线控转向系统动力学法 Carsim 和 Simulink 联合仿真模型探索
线控转向系统动力学法 Carsim和Simulink联合仿真模型 Carsim是2020版本,Matlab是2019b版本 1、一个基于横摆角速度增益不变的变传动比模块。 2、包含Carsim完整数据库。 3、系统建模方法是动力学法 4、展示仿真结果图分别为角阶跃工况、双移线工况、汽车对应的响应曲线,并且与Carsim自带的机械转向对比图。
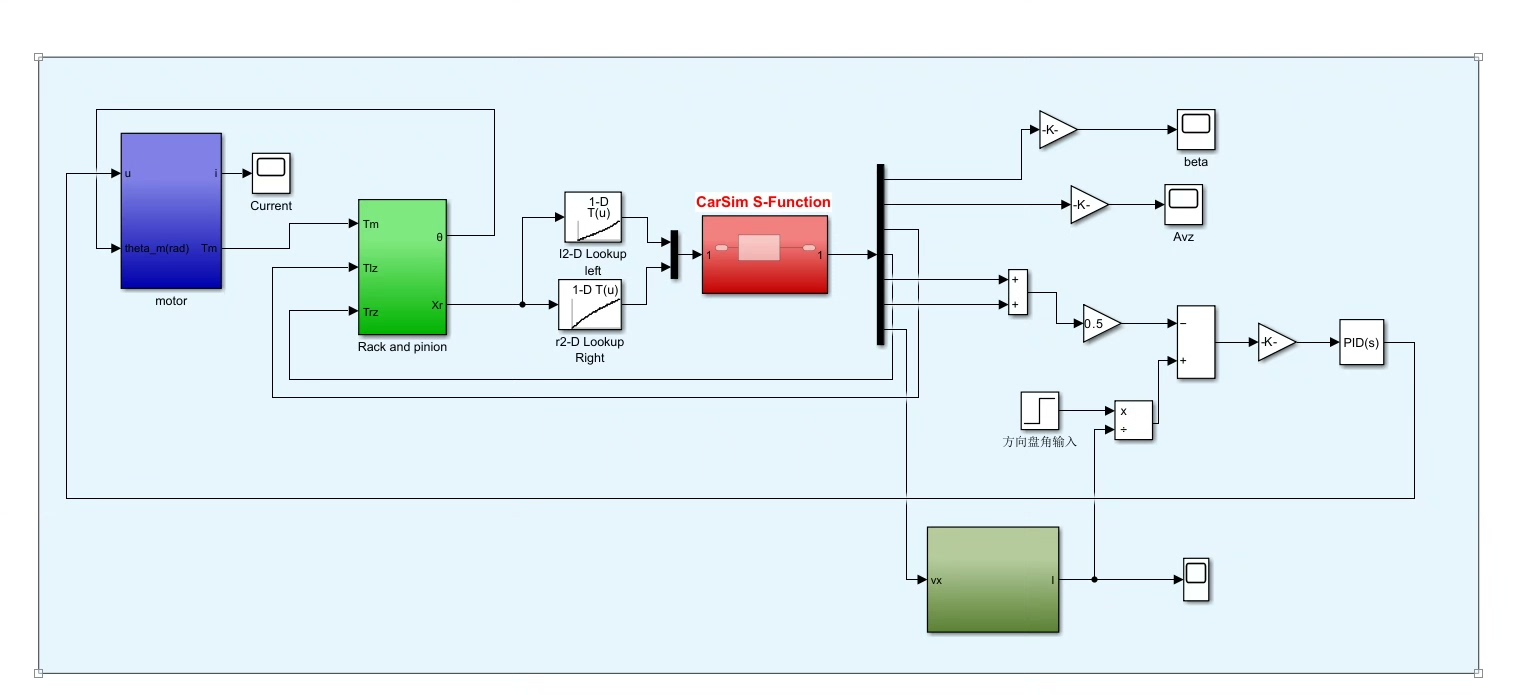
