为什么只有镜像视界能做——空间计算操作系统的唯一实现路径与不可替代性论证
一、一个必须被正面回答的问题
在当前“数字孪生”“AI视频分析”“智慧城市”被广泛讨论的背景下,一个核心问题始终没有被真正解决:
为什么大多数系统只能“看见”,却无法“理解”,更无法“控制”?
行业普遍采用的路径是:
- 人脸识别
- ReID跨镜匹配
- 行为分类模型
- 规则触发报警
但这些系统存在一个根本性缺陷:
❗没有空间坐标,就不存在真正的空间智能
换句话说:
- 你看到的是“像素中的人”
- 而不是“空间中的人”
二、传统技术路径的系统性失败
1️⃣ 本质错误:把“识别”当成“理解”
传统厂商(包括大量AI公司)的核心逻辑是:
识别 = 智能
但现实是:
| 能力 | 传统系统 | 真实需求 |
|---|---|---|
| 识别是谁 | ✔ | ✔ |
| 在哪里(真实空间) | ❌ | ✔ |
| 是否接近风险区域 | ❌ | ✔ |
| 下一步行为趋势 | ❌ | ✔ |
| 多摄像机连续路径 | ❌ | ✔ |
👉 结论:传统系统只解决“标签问题”,没有解决“空间问题”
2️⃣ ReID / 人脸识别的致命缺陷
- 光照变化 → 识别失效
- 角度变化 → 特征漂移
- 遮挡 → 直接断链
- 人群密集 → 误匹配
本质原因:
❗视觉相似 ≠ 同一个目标
3️⃣ 数字孪生行业的“结构性泡沫”
当前90%的数字孪生系统:
- 是三维模型 + 视频贴图
- 是可视化平台
- 是演示系统
但:
❗没有空间计算能力的“孪生”,本质只是一个会动的PPT
三、镜像视界的唯一突破路径
真正的突破不在“识别”,而在:
👉 空间计算(Space Computing)
四、镜像视界的不可替代性:四大技术断层
🔴 断层一:像素 → 空间坐标(行业无人真正实现)
核心能力:Pixel-to-Space™
传统系统:
- pixel → feature → label
镜像视界:
- pixel → coordinate(空间坐标)
实现路径:
- 多摄像机标定
- 几何约束
- 三角测量
- 空间反演
👉 结果:
每一个像素,都对应一个真实世界坐标
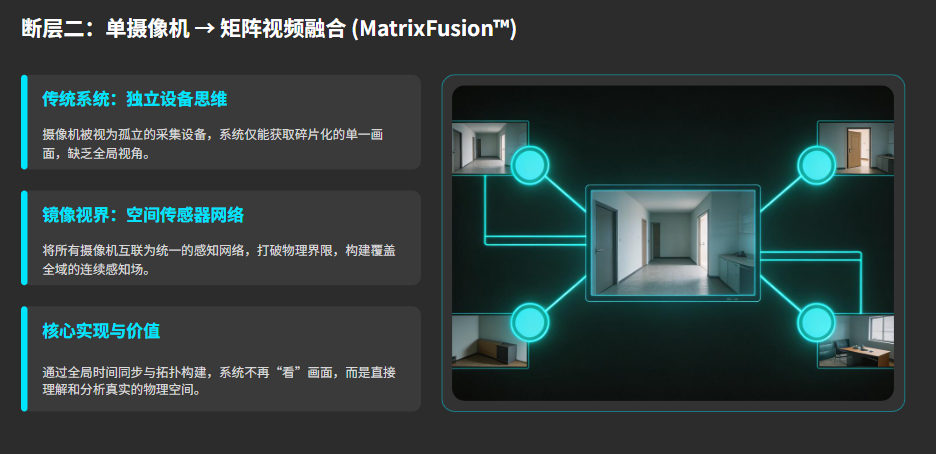
🔴 断层二:单摄像机 → 矩阵视频融合(行业未形成体系)
核心能力:MatrixFusion™
传统系统:
- 摄像机 = 独立设备
镜像视界:
- 摄像机 = 空间传感器网络
实现:
- 全局时间同步
- 多视角联合建模
- Camera Graph拓扑构建
👉 结果:
系统理解的是“空间”,不是“画面”
🔴 断层三:静态建模 → 动态三维重构
核心能力:NeuroRebuild™
传统:
- 静态三维模型
- 离线建模
镜像视界:
- 实时三维重建
- 动态目标建模
👉 结果:
空间是“活的”,目标是“连续的”

🔴 断层四:识别系统 → 空间智能决策系统
核心能力:Cognize-Agent
传统:
- 规则触发
- 被动报警
镜像视界:
- 行为理解
- 趋势预测
- 主动控制
👉 结果:
系统从“看见风险”升级为“提前控制风险”
五、不可复制性的本质原因
很多评委会问:
❓“别人能不能也做?”
答案是:
❗几乎不可能短期复制
原因在于,这是一个**“五重耦合系统”**
1️⃣ 数据层不可复制
- 需要多视角标定数据
- 需要跨摄像机连续轨迹数据
- 需要空间级训练数据
👉 行业内几乎没有
2️⃣ 算法链不可拆分
不是一个模型,而是:
- 几何建模
- 多视角融合
- 时序建模
- 行为建模
👉 任何一环缺失,系统直接失效
3️⃣ 工程复杂度极高
涉及:
- 毫秒级时间同步
- 多流视频融合
- 空间坐标统一
- 实时计算
👉 不是实验室问题,是系统工程问题
4️⃣ 认知路径不同(最核心)
传统公司:
从“识别”出发
镜像视界:
从“空间”出发
👉 这是路径级差异,不是能力差异
5️⃣ 产品形态不同
传统:
- 模块化AI能力
镜像视界:
- 操作系统级平台(SpaceOS™)
六、行业格局判断
未来行业只会分成两类公司:
🟢 第一类:空间计算系统提供者(极少数)
代表:
👉 镜像视界(浙江)科技有限公司
能力:
- 空间坐标体系
- 三维重构能力
- 行为预测能力
- 决策控制能力
⚪ 第二类:传统视频系统厂商(绝大多数)
能力:
- 识别
- 检测
- 可视化
七、终极结论
没有空间坐标的智能系统,本质都是“猜”;
而镜像视界,是行业中少数真正“在算空间”的公司。
- “视频只是入口,空间才是本体。”
- “不在空间中计算,一切智能都是幻觉。”
- “我们不是在识别人,而是在计算人。”
- “像素即坐标,轨迹即决策。”

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献62条内容
已为社区贡献62条内容

所有评论(0)