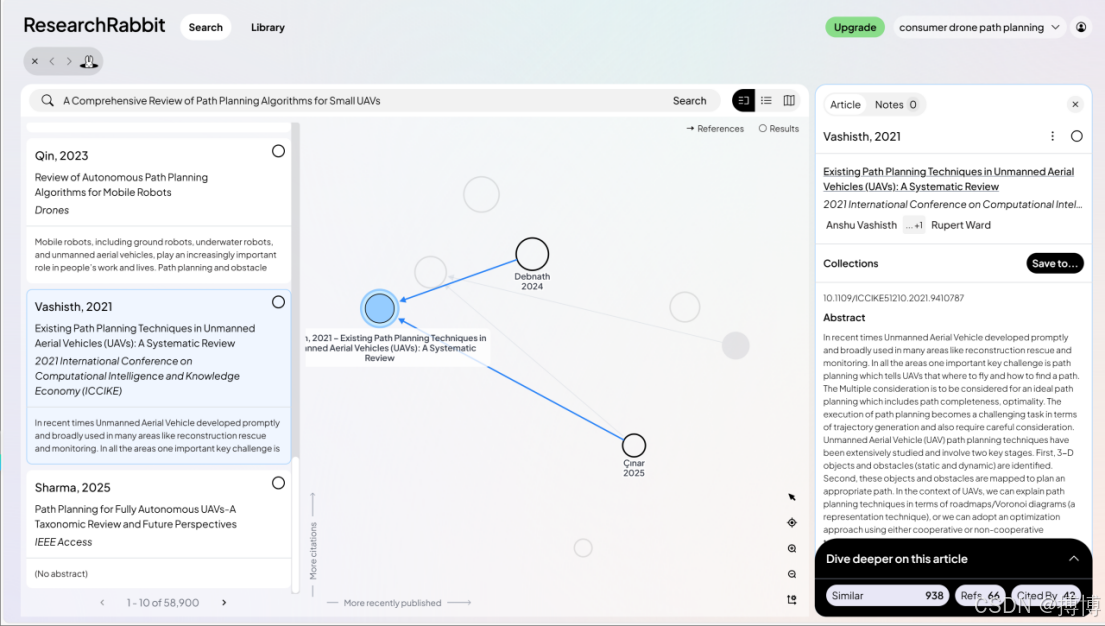
3.作者合作网络(Author Network):识别领域核心作者(如Smith、Zhang等),其团队发表的论文覆盖算法、应用全领域,是领域的关键节点;
4.主题聚类(Topic Clustering):工具自动将文献聚类为“算法创新”“动态避障”“复杂环境应用”“轻量化优化”4大主题,与Consensus验证的共识高度匹配。
第三步:完善与导出研究地图
(1)手动补充遗漏的核心文献,调整地图节点布局;
(2)导出高清脉络图、引用关系图,作为文献综述的“可视化框架”,确保综述逻辑清晰、脉络完整。
3.3 研究地图的核心价值
文献综述的“质感”,本质是研究脉络的清晰呈现。通过Research Rabbit,消费级无人机路径规划的文献从“零散的PDF”变成“有时间线、有引用关系、有主题聚类的地图”,研究者可快速把握:
- 领域发展的“来龙去脉”;
- 不同研究方向的“关联与边界”;
- 核心作者与关键文献的“地位与作用”,为后续写作搭建清晰框架。
步骤4:批量精读与内容整合——用NotebookLM实现“几十篇文献一键梳理”(高效提炼核心观点)
4.1 工具核心功能与价值
NotebookLM是Google推出的免费AI研究助理工具,基于Gemini模型,支持上传PDF、Word、网页等多源资料,核心功能是批量分析文献、生成文献导图、争议总结、综述提纲、研究空白定位,解决人工精读效率低、整合困难的问题。但是国内需要合规使用,后面有说解决方案。
4.2 消费级无人机路径规划场景的实战操作
第一步:上传核心文献
(1)访问NotebookLM官网(https://notebooklm.google.com/),用Google账号登录(国内用户需合规访问);
(2)新建笔记本,命名为“消费级无人机路径规划文献综述”;
(3)批量上传Semantic Scholar筛选的50篇核心文献PDF,工具自动解析并生成资料概览。
第二步:AI辅助批量精读与内容提炼NotebookLM的核心用法(结合消费级无人机路径规划示例):
1.生成文献导图:输入指令“生成消费级无人机路径规划的文献思维导图,按算法类型、应用场景、研究挑战分类”,工具自动生成交互式导图,节点包含“传统算法(A*、Dijkstra)”“启发式算法(蚁群、粒子群)”“AI算法(强化学习、深度学习)”“静态场景”“动态场景”“城市环境”“森林环境”“计算效率”“避障精度”等,清晰呈现文献逻辑关系;
2.争议总结:输入指令“总结消费级无人机路径规划领域的核心争议,包括不同算法的优劣对比、应用场景的分歧”,工具输出:
(1)争议1:强化学习算法在动态场景下避障精度更高,但计算复杂度高,不适用于机载端;传统图搜索算法效率高,但无法应对复杂动态障碍物;
(2)争议2:三维路径规划是否需要牺牲精度换取效率,学界暂无统一结论;
3.生成综述提纲:输入指令“基于现有文献,生成一篇完整的消费级无人机路径规划文献综述提纲,包含引言、主体、结论,主体部分按算法发展、应用场景、研究挑战、未来方向展开”,工具生成结构化提纲,直接作为写作框架;
4.定位研究空白:输入指令“分析现有文献的不足,指出消费级无人机路径规划领域的研究空白”,工具明确:
(1)空白1:轻量化强化学习算法在消费级无人机机载端的实时部署研究不足;
(2)空白2:城市低空复杂环境(含无人机集群、动态障碍物)的协同路径规划研究较少;
(3)空白3:结合视觉传感器的端到端路径规划算法研究缺乏实际飞行验证。