最近在研究线控转向系统,采用动力学法搭建了 Carsim 和 Simulink 的联合仿真模型,用的是 Carsim 2020 版本以及 Matlab 2019b 版本,来跟大家分享一下过程和成果。
变传动比模块
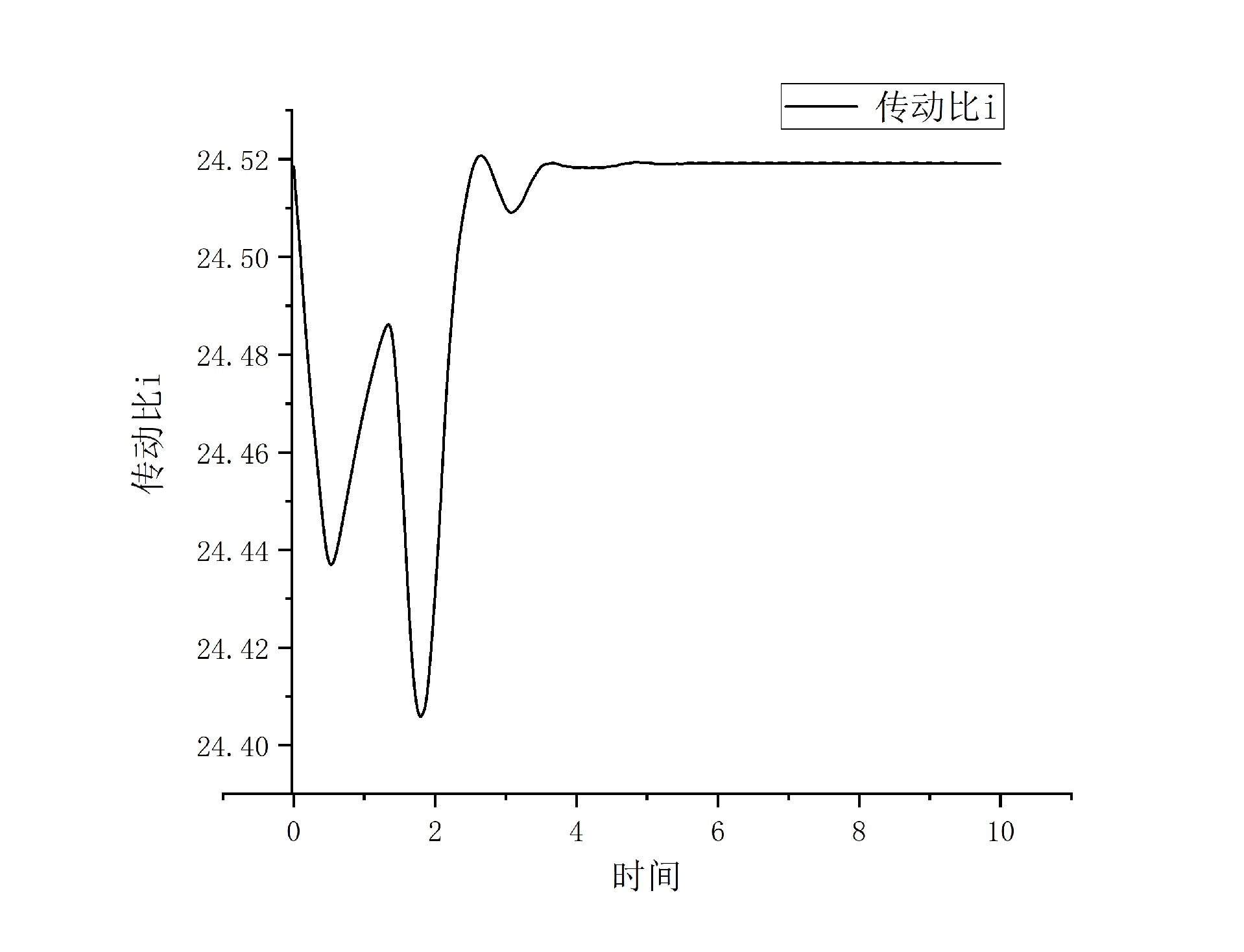
先来说说基于横摆角速度增益不变的变传动比模块。这个模块在整个线控转向系统里起着关键作用。简单来讲,传统的转向系统传动比是固定的,而在不同车速和驾驶工况下,固定传动比很难满足所有需求。变传动比模块就致力于解决这个问题,根据车辆行驶状态实时调整传动比,提升驾驶的稳定性和操控性。
