3.37 基于简化图卷积与对抗高斯过程回归的小样本室内定位模型
文献来源:Li X, Guo Y, Li F. Few-shot indoor localization model based on simplified graph convolution and adversarial Gaussian process regression[J]. IEEE Internet of Things Journal, 2025.

一段话总结
本文针对RSSI 指纹室内定位中采样成本高、数据稀疏、环境干扰导致匹配不准的问题,提出稀疏采样策略与SGC-AGPR 小样本定位模型:通过改进 GAN生成高质量指纹数据训练高斯过程回归(GPR),为虚拟参考点提供初始指纹,再利用简化图卷积(SGC)融合空间拓扑与自适应相似度权重完成指纹增强;最终在8m×8m实验区域实现平均定位误差 0.84m,精度超越传统密集采样与稀疏直接定位方法,大幅降低离线建库成本。
一、研究背景与问题
- 应用价值室内定位是智能家居、物联网、资产追踪的核心支撑技术,室外定位技术在室内失效。
- 主流方案基于RSSI 指纹的定位法精度高、适配性强,分为离线采样与在线匹配两步。
- 核心痛点
- 指纹采集成本极高,需要密集采样,难以规模化部署
- RSSI 易受环境干扰,多径、遮挡、人员移动导致数据波动
- 稀疏样本下定位精度急剧下降,指纹匹配易出错
- 现有方法不足众包、半监督、路径损耗模型、普通 GAN 均无法同时解决稀疏性与鲁棒性问题。
二、核心创新与方法
1. 整体框架:SGC-AGPR 小样本定位模型

图 2 展示了基于 SGC-AGPR 的小样本室内定位模型整体框架,主要包括离线稀疏采样、AGPR 数据增强、SGC 指纹特征融合,以及在线 WKNN 定位四个核心部分,实现低采样成本下的高精度定位。
图 1 (b)虚线框里:一个真实点周围的邻居浅绿 = GIP(网格交点)深绿 = GCP(网格中心)
意思:合成虚拟点时,会参考空间相邻的真实点,用图卷积融合邻居信息。
图 1 (c)绿点:应该匹配最近的正确点 黄点:错误匹配到远处的点 意思:传统指纹匹配容易匹配错,因为信号干扰、样本稀疏。本文要解决这个问题。
图 1 (d) 红点:真实参考点 绿点:算法合成的虚拟点(GIP + GCP) 意思:经过 AGPR + SGC 合成后稀疏点 → 变密集指纹库点更多、分布更均匀,定位更准。
- 稀疏指纹采样:仅采集少量真实参考点 (RP)
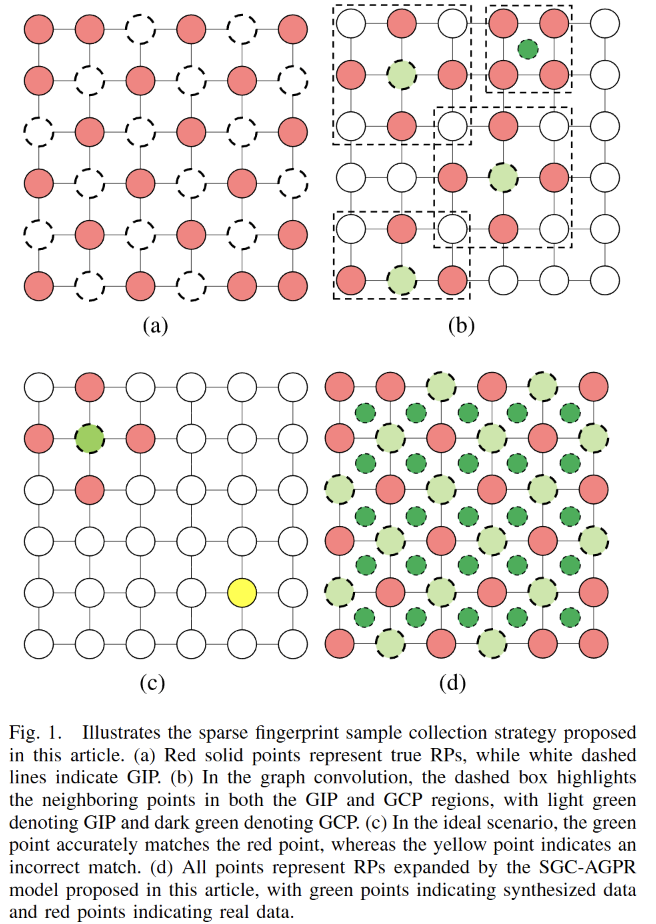
- 图 1 展示了本文的稀疏采样策略:仅采集少量真实参考点,通过 SGC‑AGPR 合成虚拟参考点,将稀疏指纹库扩充为密集均匀的指纹库,解决采样成本高、匹配不准的问题。
-
图 1 (a)红色实心点:真实采集的参考点(RP)白色虚线点:没采集、需要合成的虚拟点(GIP)意思:我们只采很少的真实点,剩下的用算法生成。
- AGPR:对抗高斯过程回归,生成虚拟点初始指纹
- SGC:简化图卷积,融合空间拓扑提升指纹质量
- WKNN:在线定位输出坐标
2. AGPR(对抗高斯过程回归)
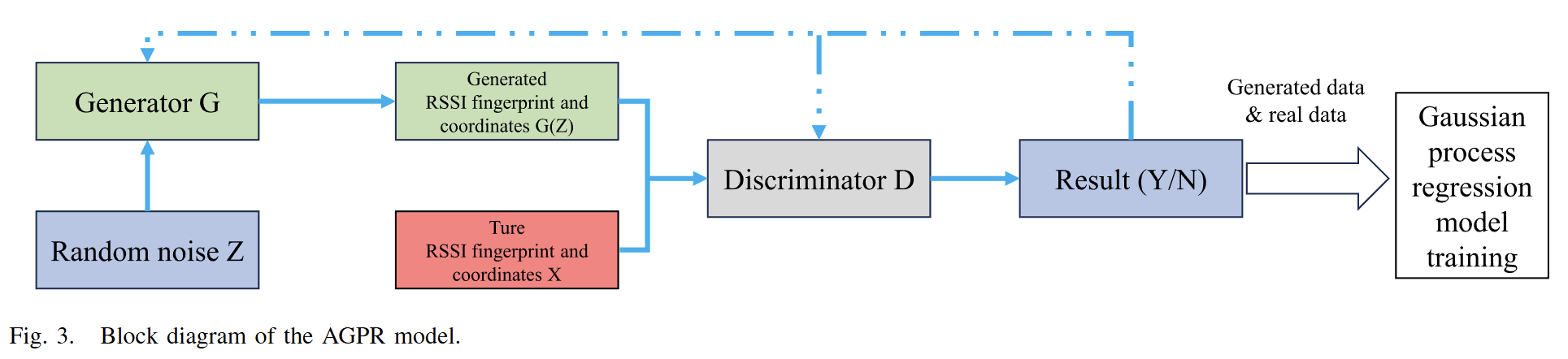
图 3 对抗高斯过程回归(AGPR)模型结构。该模型通过 GAN 生成扩充指纹数据,经质量检测后用于训练高斯过程回归,最终输出虚拟参考点的初始指纹值。
- 改进 GAN 生成指纹
- 损失函数:对抗损失 + 重构损失
- 加入质量检测机制,过滤无效生成数据
- GPR 预测初始值
- 以信号衰减模型为均值函数