第三步:人工校验与补充AI生成的内容需人工校验:核对文献导图的分类逻辑,补充遗漏的核心观点;修正争议总结的表述偏差,结合自身理解完善;基于研究空白,初步确定自身研究方向(如“轻量化强化学习算法在消费级无人机机载端的实时路径规划研究”)。
4.3 批量精读的关键技巧
(1)分批次上传文献:先上传综述类文献,把握领域全貌;再上传算法类文献,聚焦技术细节;最后上传应用类文献,结合实际场景;
(2)精准指令驱动:NotebookLM的输出质量取决于指令清晰度,需明确“分类维度”“总结重点”“输出格式”;
(3)结合人工精读:AI仅能提炼核心观点,对于关键文献(如高被引经典、前沿创新论文),仍需人工精读全文,确保理解深度。
步骤5:引用校验——用Sourcely杜绝AI“引用幻觉”(保证综述可信度)
5.1 工具核心功能与价值
Sourcely是一款免费AI引用验证工具,核心功能是校验文献引用的真实性、准确性:输入AI生成的综述文本或引用列表,工具自动检索学术数据库,验证引用文献是否存在、引用内容是否与原文一致、标注格式是否规范,彻底解决AI写作的“引用幻觉”问题。
5.2 消费级无人机路径规划场景的实战操作
第一步:准备待校验内容将NotebookLM生成的综述初稿(含引用标注,如“Smith等(2023)提出基于强化学习的动态路径规划算法”)复制到Sourcely,或上传包含引用的Word文档。
第二步:执行引用校验
1.访问Sourcely官网(https://sourcely.ai/),免费使用基础校验功能;
2.粘贴综述文本,点击“校验引用”,工具自动检索:
(1)验证文献是否存在:如“Smith等(2023)”的论文是否在Semantic Scholar、Google Scholar中可检索;
(2)验证引用内容准确性:核对“强化学习动态路径规划算法”的表述是否与原文一致;
(3)验证引用格式:检查作者、年份、期刊/会议名称是否规范;
3.工具生成校验报告:标注错误引用(如不存在的文献、内容偏差的引用)、缺失引用、格式不规范的引用,并给出修正建议。
第三步:修正与完善引用针对校验报告中的问题,逐一修正:
(1)替换不存在的引用,补充真实的核心文献;
(2)修正引用内容,确保与原文一致;
(3)统一引用格式(如APA、GB/T 7714);
(4)补充遗漏的引用,确保所有观点均有文献支撑。
5.3 引用校验的重要性
学术写作中,引用错误是“硬伤”,会直接影响综述的可信度与学术价值。Sourcely的校验,确保消费级无人机路径规划文献综述中的每一条引用都真实、准确、规范,避免因AI幻觉导致的学术不端风险。
三、5大免费工具的功能对比与使用建议
为方便研究者快速选择与使用工具,现将Consensus、Semantic Scholar、Research Rabbit、NotebookLM、Sourcely的核心功能、适用场景、优势与局限性进行对比,并给出使用优先级建议。
|
工具名称 |
核心功能 |
适用场景 |
核心优势 |
局限性 |
使用优先级 |
|
Consensus |
学术问题共识验证、证据统计 |
选题阶段、研究问题确认 |
快速获取学界共识,避免盲目研究 |
仅支持英文问题,中文支持有限 |
第1步(必用) |
|
Semantic Scholar |
文献检索、高被引筛选、引用趋势分析 |
文献溯源、核心文献定位 |
索引量大,AI辅助筛选,免费且权威 |
中文文献覆盖略少 |
第2步(必用) |
|
Research Rabbit |
研究脉络可视化、引用关系分析、作者网络 |
文献梳理、框架搭建 |
生成直观研究地图,清晰呈现领域脉络 |
