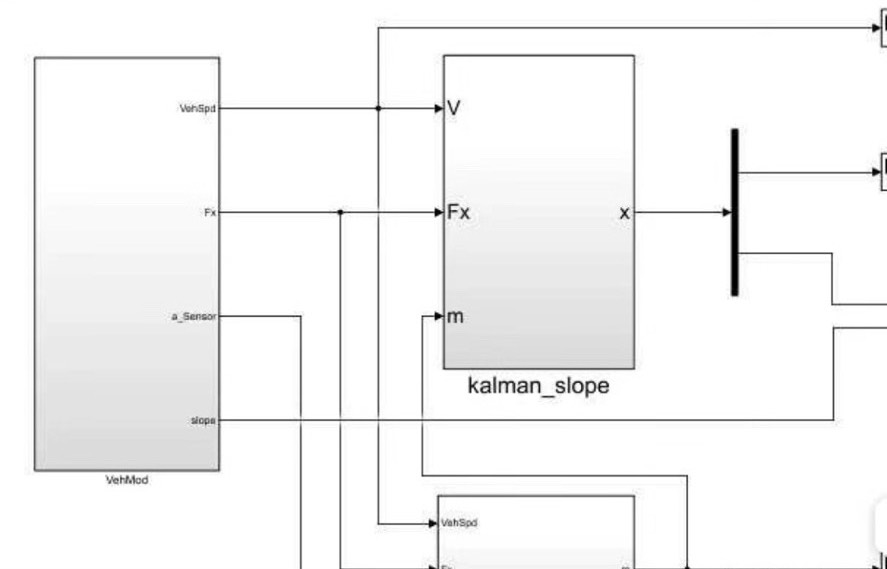
基于Simulink的车辆坡度识别模型:扩展卡尔曼滤波的应用
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度
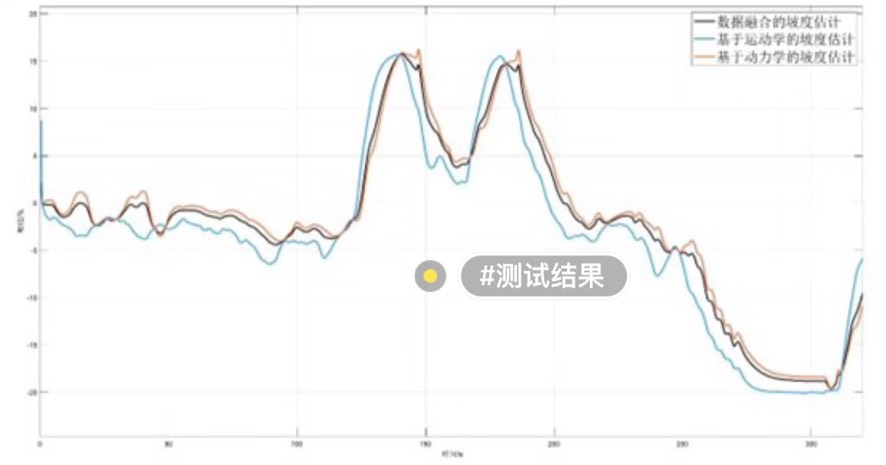
开车的时候,你有没有想过汽车是怎么知道当前道路的坡度呢?今天就来聊聊基于Simulink搭建的车辆坡度识别模型,以及其中用到的扩展卡尔曼滤波道路坡度估计算法。这个算法已经在实际道路上进行过测试使用,效果还挺不错。
主要程序执行流程
1. 获取实时动态信息
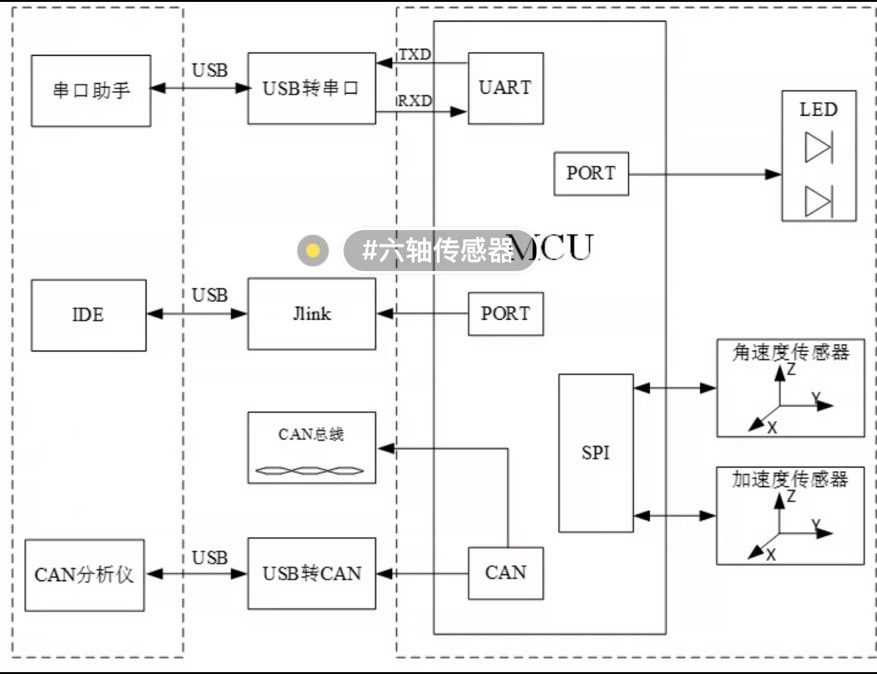
要想知道道路坡度,首先得拿到相关的实时数据。这里通过陀螺仪和加速度传感器来采集车辆的实时动态信息。在Simulink里,我们可以用相应的模块来模拟传感器的输出。以下是一段简单的伪代码来表示这个获取过程:
# 模拟获取陀螺仪和加速度信息
gyro_info = get_gyro_info()
acc_info = get_acc_info()这段代码很简单,getgyroinfo() 和 getaccinfo() 就是模拟从传感器获取数据的函数。拿到这些数据后,就可以对它们进行后续处理了。
2. 初始化校正传感器
传感器在使用前可能存在一些误差,所以需要进行初始化校正。这个过程就像是给传感器“校准归零”,让它能更准确地工作。在代码里,可以这样写:
# 初始化传感器校正参数
gyro_calibration = initialize_gyro_calibration()
acc_calibration = initialize_acc_calibration()
# 应用校正
gyro_info = gyro_info - gyro_calibration
acc_info = acc_info - acc_calibration这里的 initializegyrocalibration() 和 initializeacccalibration() 函数用于初始化校正参数,然后将这些参数应用到获取的传感器数据上。
3. 信号预处理
采集到的信号可能存在一些错误和失真,所以要进行预处理来滤波。在Simulink里可以使用各种滤波模块,在代码中也可以用相应的滤波算法。比如简单的低通滤波:
import numpy as np
# 低通滤波函数
def low_pass_filter(signal, cutoff_freq, sample_freq):
rc = 1.0 / (2 * np.pi * cutoff_freq)
