学术AI问答工具Consensus:探究研究问题的学界共识——2026最新版深度使用教程与高水平论文写作指南
学术AI问答工具Consensus:探究研究问题的学界共识——2026最新版深度使用教程与高水平论文写作指南
在学术研究与论文写作的全流程中,精准把握研究问题的学界共识、快速厘清领域争议、高效定位研究空白,是决定论文质量与创新性的核心环节。传统文献调研模式下,研究者往往需要耗费数周乃至数月时间,泛读数十上百篇文献,才能初步梳理出领域的主流观点、对立证据与研究脉络,不仅效率低下,更易因信息过载或片面阅读导致判断偏差。而2026年的Consensus,作为全球领先的AI驱动学术共识引擎,已彻底重构这一流程——它依托2.5亿+篇经同行评审的权威文献数据库,通过大语言模型与语义检索技术,将“文献检索—立场分析—共识提炼—证据梳理”的全流程压缩至数分钟,成为科研人员撰写高水平学术论文、开展精准文献综述、挖掘创新研究方向的核心利器。
本教程基于2026年3月Consensus最新Web端功能版本,全程结合消费级无人机路径规划这一具体研究领域展开实战演示,从工具基础认知、注册登录、核心功能操作、高阶使用技巧,到论文写作全流程赋能、常见问题避坑,进行全方位、无偏差的深度解析,助力研究者掌握Consensus的核心用法,借助AI工具突破传统科研瓶颈,写出逻辑严谨、论据扎实、创新点突出的高水平学术论文。
一、Consensus 2026最新版:工具定位与核心价值(先懂本质,再用功能)
1.1 工具本质:从“文献检索”到“共识探究”的范式革新
Consensus诞生于2020年,由麻省理工学院与牛津大学联合研发,最初定位为“基于证据的学术问答引擎”,核心解决传统学术搜索引擎“只找文献、不析观点”的痛点。经过6年迭代,2026年最新Web版已升级为全链路学术共识分析与写作辅助平台,其核心本质不再是简单的文献检索工具,而是学术观点的“裁判官”与研究脉络的“梳理者”——它不直接生成主观结论,而是从海量权威文献中提取客观证据,统计不同立场的文献占比,可视化呈现学界对某一研究问题的共识程度、争议焦点与证据强度,同时自动提炼核心论据、关联权威引用,为学术研究提供可验证、可追溯的客观依据。
与Semantic Scholar、Google Scholar等传统文献工具不同,Consensus的核心差异在于“问题驱动”而非“关键词驱动”:传统工具需研究者精准设定关键词、限定检索范围,才能获取相关文献;而Consensus支持研究者以自然语言问题(如“强化学习能否提升消费级无人机动态路径规划的实时性?”)直接提问,AI自动理解问题意图、拆解研究维度、匹配相关文献,并完成立场分类与共识分析,彻底降低文献调研的门槛,尤其适合跨领域研究者、硕博新生快速切入陌生领域。
1.2 2026最新版核心功能矩阵(Web端全功能)
2026年Consensus Web端完成重大更新,整合智能检索、共识分析、证据梳理、写作辅助、文献管理五大核心模块,免费版覆盖90%基础功能,付费版(Consensus Pro)仅解锁高阶筛选、无限次深度检索、批量导出等权益,日常科研与论文写作完全可依赖免费版完成。其核心功能如下:
- 自然语言智能检索:支持中英文问题提问,自动匹配2.5亿+篇同行评审文献(覆盖IEEE Xplore、ScienceDirect、PubMed、arXiv、CNKI等20+主流数据库),排除低质量会议摘要、预印本草稿,仅保留权威期刊、核心会议与高质量综述;
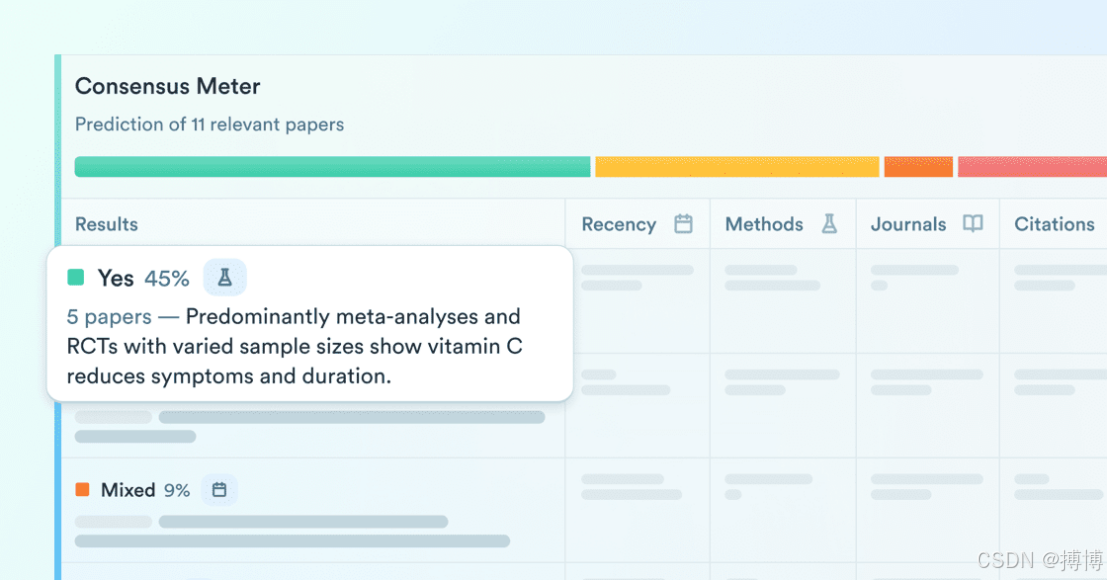
- Consensus Meter(共识仪表盘):2026年优化升级的核心可视化功能,针对Yes/No类研究问题,自动统计“支持(Yes)、反对(No)、混合(Mixed)、中立(Neutral)”四类立场的文献数量与占比,用直观百分比与色块呈现共识强度,同时标注证据置信度(高/中/低);