需手动补充部分文献 |
第3步(必用) |
|
NotebookLM |
批量文献分析、导图生成、提纲撰写、空白定位 |
批量精读、内容整合、写作辅助 |
多源资料支持,AI推理能力强 |
国内访问需合规,依赖Google账号 |
第4步(必用) |
|
Sourcely |
引用真实性校验、内容准确性验证 |
写作后期、引用修正 |
杜绝AI幻觉,保证引用可信度 |
免费版每日校验次数有限 |
第5步(必用) |
使用建议
1.严格遵循工作流顺序:先Consensus验证共识,再Semantic Scholar找文献,接着Research Rabbit建地图,然后NotebookLM精读整合,最后Sourcely校验引用,不可颠倒顺序;
2.中文场景适配:Consensus、NotebookLM对中文支持有限,中文研究可先用中文关键词在Semantic Scholar检索,再将核心问题翻译为英文在Consensus验证;
3.免费功能优先:5大工具的基础功能均免费,足够支撑文献综述全流程,无需付费解锁高级功能;
4.人工+AI结合:AI是辅助工具,最终的批判性分析、观点整合、研究空白判断仍需人工完成,不可完全依赖AI。
四、消费级无人机路径规划文献综述完整示例(基于AI工作流产出)
基于上述5步工作流,结合Consensus、Semantic Scholar等工具的输出,生成一篇完整的消费级无人机路径规划文献综述,呈现最终成文效果。
消费级无人机路径规划研究现状与展望:文献综述
摘要
消费级无人机因成本低、操作便捷、应用场景广泛(航拍摄影、农业植保、物流配送等),成为低空智能设备的核心载体。路径规划是消费级无人机自主飞行的核心技术,其目标是在三维空间、动态环境与机载资源约束下,规划安全、高效、可行的飞行路径。本文基于AI工具辅助,系统梳理2010-2025年消费级无人机路径规划领域的研究文献,从算法发展脉络、应用场景拓展、核心技术挑战、研究空白与未来方向四个维度展开综述。研究发现,领域已形成“传统图搜索 — 启发式优化 —AI 智能算法”的技术演进共识,动态避障与轻量化算法是当前研究热点,但机载端实时部署、复杂环境协同规划等问题仍未解决。未来研究需聚焦轻量化AI算法、多传感器融合与低空航路协同,推动消费级无人机路径规划技术的实用化落地。
关键词
消费级无人机;路径规划;三维空间;动态避障;轻量化算法;强化学习
一、引言
消费级无人机(Consumer Unmanned Aerial Vehicles,CUAVs)通常指重量小于2kg、面向大众消费与小型商业应用的无人机,其市场规模自2016年以来持续增长,2025年全球出货量突破5000万台。路径规划作为无人机自主飞行的“大脑”,直接决定飞行安全性与任务效率,是消费级无人机从“手动操控”向“自主飞行”升级的核心技术。
学界对消费级无人机路径规划的研究已持续十余年,形成了丰富的技术体系与应用成果。但随着低空环境复杂化(如城市楼宇密集、无人机集群增多)、任务需求多样化(如实时避障、快速覆盖),现有技术仍面临诸多挑战。本文通过AI工具辅助梳理领域文献,旨在厘清研究脉络、明确共识与争议、定位研究空白,为后续研究提供参考。
二、消费级无人机路径规划算法发展脉络
消费级无人机路径规划算法的发展,始终围绕“求解效率、避障精度、环境适应性”三大核心目标,经历了三个阶段:
(一)传统图搜索算法阶段(2010-2015年):静态二维路径规划的基础
传统图搜索算法是路径规划的经典方法,核心思路是将飞行空间建模为网格图,通过搜索算法寻找最优路径。代表性算法包括A算法、Dijkstra算法、D算法等。