- 高斯核 (RBF) 学习位置与 RSSI 映射
- 为 **GIP(网格交点)与GCP(网格中心)** 提供初始指纹
3. SGC(简化图卷积)
- 邻域特征聚合:融合自身特征与邻节点特征
- 自适应相似度权重
- 计算欧氏距离→归一化权重
- 越相似邻点权重越高,提升匹配准确性
- 保留空间拓扑关系,增强指纹区分度
4. 虚拟参考点(SRP)
- GIP:网格交叉点
- GCP:网格中心点
- 真实点与虚拟点交错均匀分布,保证增强合理性
三、实验配置
1. 实验环境
- 区域:8m×8m 室内空间
- 设备:4 个 BLE 信标,手机作为接收器
- 参考点:总计 64 个 RP(49 个真实,16 个 GIP)
- 合成 SRP:65 个(16 GIP + 49 GCP)
2. 数据预处理
对比 4 种滤波算法,高斯滤波效果最优。
3. 模型参数
- PM-GIP:K=7
- PM-GIP&GCP:K=8
四、实验结果与对比
1. 关键指标(最优模型:PM-GIP&GCP)
表格
| 指标 | 数值 |
|---|---|
| 平均定位误差 | 0.84 m |
| 60% 误差 | 0.65 m |
| 75% 误差 | 1.11 m |
| 标准差 | 0.90 |
2. 方法对比(平均误差)
表格
| 方法 | 含义 | 平均误差 (m) |
|---|---|---|
| Sparse-RP | 仅稀疏真实点 | 1.16 |
| GAD | 仅 GAN 生成 | 1.01 |
| AGPR | GAN+GPR | 0.99 |
| FOD | 全量密集数据 | 0.93 |
| PM-GIP | 本文 + GIP | 0.91 |
| PM-GIP&GCP | 本文 + GIP+GCP | 0.84 |
3. 关键结论
- 本文模型精度超过全量密集采样(FOD)
- SGC 能显著提升邻点相似度,增强指纹稳定性
- GCP 虚拟点可进一步提升精度
- 稀疏采样 + 数据增强可大幅降低采集成本
五、结论与展望
- 结论提出的SGC-AGPR在稀疏样本下实现高精度室内定位,平均误差 0.84m,可替代传统密集采样方案。
- 展望
- 拓展到大型场景、多楼层、动态环境
- 优化 WKNN 或使用更先进匹配算法
- 进一步抗干扰、保护隐私
4. 关键问题与答案
问题 1:本文要解决的核心行业痛点是什么?传统方法为什么解决不好?
答案:核心痛点是RSSI 指纹定位采集成本太高、稀疏样本下精度差、信号易受干扰匹配不准。传统方法中,众包数据不可靠,半监督依赖大量未标注数据,路径损耗模型需要环境先验,普通 GAN 生成数据不符合物理规律,均无法在极少量样本下同时保证精度与鲁棒性。
问题 2:AGPR 与 SGC 分别承担什么作用?为什么要组合使用?
答案:AGPR负责用 GAN 生成数据训练 GPR,为虚拟参考点(GIP/GCP)提供符合信号分布的初始指纹;SGC利用图卷积聚合邻域信息,通过自适应相似度权重强化空间拓扑关系,提升指纹区分度。两者组合实现 “先补全数据→再增强特征”,解决稀疏与噪声问题。
问题 3:实验中 GIP 和 GCP 分别是什么?加入 GCP 为什么能进一步提升精度?
答案:GIP 是网格交点,GCP 是网格中心点。GCP 位于真实点与 GIP 之间,能补充更精细的空间位置信息,让指纹库分布更密集均匀,减少位置盲区与特征模糊区,因此 PM-GIP&GCP 比仅用 GIP 的误差更低(从 0.91m 降至 0.84m)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)