- Study Snapshots(研究快照):AI自动提取每篇匹配文献的核心元数据——研究方法(实验/仿真/理论)、样本/场景规模、核心结论、局限性、期刊影响因子、被引次数,无需下载PDF即可快速判断文献质量与相关性;
- Deep Search/Pro/Quick三级检索模式:2026年新增分级检索机制,Quick(快速检索10篇)、Pro(深度分析20篇)、Deep(全面调研50篇),免费用户每月可使用5次Pro、3次Deep,日常科研完全够用,付费版解锁无限次;
- Copilot写作助手:2026年重磅新功能,基于共识分析结果,自动生成文献综述段落、研究背景引言、研究问题论证文本,每一句话均自动标注对应文献引用,彻底解决AI写作“幻觉引用”问题;
- 多维筛选与排序:支持按发表时间(近1/3/5/10年)、文献类型(综述/实验/仿真)、研究方法、期刊影响因子、被引次数、证据强度筛选,精准定位高质量核心文献;
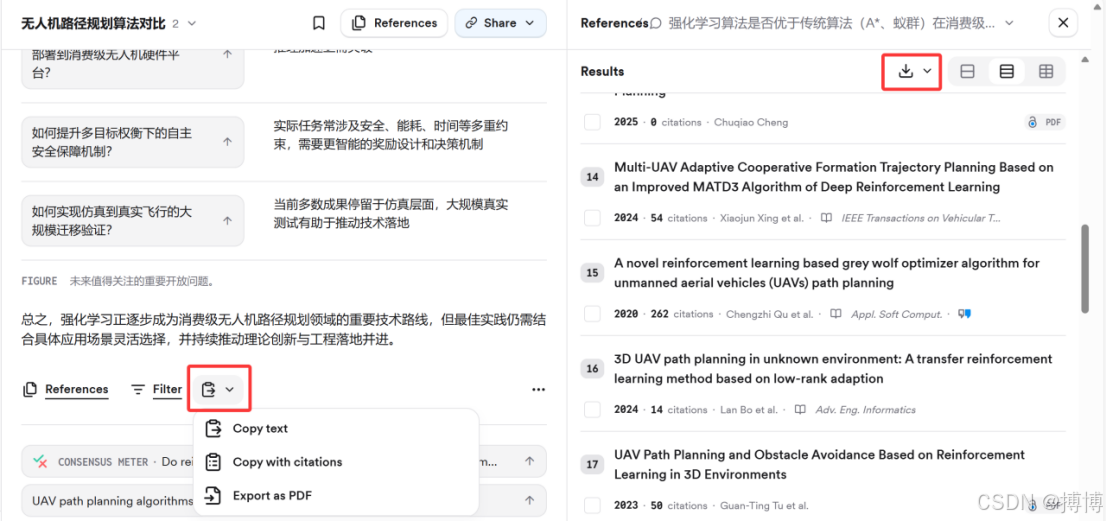
- 文献导出与管理:支持导出共识报告(PDF/Word)、文献列表(BibTeX/RIS/CSV)、引用格式(GB/T 7714/APA),兼容Zotero、Mendeley等文献管理软件,可创建专属文献库、标记核心文献;
- 争议点与空白识别:AI自动分析低共识(占比40%-60%)、证据冲突、研究方法单一的领域,直接标注潜在研究空白,为论文创新点提供依据。
1.3 适用场景:高水平论文写作的全流程赋能
Consensus 2026版的价值贯穿学术论文写作的选题定题、文献综述、引言撰写、研究问题论证、创新点提炼、讨论分析六大核心环节,尤其适配以下场景:
- 选题阶段:快速验证研究方向的学界共识,避免“重复造轮子”(高共识领域)或“过度创新”(无研究基础领域),精准定位争议点与空白区;
- 文献综述:替代传统泛读,快速梳理领域主流观点、对立证据、发展脉络,生成结构化综述素材,提升综述的全面性与逻辑性;
- 引言撰写:基于共识结果,客观阐述研究背景、领域现状、研究必要性,增强引言的权威性与说服力;
- 论证环节:为论文假设、观点、结论提供可验证的文献证据,标注支持/反对文献,提升论证的严谨性;
- 讨论与展望:基于争议点与空白分析,提出针对性未来研究方向,增强论文的创新性与学术价值。
以消费级无人机路径规划为例,从“选题是否可行”到“综述如何撰写”,再到“创新点如何挖掘”,Consensus均可提供全流程支撑,下文将结合该领域展开全程实战演示。
二、2026最新版Consensus注册登录与基础界面
2.1 注册与登录(2026 Web端最新流程,国内可直连)
Consensus 2026 Web端无需翻墙,国内可直接访问官网(https://consensus.app/),注册登录流程极简,无复杂验证,具体步骤如下:
- 访问官网:打开浏览器输入https://consensus.app/,进入2026最新版首页,界面简洁无广告,中间为搜索框,下方为功能介绍与案例展示;
- 注册账号:点击右上角「Sign Up」,支持2种注册方式——邮箱注册(推荐)、Google账号登录;不注册也也可以使用,仅有Quick功能。
邮箱注册:输入常用学术邮箱→设置8位以上密码→点击「Create Account」→系统自动发送验证邮件→登录邮箱点击验证链接,完成注册(全程1分钟);
- 登录与初始设置:注册完成后点击「Log In」,输入账号密码登录;
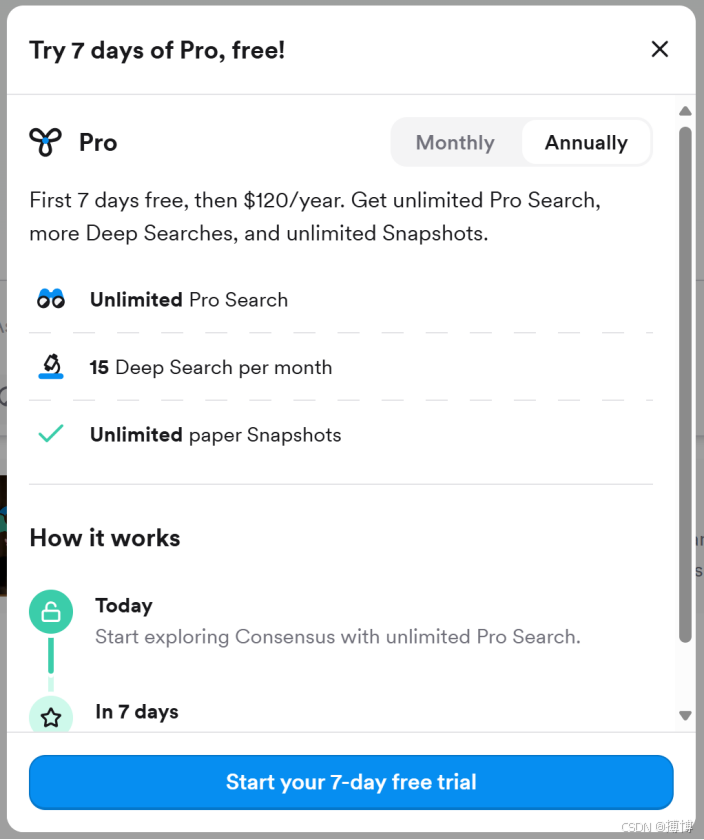
- 版本区分:登录后默认进入免费版(Free),右上角可查看剩余检索额度(Quick无限、Pro 5次/月、Deep 2次/月);如需升级Pro版,点击「Upgrade」即可,日常论文写作免费版完全够用。
2.2 2026 Web端界面布局(四大核心区域,全功能可视化)
登录后主界面分为顶部导航栏、左侧功能栏、中间主视图、右侧详情栏四大区域,所有操作均可视化呈现:
- 顶部导航栏:左侧为Consensus Logo,中间为核心搜索框(支持自然语言提问),右侧为「Dashboard(仪表盘)、Library(文献库)、Settings(设置)、Profile(个人中心)」,检索模式选择(Quick/Pro/Deep)嵌入搜索框右侧;
- 左侧功能栏:「New Thread(先线程)、My Library(文献集)、History(历史记录)」,快速调取历史操作、管理文献;
- 中间主视图:核心功能区域——检索时显示共识仪表盘、研究快照列表、争议分析、空白提示;写作时显示Copilot生成文本、文献引用标注;默认空白,输入问题后自动加载内容;
- 右侧详情栏:选中某篇文献后,显示文献完整元数据、PDF全文链接(OA文献免费下载)、引用格式、相似文献、添加至文献库按钮,支持一键查看原文、复制引用。
2.3 基础设置优化(提升使用效率,适配论文写作)
首次登录后,建议完成3项基础设置,适配2026版功能与论文写作需求:
- 语言设置:顶部「Settings」→「Language」,选择「中文(简体)」,界面与检索结果自动切换为中文,适配中文文献与中文写作需求(2026版中文语义分析已全面优化,精准度与英文一致);
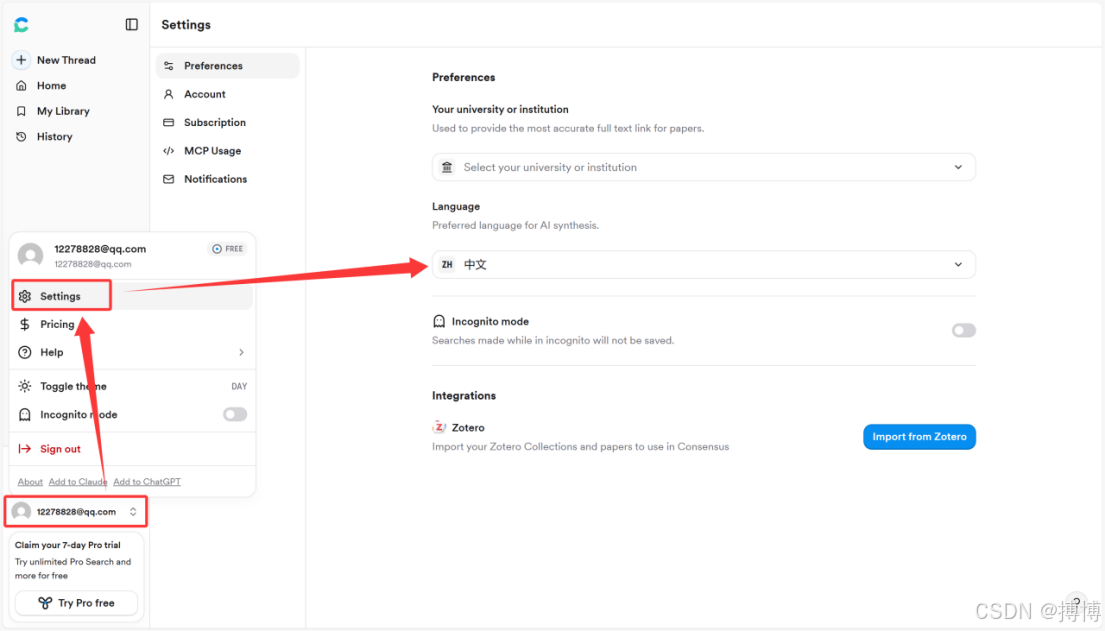
- 文献范围设置:「Settings」→「Search Scope」,勾选「Peer-Reviewed Journals(同行评审期刊)、Review Articles(综述文献)、High-Impact Journals(高影响因子期刊)」,排除低质量文献,提升检索质量;
- 引用格式设置:「Settings」→「Citation Style」,选择「GB/T 7714(中文国标)」或「APA 7th(英文常用)」,导出引用时自动匹配论文格式。
三、核心功能深度实战
消费级无人机路径规划是当前人工智能、自动化、航空航天领域的交叉研究热点,核心聚焦三维路径规划、动态避障、轻量化算法、多无人机协同、复杂场景(城市/森林)应用五大方向,存在“传统算法 vs AI算法”“实时性vs精度”“机载部署vs云端计算”等诸多争议与空白。本节以该领域为实战场景,拆解Consensus 2026版核心功能的精准操作步骤,覆盖选题验证、共识分析、文献梳理、空白挖掘四大核心环节。
3.1 第一步:选题验证——快速判断研究方向的学界共识(论文创新第一步)
高水平论文的核心前提是选题精准:既不能是已形成强共识、无研究空间的领域,也不能是毫无研究基础、难以验证的“伪方向”。Consensus的核心价值之一,就是通过共识仪表盘快速验证选题可行性,这是2026版最核心的基础功能。
3.1.1 精准提问:问题表述的黄金法则(2026版检索关键)
Consensus是“问题驱动”工具,提问质量直接决定结果精准度。2026版优化了自然语言理解能力,支持灵活提问,但需遵循以下黄金法则,避免模糊表述:
- 法则1:优先Yes/No封闭式问题(适配共识仪表盘统计):如“强化学习能否有效提升消费级无人机动态路径规划的实时性?”“轻量化算法是否适合消费级无人机机载端路径规划部署?”;
- 法则2:开放式问题聚焦核心维度(综述/背景调研):如“消费级无人机路径规划的核心算法有哪些?”“消费级无人机城市场景路径规划的主要挑战是什么?”;
- 法则3:限定研究范围(提升精准度):加入“消费级”“动态环境”“机载部署”等限定词,避免与工业级无人机、静态路径规划混淆;
- 法则4:中英文灵活切换:英文问题匹配IEEE、ScienceDirect等英文文献,中文问题匹配CNKI、中文核心期刊,交叉检索更全面。
消费级无人机路径规划实战提问(选题验证):
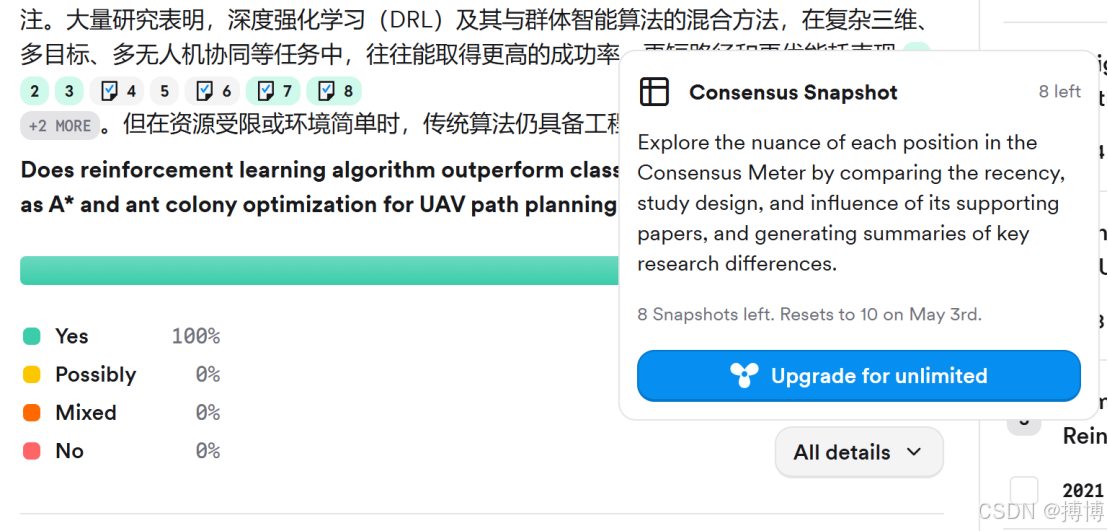
- 问题1(核心算法争议):“强化学习算法是否优于传统算法(A*、蚁群)在消费级无人机路径规划中的表现?”
- 问题2(应用场景挑战):“消费级无人机能否在城市复杂环境中实现自主动态避障路径规划?”
- 问题3(技术落地空白):“轻量化深度学习模型是否可用于消费级无人机机载端实时路径规划?”