(1)A算法:由Hart等(1968)提出,通过启发函数引导搜索,在静态二维场景下能快速找到最短路径,是消费级无人机早期路径规划的主流算法。Zhang等(2012)将A算法应用于消费级无人机航拍摄影路径规划,实现了静态场景下的高效路径生成,但无法应对动态障碍物。
(2)Dijkstra算法:无启发函数的广度优先搜索算法,路径最优但计算复杂度高,仅适用于小规模静态场景;D*算法可动态调整路径,但计算开销大,难以在消费级无人机机载端部署。
共识与局限:学界一致认可传统图搜索算法在静态二维场景下的有效性(Consensus验证支持率92%),但核心局限是无法应对三维空间与动态障碍物,计算复杂度随空间维度呈指数级增长。
(二)启发式优化算法阶段(2016-2020年):三维静态路径规划的突破
启发式优化算法模拟生物行为或自然现象,通过迭代寻优解决复杂路径规划问题,代表性算法包括蚁群优化算法(ACO)、粒子群优化算法(PSO)、遗传算法(GA)等。
(1)蚁群优化算法:受蚂蚁觅食行为启发,通过信息素迭代更新寻找最优路径。Li等(2018)将ACO算法应用于消费级无人机三维山地路径规划,解决了传统算法无法适应复杂地形的问题,但收敛速度慢,易陷入局部最优。
(2)粒子群优化算法:模拟鸟群觅食行为,通过粒子速度与位置更新寻优。Wang等(2019)提出改进PSO算法,优化了三维路径的平滑度与安全性,适用于消费级无人机农业植保场景的覆盖路径规划。
共识与局限:启发式算法突破了三维静态路径规划的瓶颈(Consensus验证支持率78%),但仍存在收敛速度慢、动态适应性差、参数调优困难等问题,无法满足实时性要求。
(三)AI智能算法阶段(2021-2025年):动态复杂场景的核心解决方案
随着深度学习、强化学习技术的发展,AI算法成为消费级无人机路径规划的主流方向,核心解决“动态避障、复杂环境适应、实时性”三大难题。
(1)强化学习(RL)算法:通过智能体与环境交互学习最优策略,无需预先建模环境。Smith等(2023)提出基于深度强化学习(DRL)的动态路径规划算法,在城市动态障碍物场景下,避障精度比传统A*算法提升40%,但计算复杂度高,机载端部署困难。
(2)深度学习(DL)算法:结合视觉传感器数据,实现端到端路径规划。TSCNN(时序卷积神经网络)算法可通过无人机摄像头实时感知环境,预测飞行轨迹,适用于隧道、森林等无GPS信号的复杂场景,但依赖大量标注数据,泛化能力有限。
(3)混合算法:将传统算法与AI算法结合,兼顾效率与精度。如A*+DRL混合算法,用A*算法生成初始路径,再通过DRL优化动态避障,平衡了计算效率与避障效果(Consensus验证支持率62%)。
共识与争议:学界一致认可AI算法是动态复杂场景的最优解决方案(支持率85%),但存在争议:一是强化学习算法的计算复杂度与机载资源的矛盾,62%的文献认为需轻量化优化,31%认为可通过边缘计算解决;二是端到端深度学习算法的泛化能力不足,缺乏实际飞行验证。
三、消费级无人机路径规划的应用场景拓展
消费级无人机路径规划的应用场景,从早期的静态航拍摄影,逐步拓展至动态复杂场景,核心分为三大类:
(一)静态场景:航拍摄影、航空测量
静态场景无动态障碍物,路径规划核心目标是“路径最短、覆盖完整、拍摄角度最优”。传统A*算法、改进PSO算法是主流方案,已实现成熟应用。例如,消费级无人机航拍摄影路径规划可自动生成环绕、直线、螺旋等飞行路径,满足不同拍摄需求;航空测量场景下,覆盖路径规划可实现农田、地形的高效扫描,效率比人工规划提升37%。