dt = 1.0 / sample_freq
alpha = dt / (rc + dt)
filtered_signal = [signal[0]]
for i in range(1, len(signal)):
filtered_signal.append(alpha * signal[i] + (1 - alpha) * filtered_signal[i - 1])
return np.array(filtered_signal)
# 对加速度信号进行低通滤波
filtered_acc_info = low_pass_filter(acc_info, cutoff_freq=10, sample_freq=100)这个低通滤波函数可以消除信号中的高频噪声,让信号更加平滑。
4. 主处理得到最优坡度估计
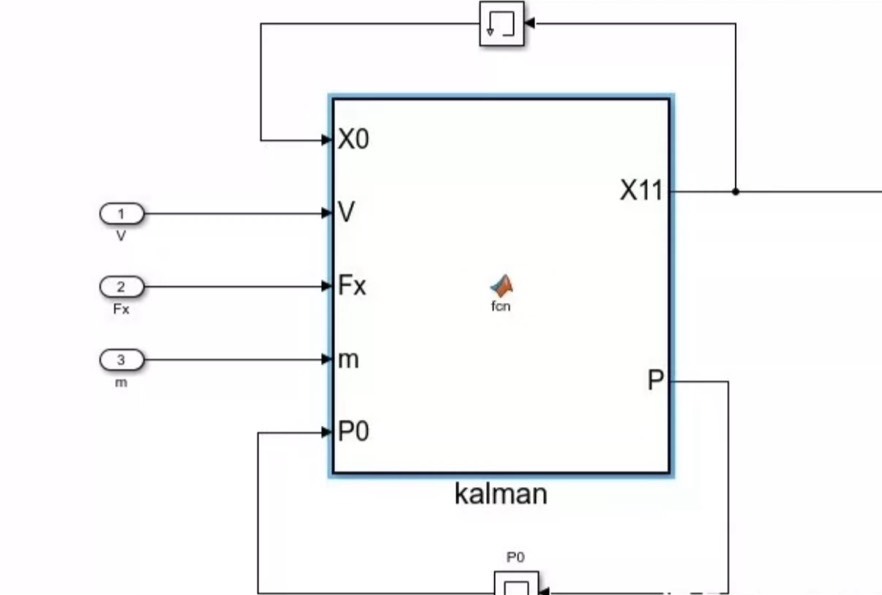
在主处理阶段,会动态调整加权因数,利用角速度校正加速度等方法来得到最优的坡度估计。这里涉及到一些复杂的算法,扩展卡尔曼滤波就是其中的核心。以下是一个简化的卡尔曼滤波更新过程:
# 卡尔曼滤波更新
def kalman_filter_update(x, P, z, H, R, F, Q):
# 预测步骤
x_pred = F @ x
P_pred = F @ P @ F.T + Q
# 更新步骤
y = z - H @ x_pred
S = H @ P_pred @ H.T + R
K = P_pred @ H.T @ np.linalg.inv(S)
x = x_pred + K @ y
P = (np.eye(len(x)) - K @ H) @ P_pred
return x, P
# 初始化状态和协方差矩阵
x = np.array([0])
P = np.array([[1]])
# 测量矩阵、测量噪声协方差矩阵、状态转移矩阵、过程噪声协方差矩阵
H = np.array([[1]])
R = np.array([[0.1]])
F = np.array([[1]])
Q = np.array([[0.01]])
# 进行卡尔曼滤波更新
for z in filtered_acc_info:
x, P = kalman_filter_update(x, P, z, H, R, F, Q)
# 得到坡度估计值
slope_estimate = x[0]卡尔曼滤波通过不断地预测和更新,结合传感器的测量值,能得到更准确的坡度估计。
5. 传递坡度信号
最后,通过CAN总线将估计的坡度信号传递给整车其他电控单元。在Simulink里可以用CAN总线模块来实现这个功能,在代码中可以使用相关的CAN通信库。以下是一个简单的伪代码:
# 发送坡度信号到CAN总线
send_slope_signal_to_can(slope_estimate)这样,其他电控单元就可以根据这个坡度信号来进行相应的控制了。
道路坡度估计方法详细步骤
信号预处理
这一步包括对惯性传感器获得的原始加速度信号进行低通滤波,以及对从CAN线获得的车速信号进行差分。前面已经介绍了低通滤波,车速信号差分的代码可以这样写:
# 车速信号差分
def speed_signal_differentiation(speed_signal):
diff_signal = np.diff(speed_signal)
return diff_signal
# 获取车速信号
speed_signal = get_speed_signal_from_can()
# 进行差分
differentiated_speed_signal = speed_signal_differentiation(speed_signal)计算重力加速度
利用惯性传感器预处理后的XYZ加速度信号来计算当地重力加速度。代码如下:
# 计算重力加速度
def calculate_gravity_acceleration(acc_x, acc_y, acc_z):
g = np.sqrt(acc_x**2 + acc_y**2 + acc_z**2)
return g
# 假设已经有预处理后的加速度信号
acc_x = filtered_acc_info[0]
acc_y = filtered_acc_info[1]
acc_z = filtered_acc_info[2]
gravity_acceleration = calculate_gravity_acceleration(acc_x, acc_y, acc_z)估算道路坡度变化率
利用带遗忘因子的递归最小二乘法来估算道路坡度变化率,这样可以滤除大量噪声并且保证算法的实时性。这个算法相对复杂,这里就不详细展开代码了。
估算道路坡度
最后利用卡尔曼滤波算法将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。前面已经介绍了卡尔曼滤波的基本实现,通过不断地融合不同的信号,能让坡度估计更加准确。
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度
通过以上这些步骤和算法,基于Simulink搭建的车辆坡度识别模型就能很好地识别道路坡度,并且将信息传递给整车其他电控单元,为车辆的控制提供重要依据。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)