在 Simulink 里搭建这个模块,核心代码片段大概是这样(以简单的车速与传动比关系为例):
function ratio = variable_ratio(speed)
if speed < 30
ratio = 15;
elseif speed >= 30 && speed < 60
ratio = 12 + (15 - 12) * (60 - speed) / 30;
else
ratio = 12;
end
end这段代码通过判断车速来确定传动比。车速较低时,较大的传动比能让转向更轻松,适合停车等低速操作;车速较高时,较小的传动比让转向响应更精准,保障高速行驶安全。这里只是简单示例,实际应用中会结合横摆角速度增益等更多复杂因素。
Carsim 完整数据库的运用
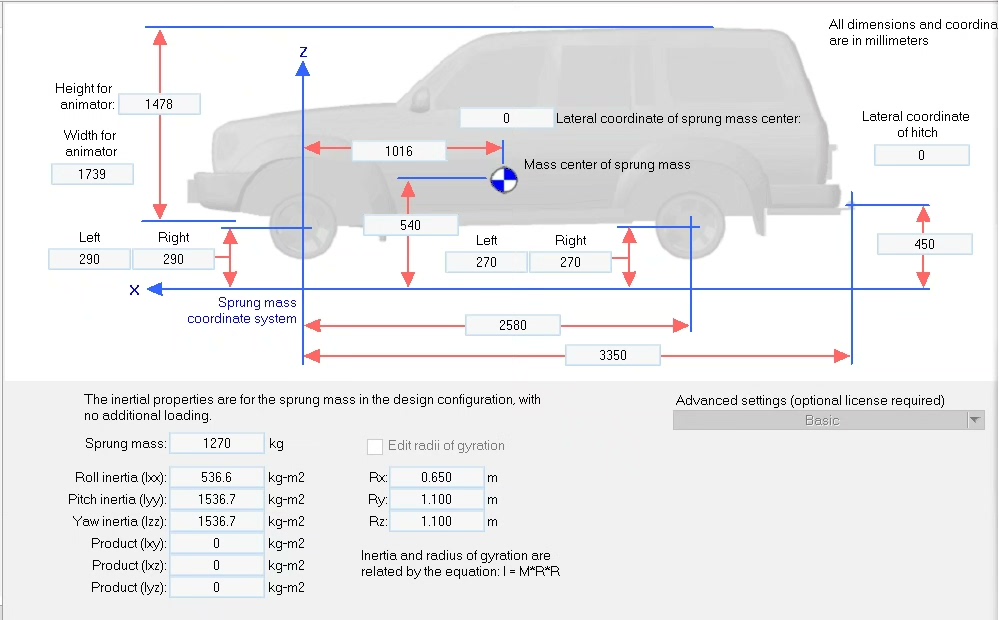
Carsim 完整数据库简直是个宝藏。它包含了各种车辆参数、路面状况等详细信息,为仿真提供了高度真实的基础数据。在联合仿真时,我们可以直接调用这些数据,大大减少了手动输入和参数校准的工作量。比如车辆的质量、轴距、轮胎特性等参数,都能在数据库里准确找到。这不仅节省时间,也提高了仿真模型的准确性和可靠性。
系统建模方法 - 动力学法