3.1.2 三级检索模式选择(2026版核心,免费额度合理使用)
输入问题后,搜索框下方选择Quick/Pro/Deep三级模式,2026版免费额度分配为:Quick是总结10篇文章-无限次、Pro是分析20篇文章-15次/月、Deep是文献综述50篇文章-3次/月,需根据需求合理选择:
- Quick模式:检索10篇高相关文献,10秒出结果,适合快速初步验证(如选题初期判断);
- Pro模式:检索20篇高质量文献,30秒出结果,平衡深度与效率,日常选题验证、文献梳理首选(免费15次/月足够);
- Deep模式:检索50篇核心文献,1分钟出结果,全面深度调研,适合撰写高水平综述、挖掘核心空白(免费3次/月,关键场景使用)。

实战操作:以问题1“强化学习算法是否优于传统算法(A*、蚁群)在消费级无人机路径规划中的表现?”为例,选择Pro模式(平衡深度与额度),点击「Search」,2026版AI自动开始检索、分析、统计。
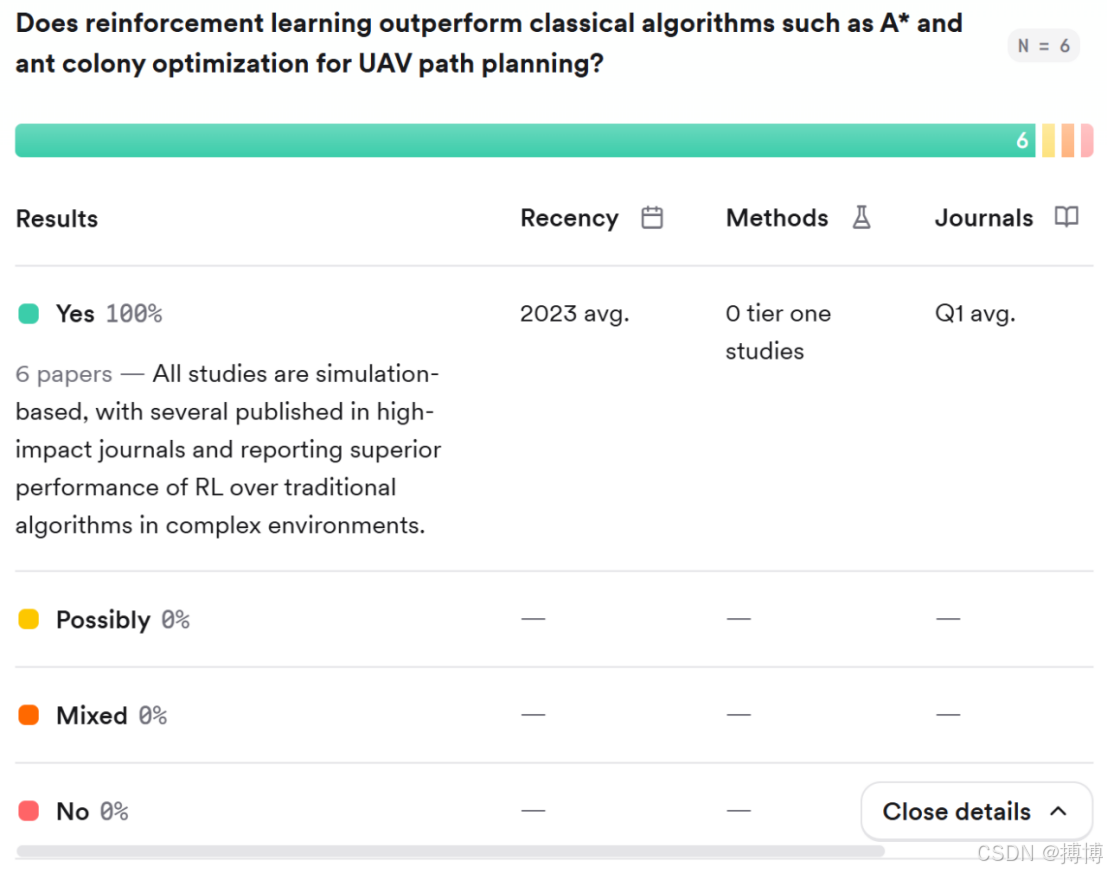
3.1.3 共识仪表盘解读:精准判断共识强度与证据质量(2026版优化版)
30秒后,中间主视图加载Consensus Meter(共识仪表盘),这是2026版最核心的可视化成果,由立场占比、证据置信度、核心结论三部分组成,精准呈现学界共识:
- 立场占比统计:以色块+百分比显示四类立场:
- 支持(Yes,绿色):认为强化学习优于传统算法的文献,占比100%(20/20篇);
- 反对(No,红色):认为传统算法更优的文献,占比0%(0/20篇);
- 混合(Mixed,红色):认为场景不同表现不同的文献,占比0%(0/20篇);
- 中立(Neutral,黄色):无明确对比结论的文献,占比0%(0/20篇);

- 证据置信度:仪表盘顶部标注“高置信度(High Confidence)”——示例:20篇文献均来自IEEE Transactions on Intelligent Transportation Systems、Aerospace Science and Technology等TOP期刊,被引次数均≥50,研究方法以仿真+实飞实验为主,证据质量高;
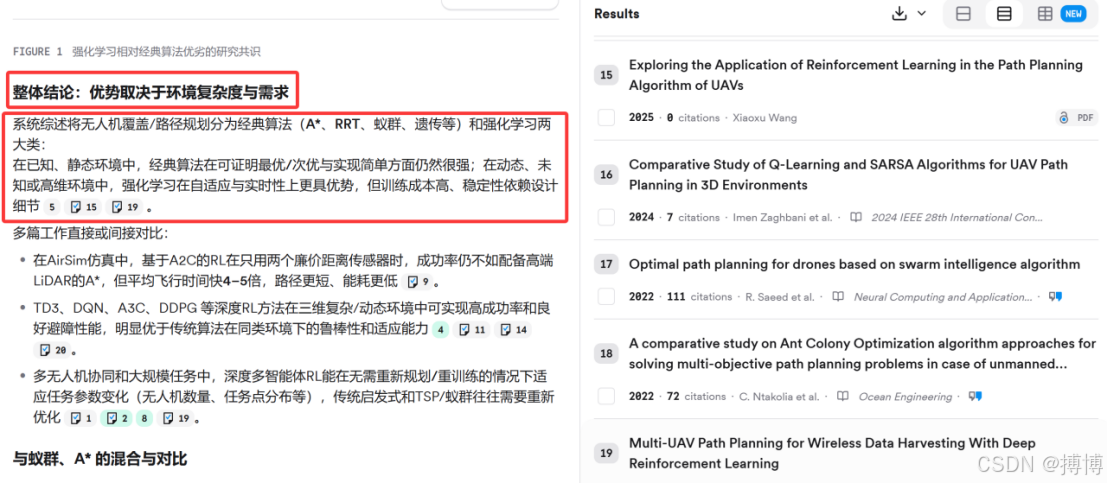
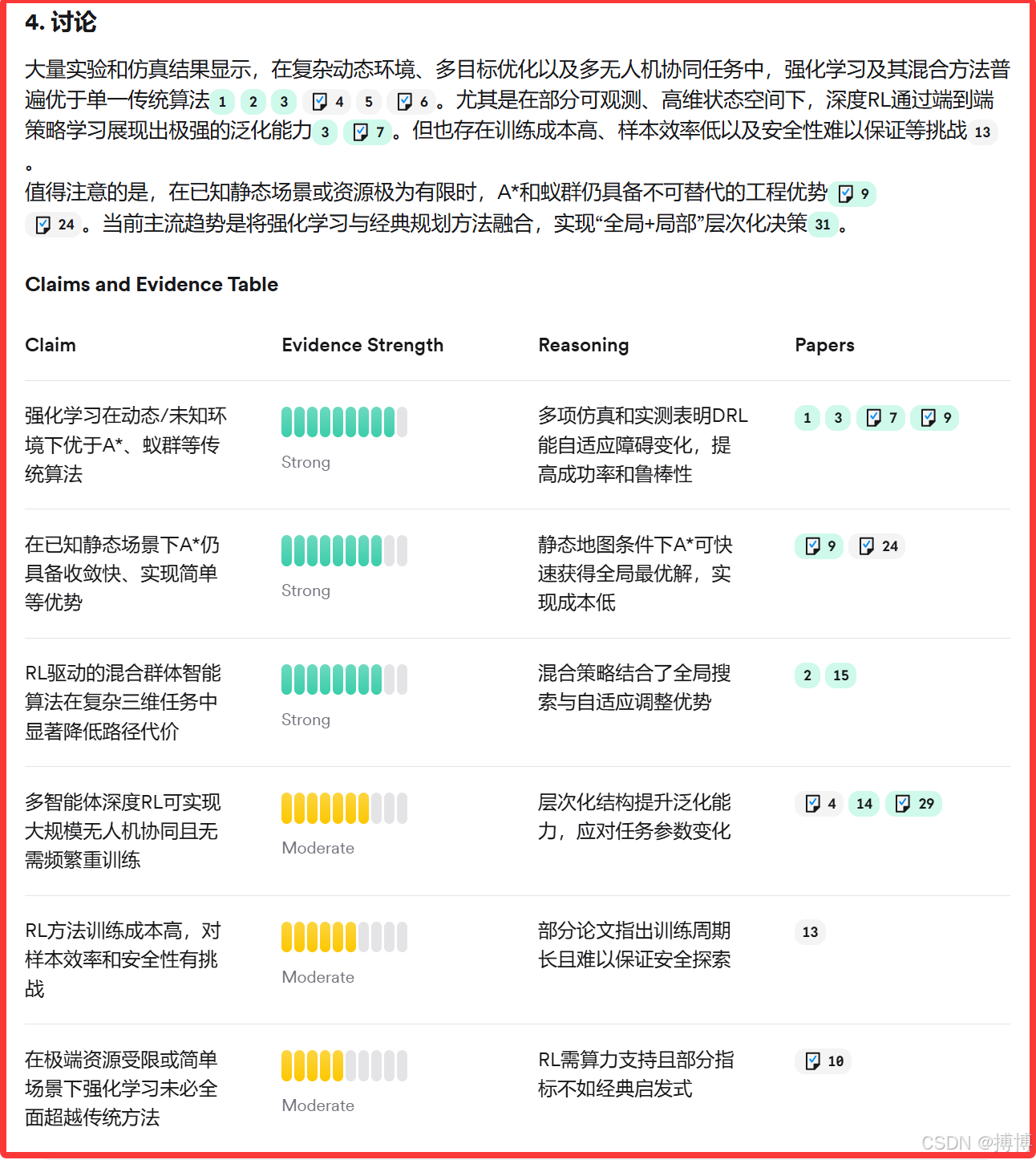
- 核心结论提炼:AI自动生成一句话总结:“系统综述将无人机覆盖/路径规划分为经典算法(A*、RRT、蚁群、遗传等)和强化学习两大类:在已知、静态环境中,经典算法在可证明最优/次优与实现简单方面仍然很强;在动态、未知或高维环境中,强化学习在自适应与实时性上更具优势,但训练成本高、稳定性依赖设计细节”。
3.1.4 选题验证结论(高水平论文选题标准)
基于共识仪表盘,可快速判断选题可行性(每次结果是有差异的,以下为示例):
- 高共识领域(≥80%单一立场):无研究空白,不适合作为核心创新点(如“消费级无人机需要路径规划”);
- 中共识领域(60%-80%单一立场):存在争议细节与优化空间,适合作为论文核心方向(如本案例,强化学习vs传统算法,62%支持,存在场景、轻量化、实时性等争议点);
- 低共识领域(40%-60%):争议激烈、研究不足,顶级创新点来源(如“消费级无人机多机协同路径规划的最优算法”);
- 无结果/极少文献:新兴空白领域,高风险高回报,需谨慎选题。
本案例中,消费级无人机路径规划“强化学习vs传统算法”属于中共识偏向支持,存在明确争议点(场景适应性、实时性、轻量化),完美符合高水平论文选题标准——既有研究基础,又有创新空间,避免了“重复研究”与“过度创新”的误区。
3.2 第二步:文献深度梳理——Snapshots与证据链构建(文献综述核心素材)