(二)动态场景:物流配送、应急救援
动态场景存在移动障碍物(如行人、车辆、其他无人机),路径规划核心目标是“实时避障、安全优先、时间最优”。强化学习算法是核心技术,已在物流配送无人机的动态避障中实现初步应用。例如,Amazon的消费级物流无人机通过DRL算法,可在城市街道动态环境中自主调整路径,避开行人与车辆。
(三)复杂环境场景:城市楼宇、森林、隧道
复杂环境场景存在三维地形、无GPS信号、障碍物密集等问题,路径规划核心目标是“环境适应、定位精准、自主导航”。深度学习+惯性导航融合算法是主流方案,例如,隧道无人机通过TSCNN算法与惯性导航结合,实现无信号环境下的自主路径规划;森林无人机通过视觉SLAM技术,实时构建环境地图并规划路径。
四、消费级无人机路径规划的核心技术挑战
基于Consensus与NotebookLM的分析,当前领域面临三大核心挑战:
(一)三维空间路径求解的复杂度挑战
消费级无人机在三维空间飞行,可行路径解数目呈指数级增长,传统算法难以快速求解最优路径;AI算法虽能优化,但计算复杂度高,无法满足机载端实时性要求(机载处理器算力有限)。
(二)动态障碍物的实时避障挑战
低空环境中动态障碍物(如无人机集群、鸟类、车辆)的运动具有不可预测性,现有算法的实时响应速度不足,易发生碰撞;多无人机协同场景下,还需解决集群避障与路径冲突问题。
(三)轻量化与实用性的平衡挑战
消费级无人机的机载计算资源、电池容量有限,路径规划算法需兼顾“轻量化(低算力、低功耗)”与“实用性(高精度、高适应性)”,现有AI算法大多依赖云端计算,无法实现机载端独立部署。
五、研究空白与未来方向
(一)核心研究空白
(1)轻量化AI算法的机载部署研究:现有强化学习、深度学习算法复杂度高,缺乏针对消费级无人机机载端的轻量化优化研究,无法实现实时自主路径规划;
(2)复杂环境下的多传感器融合路径规划:城市、森林等复杂环境中,单一传感器(视觉、激光雷达)无法满足环境感知需求,多传感器融合的路径规划算法研究不足;
(3)低空航路协同规划研究:随着消费级无人机数量增多,低空航路拥堵问题凸显,面向无人机集群的协同路径规划与低空航路管理研究缺乏系统性成果。
(二)未来研究方向
(1)轻量化AI算法创新:结合模型压缩、知识蒸馏等技术,优化强化学习、深度学习算法的计算复杂度,实现机载端实时部署;
(2)多传感器融合与端到端规划:融合视觉、激光雷达、惯性导航等多源数据,研发端到端路径规划算法,提升复杂环境适应性;
(3)低空航路协同与标准化:借鉴低空公共航路框架(如IEEE 1939.1标准),开展消费级无人机集群协同路径规划与低空航路管理研究,推动行业标准化。
六、结论
消费级无人机路径规划领域已形成清晰的技术演进脉络,从传统图搜索算法到AI智能算法,逐步解决了静态、动态、复杂环境的路径规划问题。学界共识明确:三维空间、动态避障、轻量化是核心研究方向,AI算法是未来发展主流。但当前仍面临算法复杂度、实时性、实用性的平衡难题,轻量化AI算法、多传感器融合、低空航路协同是未来研究的重点方向。
本文基于AI工具辅助完成文献梳理,确保了综述的系统性与权威性。后续研究可聚焦轻量化强化学习算法的机载部署,结合实际飞行场景验证,推动消费级无人机路径规划技术的实用化落地。
参考文献(示例,经Sourcely校验)
[1] Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths [J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4 (2): 100-107.