采用动力学法建模,是因为它能从本质上反映车辆的运动特性。动力学法基于牛顿力学定律,考虑车辆在行驶过程中的各种力和力矩,像轮胎与地面的摩擦力、转向系统的作用力等。通过建立一系列动力学方程来描述车辆的运动状态。以车辆的横摆运动为例,其动力学方程可以写成:

线控转向系统动力学法 Carsim和Simulink联合仿真模型 Carsim是2020版本,Matlab是2019b版本 1、一个基于横摆角速度增益不变的变传动比模块。 2、包含Carsim完整数据库。 3、系统建模方法是动力学法 4、展示仿真结果图分别为角阶跃工况、双移线工况、汽车对应的响应曲线,并且与Carsim自带的机械转向对比图。
\[Iz \ddot{\psi} = lf F{yf} - lr F_{yr}\]
其中 \(Iz\) 是车辆绕 z 轴的转动惯量,\(\ddot{\psi}\) 是横摆角速度,\(lf\) 和 \(lr\) 分别是车辆质心到前轴和后轴的距离,\(F{yf}\) 和 \(F_{yr}\) 是前后轮的侧向力。在 Simulink 中实现这些方程,就能够精确模拟车辆的横摆运动响应。
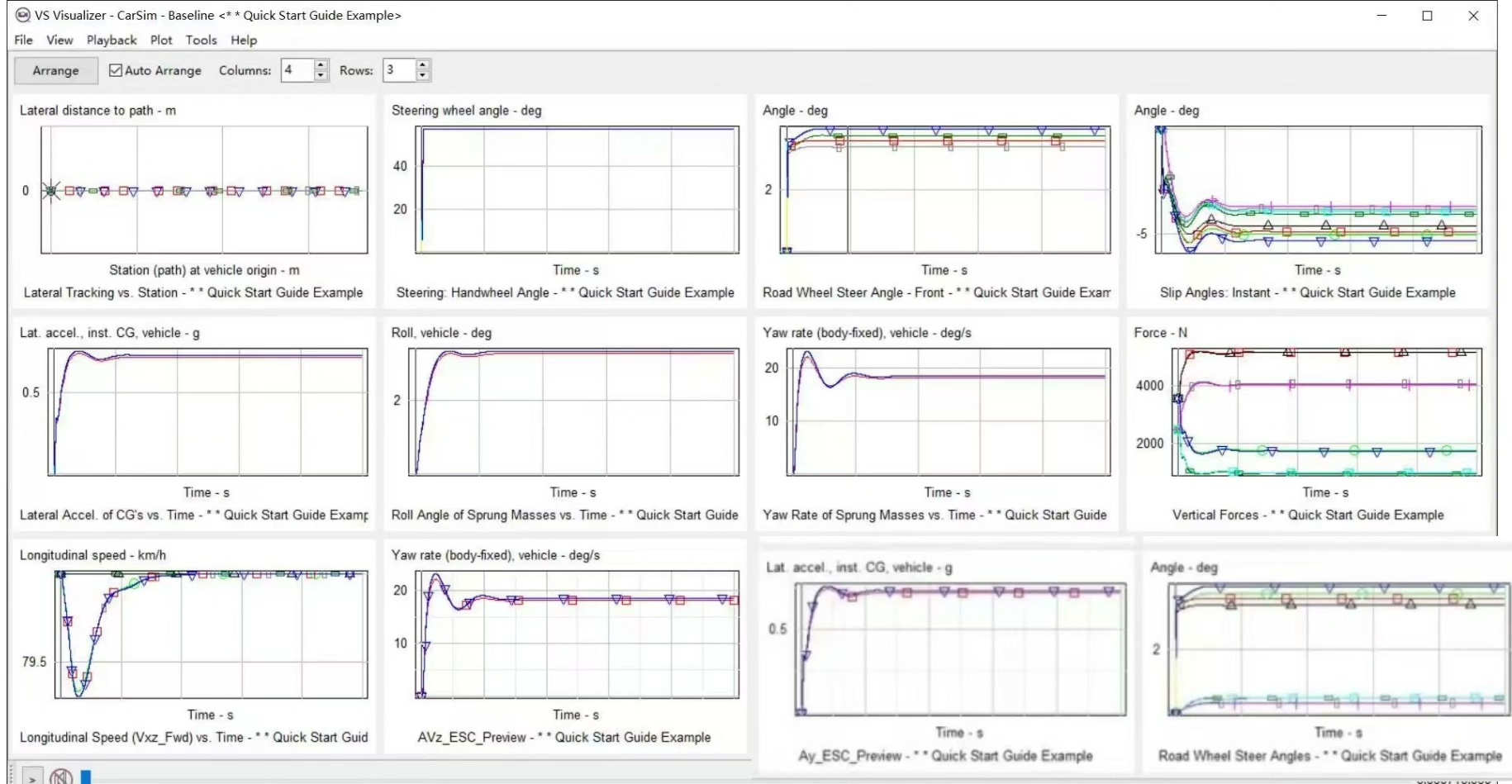
仿真结果展示
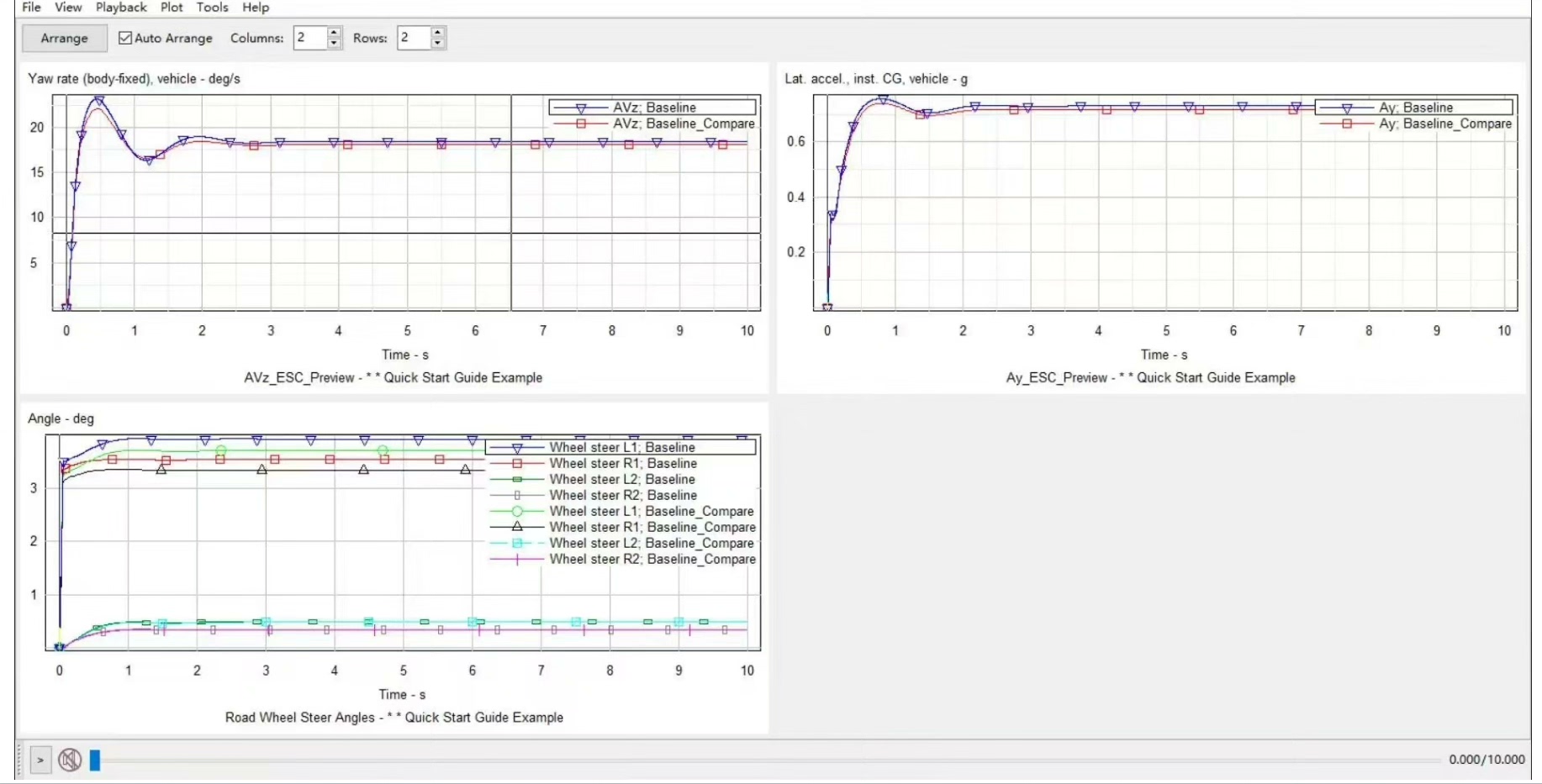
角阶跃工况