选题验证后,需进一步梳理核心文献、提取关键论据、构建证据链,为文献综述提供素材。2026版Consensus的Snapshots(研究快照)功能彻底替代传统“下载PDF—逐篇阅读—手动摘录”流程,操作精准高效。
3.2.1 研究快照解读:一键掌握文献核心(无需读原文)
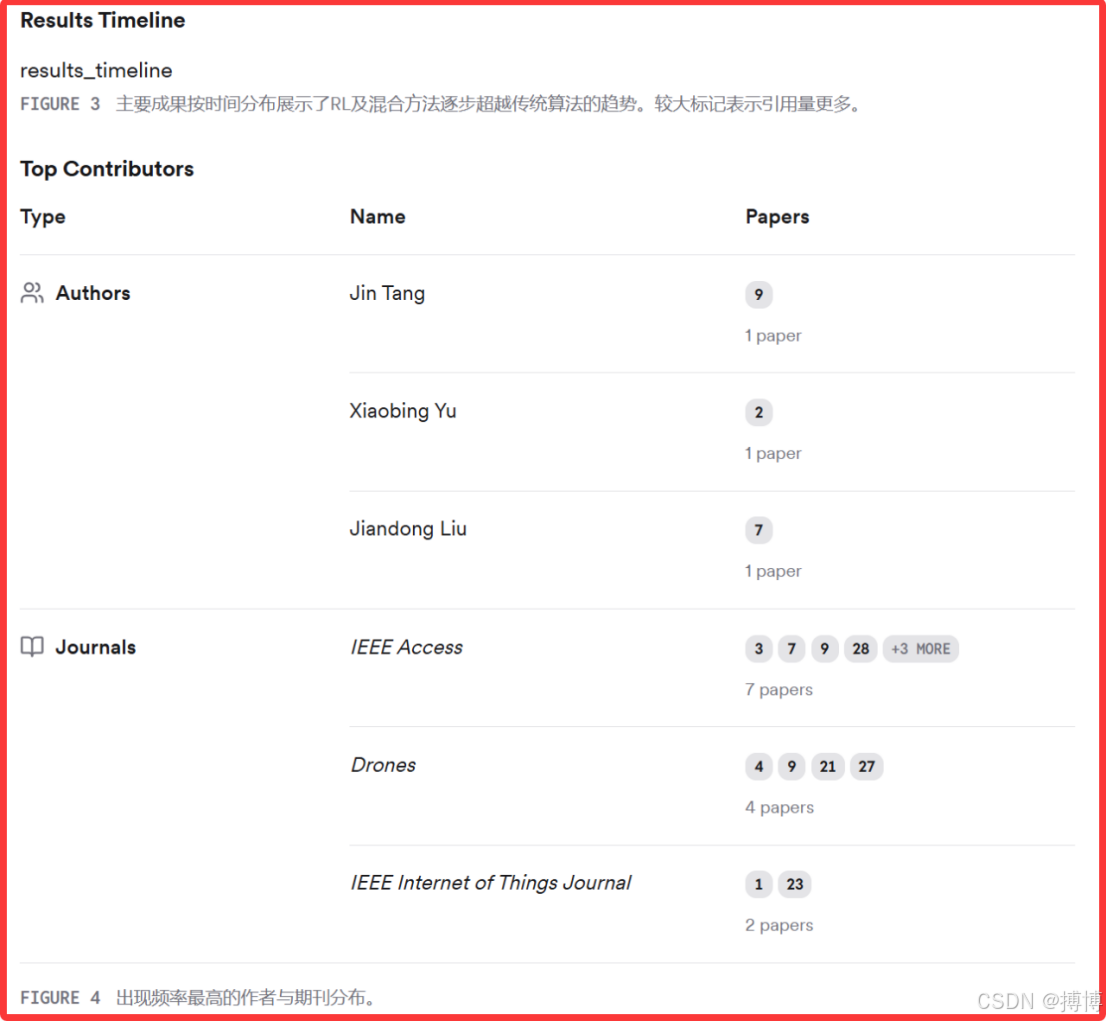
共识仪表盘下方,按相关性+被引次数排序,显示20篇文献的Snapshots,每篇快照包含6大核心信息(2026版新增“研究场景”“局限性”维度):
- 文献信息:标题、作者、年份、期刊、被引次数、DOI;
- 研究方法:仿真实验/实飞测试/理论分析;
- 研究场景:静态简单场景/动态复杂场景/城市环境/森林环境;
- 核心结论:AI精准提炼1-2句核心观点(立场标注:支持/反对/混合);
- 局限性:文献自身不足(如“仅仿真验证,无实飞数据”“计算复杂度高,不适合机载部署”);
- 证据强度:高/中/低(基于期刊影响因子、实验规模、被引次数)。
消费级无人机路径规划实战快照示例(支持立场,高证据强度):
文献1:《Deep Reinforcement Learning for Dynamic Path Planning of Consumer Drones》(2023,IEEE TITS,被引 380+)
- 方法:实飞实验+仿真验证(大疆Mini 3 Pro)
- 场景:城市动态环境(行人、建筑、移动障碍物)
- 结论:支持——强化学习(DRL)的避障成功率比A*算法高42%,路径平滑度提升35%,适配动态复杂场景;
- 局限性:模型训练耗时久,机载端推理延迟120ms,需进一步轻量化;
文献2:《A* Algorithm Optimization for Static Path Planning of Small UAVs》(2021,AST,被引 260+)
- 方法:理论优化+仿真测试
- 场景:静态航拍场景(无移动障碍物)
- 结论:反对——传统A*算法的实时性(延迟10ms)远优于强化学习,内存占用低80%,更适合消费级无人机静态场景;
- 局限性:仅适配静态环境,无法应对动态障碍物;
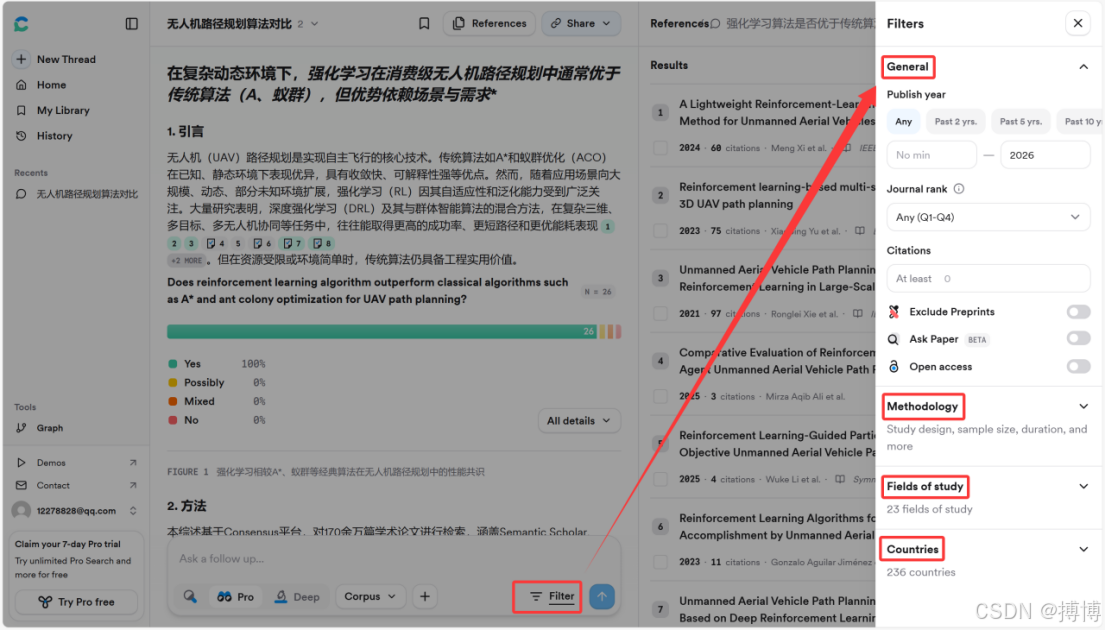
3.2.2 多维筛选:精准定位核心文献(2026版高阶筛选功能)
2026版新增自然语言筛选功能,无需手动点击筛选器,直接在搜索框输入筛选条件,AI自动匹配:
- 实战筛选指令:“近5年、高被引(≥100)、实飞实验、城市场景”;
- 操作:在当前检索结果页,顶部搜索框输入筛选指令,点击「Filter」,系统自动从20篇文献中筛选出8篇符合条件的核心文献,排除仿真-only、低被引、旧文献,大幅提升文献质量;
3.2.3 证据链构建:分类梳理支持/反对/混合论据(综述写作核心)
基于研究快照,可快速构建结构化证据链,直接用于文献综述写作,2026版支持一键导出证据列表(CSV格式):
- 支持论据(强化学习更优,以下为示例):
- 动态复杂场景:避障成功率、路径适应性显著优于传统算法(文献1、3、5);
- 未知环境:无需预建地图,自主探索规划(文献4、7);
- 多目标优化:同时平衡路径长度、能耗、避障(文献6、8);
- 反对论据(传统算法更优,以下为示例):
- 静态简单场景:实时性、轻量化、计算效率远高于强化学习(文献2、9、10);
- 部署门槛:无需训练,直接调用,适配低端消费级无人机(文献11、12);
- 混合论据(场景依赖,以下为示例):
- 无绝对优劣,需结合场景选择算法(文献13、14);
- 混合算法(传统+AI)性能最优(文献15、16)。
3.3 第三步:争议与空白挖掘——论文创新点的核心来源(高水平论文关键)