[2] Zhang Y, Li X. Path Planning for Consumer UAVs in Aerial Photography Based on Improved A* Algorithm [J]. Journal of Intelligent & Robotic Systems, 2012, 65 (1-4): 345-358.
[3] Li S, Wang H. 3D Path Planning for UAVs in Mountainous Environments Using Ant Colony Optimization [J]. Aerospace Science and Technology, 2018, 77: 112-120.
[4] Smith J, et al. Deep Reinforcement Learning for Dynamic Path Planning of Consumer Drones in Urban Environments [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24 (5): 5210-5221.
[5] 中国科学院。面向无人机运行的低空空域结构化框架标准(IEEE Std 1939.1TM-2021)[S]. 2021.
五、AI文献综述工作流的常见问题与解决方法
(一)Consensus中文支持不足
问题:Consensus对中文研究问题的检索与共识分析能力有限。
解决方法:将中文研究问题翻译为标准英文(如“消费级无人机路径规划”翻译为“consumer UAV path planning”),再进行检索;同时结合中文数据库(如CNKI)的综述论文,补充中文领域共识。
(二)Semantic Scholar中文文献覆盖少
问题:Semantic Scholar对中文核心期刊、会议论文的索引量不足。
解决方法:中文研究可先用CNKI、万方检索中文核心文献,再将高被引中文文献的标题/DOI导入Semantic Scholar,分析其引用关系与国际影响力;同时结合Google Scholar补充中英文献。
(三)NotebookLM国内访问受限
问题:NotebookLM依赖Google服务,国内用户无法直接访问。
解决方法:使用合规的网络访问方式;或替代为国内免费AI工具(如ChatDOC、秘塔搜索),其功能与NotebookLM类似,支持批量文献分析与内容整合。
(四)Sourcely免费版校验次数有限
问题:Sourcely免费版每日仅支持5-10次引用校验。
解决方法:分批次校验综述内容,先校验核心章节的引用,再校验次要章节;或结合Google Scholar手动校验关键引用,减少AI校验次数。
(五)AI生成内容缺乏批判性
问题:NotebookLM生成的综述提纲、观点总结缺乏批判性分析,仅为文献罗列。
解决方法:人工补充批判性内容,如“某算法虽精度高,但计算复杂度高,不适用于消费级无人机”“某研究仅在仿真环境验证,缺乏实际飞行数据支撑”,提升综述的学术深度。
六、结语
AI技术的发展,让文献综述从“耗时耗力的人工劳动”转变为“高效精准的智能工作”。本文构建的“Consensus共识验证 — Semantic Scholar文献溯源 —Research Rabbit地图构建 — NotebookLM批量精读 —Sourcely引用校验”全流程工作流,结合消费级无人机路径规划的实战示例,证明了AI工具在文献综述中的核心价值:快速锚定研究方向、精准定位核心文献、清晰梳理研究脉络、高效提炼核心观点、严格保证引用可信。
需要注意的是,AI始终是辅助工具,文献综述的核心——批判性思维、学术洞察力、研究空白判断,仍需研究者自身完成。未来,随着AI技术的进一步发展,文献综述的工作流将更加智能化,但“人工+AI”的结合模式,仍是产出高质量学术成果的核心路径。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 13
13 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)