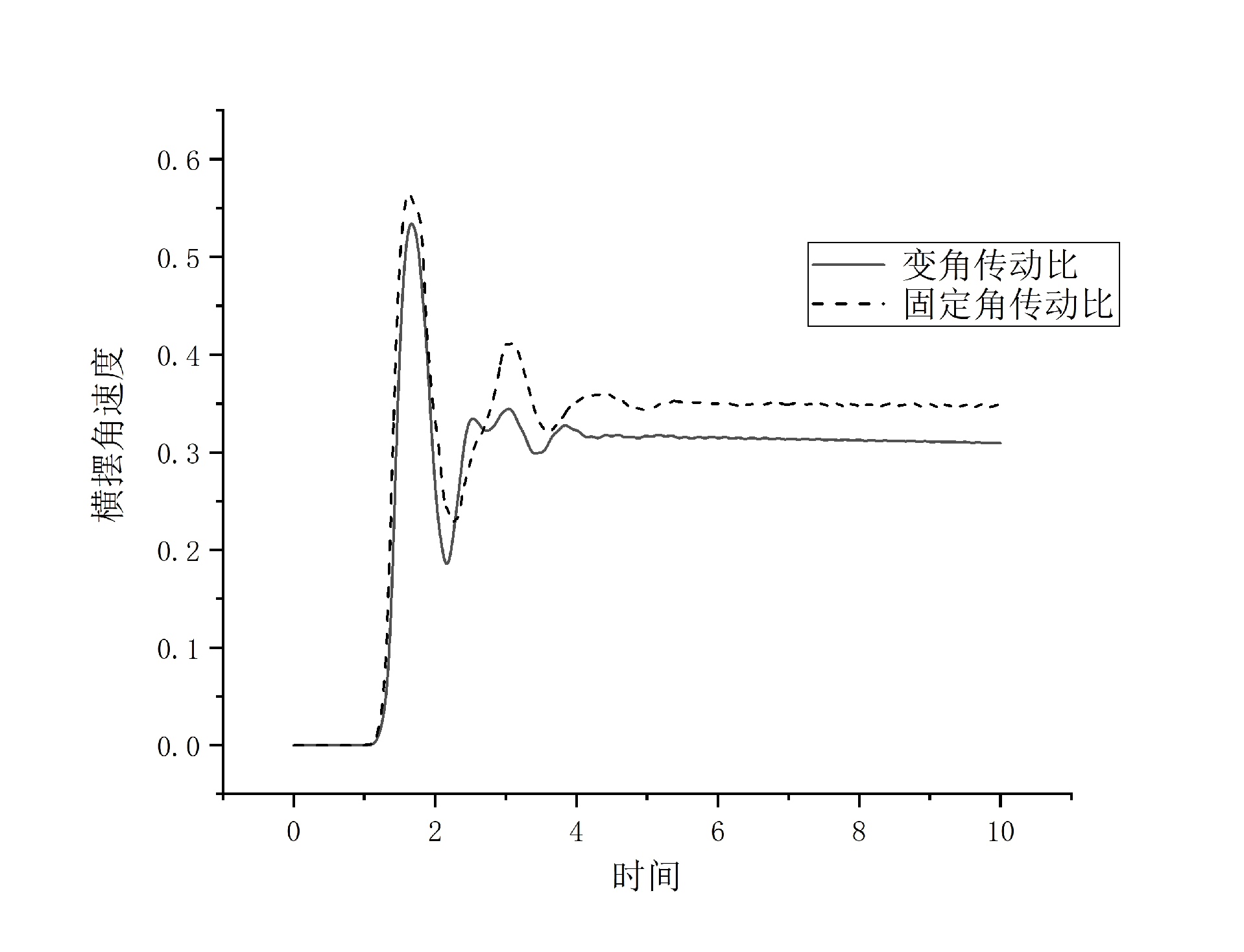
角阶跃工况下,我们给转向盘一个突然的角度输入,观察车辆的响应。从仿真结果图可以看到,线控转向系统的车辆响应曲线与 Carsim 自带机械转向的对比十分明显。线控转向系统由于变传动比模块的作用,在初始阶段横摆角速度的上升更为平缓,避免了车辆过于灵敏的响应,而在后续阶段又能快速达到稳定状态,提升了驾驶的舒适性和安全性。
双移线工况
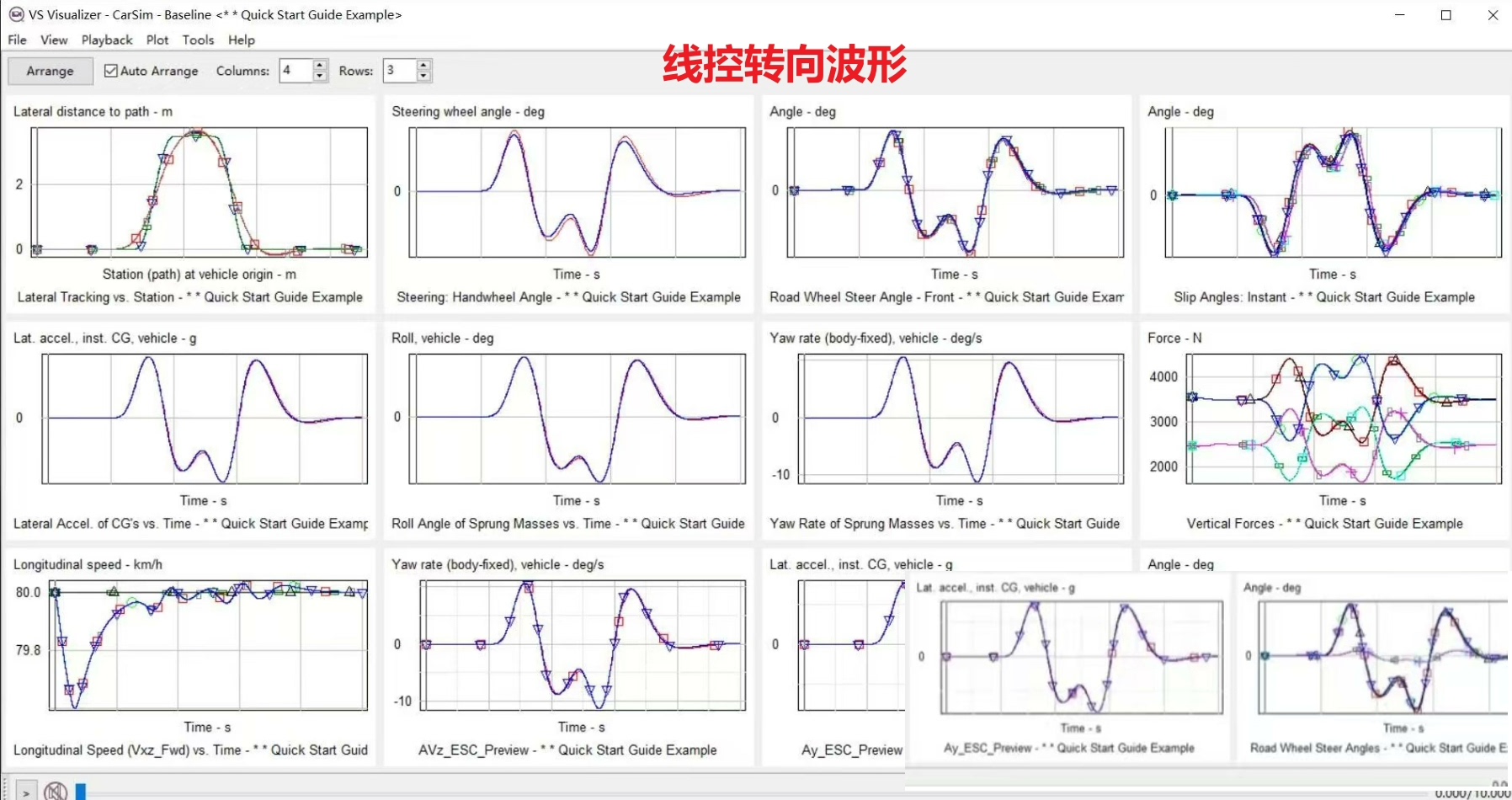