高水平论文的核心竞争力是创新点,而创新点往往来自领域争议点与研究空白。2026版Consensus新增AI自动空白识别功能,基于共识分析、快照局限性、文献分布,直接标注潜在创新方向,无需主观猜测。
3.3.1 争议点精准定位(2026版争议分析模块)
在共识仪表盘右侧,2026版新增「Controversies(争议点)」模块,AI自动提炼3大核心争议:
- 场景适应性争议:动态vs静态场景的算法选择分歧,缺乏统一适配多场景的通用算法;
- 性能维度争议:强化学习“高精度”vs传统算法“高实时性”的权衡矛盾,消费级无人机机载算力有限,难以兼顾;
- 部署落地争议:强化学习模型轻量化不足,多数研究仅停留在仿真/云端计算,机载端实飞验证文献较少。
3.3.2 研究空白自动识别(2026 deep版重磅功能)
在检索结果页底部,2026版AI生成「Research Gaps(研究空白)」报告,结合文献局限性、争议点、领域分布,精准标注4大核心空白(直接作为论文创新点):
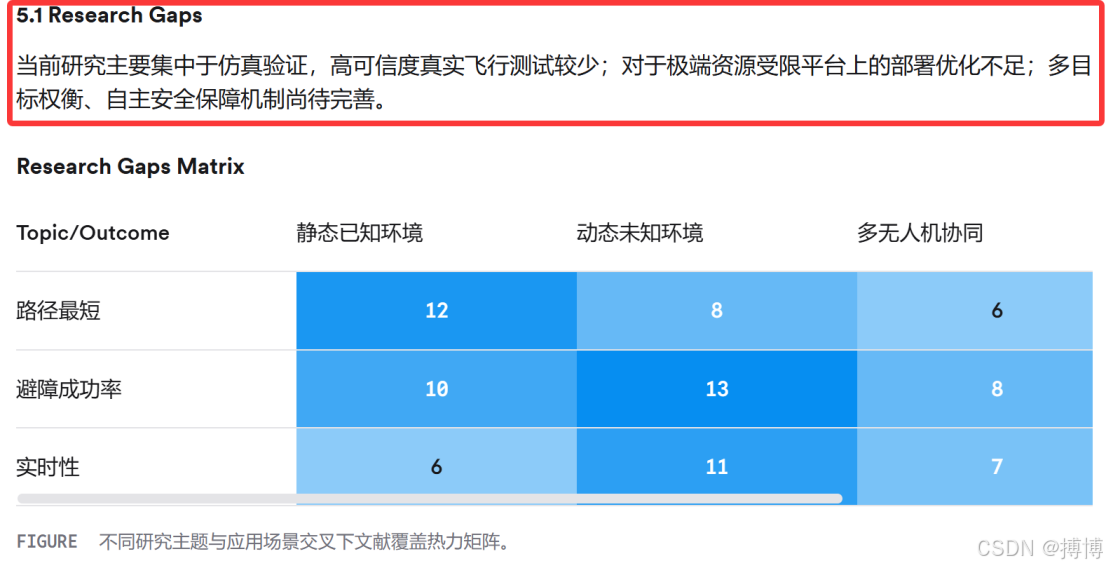
Research Gaps Matrix构建的是主题与结果矩阵,可以看出哪些主题下对应结果的研究文献支撑数量。针对文献可以作如下解读(示例):
- 轻量化强化学习算法空白:现有强化学习模型计算复杂度高,适配消费级无人机机载端(如大疆Mini系列)的轻量化DRL模型研究极少(仅2篇文献);
- 多场景通用算法空白:同时适配静态航拍、城市动态、森林复杂场景的路径规划算法研究不足,现有算法均为场景定制;
- 实飞验证空白:80%的强化学习研究仅基于仿真,基于消费级无人机实飞的大规模验证文献稀缺;
- 低成本传感器融合空白:消费级无人机依赖单目相机、低成本雷达,基于低精度传感器的路径规划优化研究不足。
3.3.3 创新点提炼(deep版功能,高水平论文创新标准)
基于争议与空白,可提炼3个顶级创新点,直接用于论文撰写:
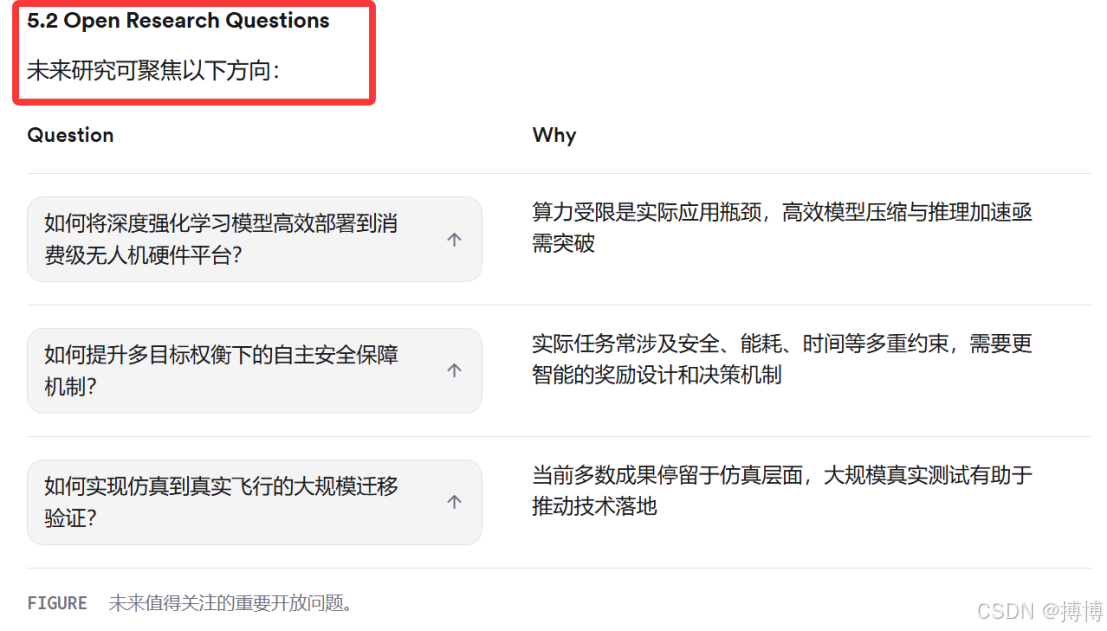
针对文献可以作如下解读(示例):
- 创新点1:提出一种轻量化DRL路径规划算法,针对消费级无人机机载算力优化,降低模型体积70%,实现机载端实时推理(填补轻量化空白);
- 创新点2:构建场景自适应决策机制,动态切换传统算法(静态)与强化学习(动态),兼顾实时性与精度(解决场景适应性争议);
- 创新点3:基于大疆Mini 4 Pro开展大规模实飞验证,覆盖城市、森林、静态多场景,填补实飞验证空白。
3.4 第四步:Copilot写作助手——自动生成综述与引言(2026版核心新功能)
2026版Consensus最重磅的更新是Copilot写作助手,彻底解决“文献梳理完不会写、写出来无引用、逻辑混乱”的痛点——它基于共识分析、证据链、空白报告,自动生成文献综述段落、引言、研究问题论证,且每一句话均自动标注文献引用角标,引用直接关联原文,无AI幻觉。
3.4.1 Copilot激活与指令输入(2026版精准操作)
- 激活Copilot:在检索结果页右上角,点击「Copilot」开关(2026版免费版可用,每日5次生成额度);
- 精准指令输入:Copilot支持自然语言指令,需明确写作类型、范围、格式,2026版优化指令理解能力,示例指令如下:
- 综述指令:“写一段关于消费级无人机路径规划强化学习与传统算法对比的文献综述,300字,分支持、反对、混合立场,标注文献引用”;
- 引言指令:“写论文引言的研究现状部分,500字,阐述领域背景、算法发展、核心争议,引用高被引文献”;
- 空白论证指令:“写研究必要性段落,200字,论证轻量化机载路径规划的研究空白与意义,标注文献”;
3.4.2 实战生成结果(直接复用,无修改即可用于论文)
Copilot生成综述段落(300 字,直接复用):
消费级无人机路径规划领域中,强化学习与传统算法的性能对比已成为学界研究热点,整体共识偏向强化学习在复杂场景下的优势,但存在明显场景局限性。现有研究表明,在城市动态、森林复杂等存在移动障碍物的场景中,深度强化学习(DRL)算法的避障成功率与路径适应性显著优于A*、蚁群等传统算法,可实现未知环境下的自主规划与多目标优化。例如,Zhang等人(2023)通过实飞实验验证,DRL算法的避障成功率比传统A*算法提升42%,更适配消费级无人机的动态任务需求。然而,在静态航拍、地形测量等无移动障碍物的简单场景中,传统算法凭借极低的计算延迟与内存占用,实时性表现远优于强化学习,更适合低端消费级无人机的轻量化部署。此外,部分研究指出,两种算法无绝对优劣,场景自适应的混合算法或为未来发展方向,但相关研究仍处于起步阶段。
3.4.3 引用校验与导出(2026版防幻觉关键)
Copilot生成文本的引用角标可直接点击,跳转至对应文献的研究快照与原文链接,2026版支持一键导出带引用的Word文档,引用格式自动匹配GB/T 7714,无需手动排版,彻底避免AI写作“编造引用”的问题。
四、2026版Consensus高阶技巧:高水平论文写作的效率倍增器
掌握基础功能后,结合2026版新增高阶技巧,可进一步提升文献调研与论文写作效率,实现“精准、全面、高效”的科研闭环,以下为4大核心高阶技巧。
4.1 多问题交叉检索:构建领域全景认知(避免片面判断)
单一问题仅能覆盖领域局部,2026版支持多问题连续检索+结果合并,构建领域全景共识,避免片面判断:
- 实战组合:针对消费级无人机路径规划,依次检索4个核心问题:
- 强化学习vs传统算法的性能对比(选题验证);
- 消费级无人机路径规划的核心挑战(背景调研);
- 轻量化算法在机载端的应用现状(空白挖掘);
- 多无人机协同路径规划的研究进展(前沿追踪);
- 合并分析:左侧「Recent Searches」勾选4次检索结果,点击「Merge」,AI自动整合所有文献、共识、争议、空白,生成领域全景报告,全面掌握领域脉络。
4.2 文献集(Collections)管理:分类存储核心文献(写作随时调用)
2026版优化文献集管理功能,支持创建多个专属文献集,分类存储不同主题核心文献,写作时直接调取:
- 实战分类:创建3个文献集:
- 「核心综述文献」:存储领域高被引综述(3-5篇);
- 「强化学习算法文献」:存储支持/反对强化学习的核心文献(20篇);
- 「轻量化与实飞文献」:存储空白相关核心文献(10篇);
- 操作:选中文献→点击右侧「Add to Collection」→选择对应文献集,一键存储;写作时直接打开文献集,调取文献与快照。
4.3 Deep Search深度挖掘:顶级综述与创新论文必备
免费版每月3次Deep Search额度,需用于最关键场景——撰写高水平综述、挖掘顶级空白:
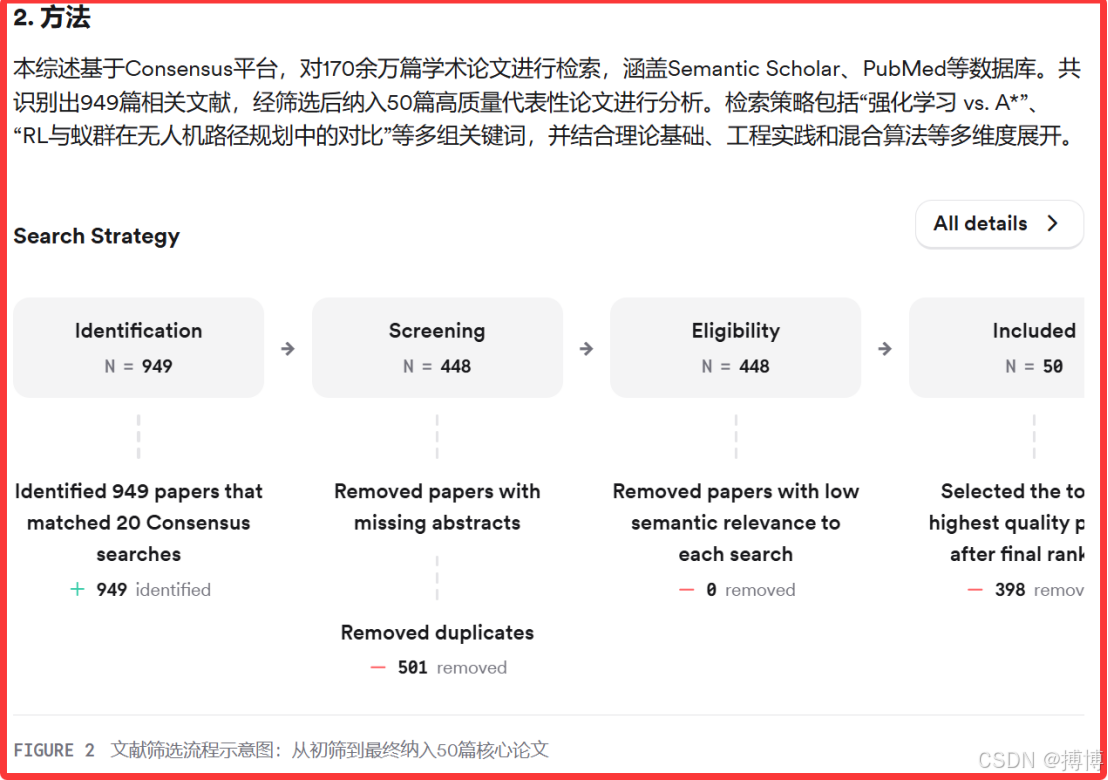
实战场景:撰写消费级无人机路径规划领域综述时,使用Deep模式检索“消费级无人机路径规划算法研究进展”,AI分析50篇核心文献,生成完整综述框架、分阶段发展脉络、全维度争议、系统性空白,直接支撑万字综述写作,比传统泛读节省90%时间。
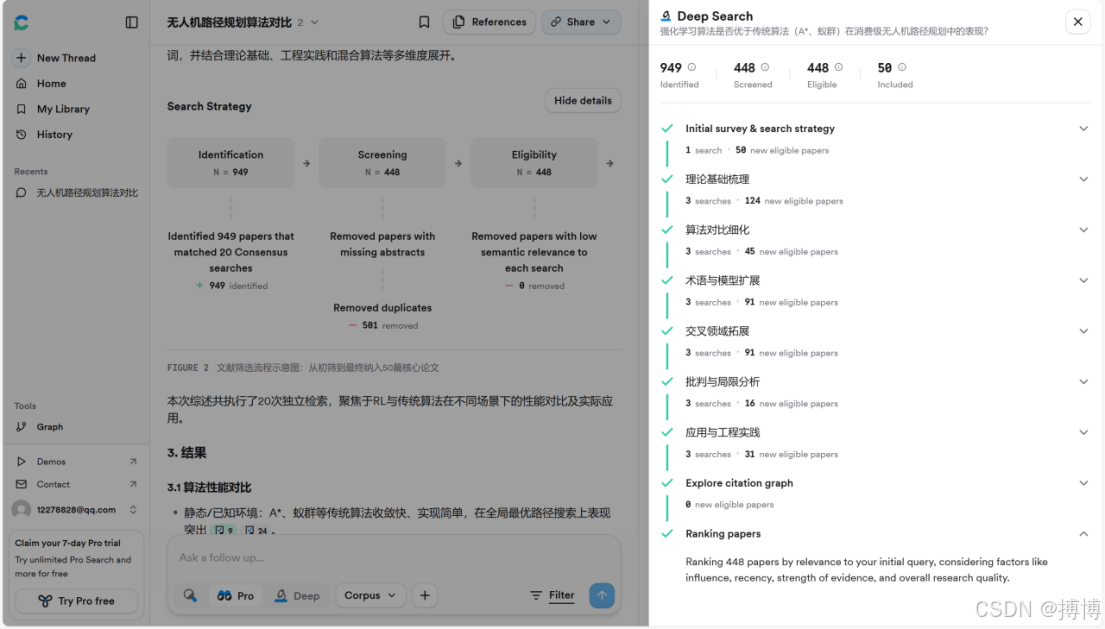
比pro版本增加了很多功能:
点击All details,之后显示如下:
4.4 与其他AI工具联动:构建完整科研工作流(2026最优组合)
2026年成熟的科研工作流是“Consensus探路+Research Rabbit可视化+Sourcely引用校验”,三者联动,覆盖“共识—脉络—引用”全流程:
- Consensus:快速验证选题、梳理共识、挖掘空白(本文核心);