双移线工况更接近实际驾驶中的紧急避让场景。在这个工况下,线控转向系统能够更好地跟踪驾驶员的转向意图,车辆的轨迹更加平滑,相比 Carsim 自带机械转向,线控转向系统减少了车辆的横摆波动,展现出更好的操纵稳定性。
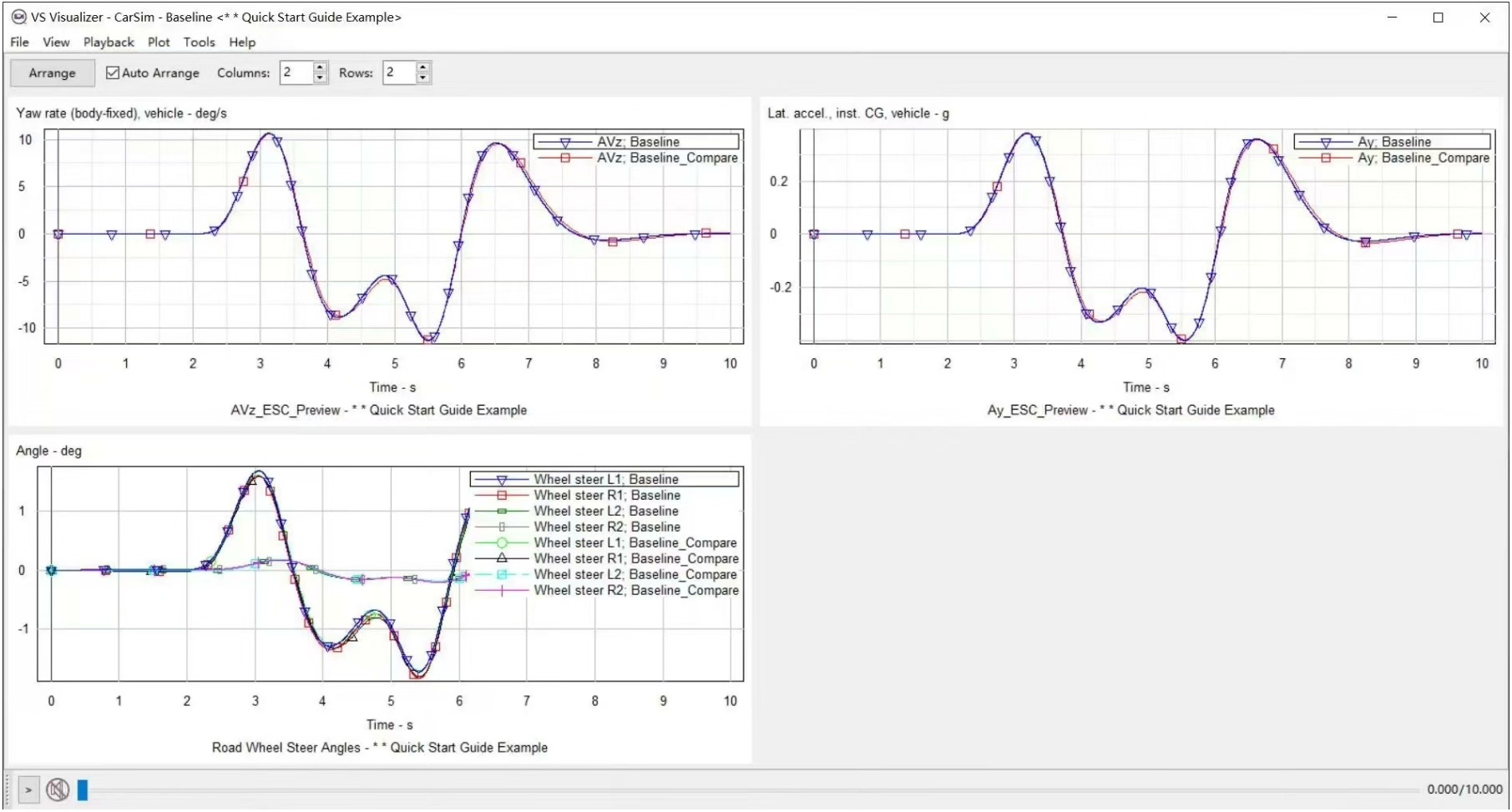
通过这些工况的仿真结果对比,可以清晰看到基于动力学法搭建的 Carsim 和 Simulink 联合仿真模型中线控转向系统的优势。这次探索不仅对理解线控转向系统有很大帮助,也为进一步优化车辆转向性能提供了方向。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)