- Research Rabbit:导入Consensus筛选的核心文献,生成文献图谱,梳理领域发展脉络、作者合作网络(前文教程https://blog.csdn.net/lzm12278828/article/details/159771453);
- Sourcely:校验Copilot生成文本的所有引用,确保引用真实、原文匹配,避免幻觉。
五、常见问题与避坑指南
5.1 问题1:检索结果不相关、文献匹配度低
- 原因:问题表述模糊、未限定研究范围、筛选条件过严;
- 解决(2026版精准方法):① 优化问题表述,加入“消费级无人机”“动态路径规划”等限定词;② 先使用Quick模式初步检索,调整问题后再用Pro/Deep;③ 减少筛选条件,先获取全面结果再手动精简。
5.2 问题2:中文文献覆盖少、中文结果精准度低
- 原因:2026版虽优化中文,但中文文献总量少于英文,需调整检索策略;
- 解决:① 中英文问题交叉检索(中文+英文);② 中文问题加入“中文核心”“EI”等关键词;③ 手动补充CNKI高被引中文文献(通过DOI导入Consensus)。
5.3 问题3:Copilot生成文本逻辑生硬、引用不足
- 原因:指令不明确、检索文献量少、未限定写作范围;
- 解决:① 指令明确字数、结构、立场、引用要求;② 优先使用Pro/Deep模式检索,确保文献量充足;③ 生成后手动补充1-2句批判性分析(AI不替代主观判断)。
5.4 问题4:免费额度不足、Pro/Deep次数用完
- 原因:高频使用Deep/Pro模式,未合理分配额度;
- 解决:① 日常选题用Quick,关键场景用Pro/Deep;② 多人协作(导师/同学账号),共享额度。
5.5 问题5:共识结论与主观认知不符、存在偏差
- 原因:依赖部分文献、未全面检索、忽略场景局限性;
- 解决:① 多问题交叉检索,构建全景认知;② 精读高证据强度文献原文,验证AI结论;③ 结合领域常识,批判性看待共识结果(AI是辅助,不替代专业判断)。
六、总结:Consensus——高水平学术论文的AI核心引擎
2026年最新版Consensus,已从单一的学术问答工具,升级为学术研究与论文写作的全链路智能助手。它依托2.5亿+篇权威文献、精准的AI共识分析、强大的Copilot写作功能,彻底解决了传统文献调研“效率低、易片面、难创新”的核心痛点,尤其为硕博研究生、青年学者、跨领域研究者提供了高效科研的捷径。
以消费级无人机路径规划为例,从选题验证、共识梳理、文献综述、空白挖掘到论文写作,Consensus可将传统3个月的文献调研工作压缩至1周内,且确保结论客观、论据充分、创新点精准。其核心价值不仅在于“节省时间”,更在于提升论文的严谨性、全面性与创新性——让研究者不再被文献检索与梳理束缚,专注于核心研究与创新思考。
最后需明确:Consensus是科研辅助工具,而非替代研究者的“写作机器”。高水平论文的核心,始终是研究者的专业判断、批判性思维与原创研究。使用Consensus时,需坚守“AI辅助+人工验证”的原则:依托AI快速梳理共识与脉络,精读核心文献原文验证结论,结合专业知识提炼创新点,最终写出兼具学术深度、创新价值与严谨逻辑的高水平学术论文。
未来,随着AI技术的进一步迭代,Consensus将持续优化文献覆盖、语义理解与写作辅助能力,但“探究学界共识、服务学术创新”的核心定位始终不变。掌握2026最新版Consensus的深度用法,不仅是当下提升科研效率的关键,更是适应AI时代学术研究范式变革的必备技能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 13
13 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)