工业机器人工作站系统模型的创建——Robotstudio实操学习4.3
工业机器人工作站系统模型的创建——Robotstudio实操学习4.3
一、学习目标
本次围绕Robotstudio软件开展工业机器人工作站系统模型创建的实操学习,核心分为建模功能使用、测量工具使用、机械装置创建三大模块,通过实操掌握相关操作技能与理论知识,具体目标如下:
(一)能力目标
1. 能够熟练使用Robotstudio完成基础3D模型的创建与参数设置;
2. 会运用软件测量工具完成不同类型模型的尺寸、角度、距离等参数测量;
3. 可独立创建简易机械装置并完成运动特性的配置与调试;
4. 掌握机器人专用工具的基础创建与设置方法。
(二)知识目标
1. 理解Robotstudio中简单3D建模的核心原理与操作方法;
2. 掌握模型属性设定、几何体导出与保存的相关知识;
3. 熟悉测量工具的各类功能及不同测量场景的应用逻辑;
4. 了解机械装置的创建流程、链接与接点设置,以及运动姿态的配置原理。
二、建模功能的使用
建模功能是Robotstudio创建工业机器人工作站模型的基础,本次实操以创建圆柱体模型为例,掌握3D模型创建与基础设置的全流程,核心操作分为建模功能是Robotstudio创建工业机器人工作站模型的基础,本次实操以创建圆柱体模型为例,掌握3D模型创建与基础设置的全流程,核心操作分为“模型创建”和“模型设置”两大步骤。
(一)3D模型创建
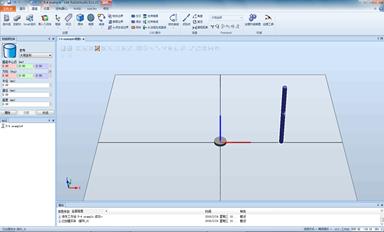
1. 打开Robotstudio软件,单击“新建”菜单命令组,选择“空工作站”,点击“创建”,完成新的空工作站搭建,为建模提供基础操作环境;
2. 切换至“建模”功能选项卡,在“创建”组中单击“固体”菜单,选择“圆柱体”,进入圆柱体模型的参数设置界面;
3. 在参数输入区域填写指定数值,本次实操设置“半径300mm,高度500mm”,确认参数后完成圆柱体模型的创建。
(二)3D模型相关设置
模型创建完成后,可根据需求对其属性进行自定义设置,并完成模型的保存,操作如下:
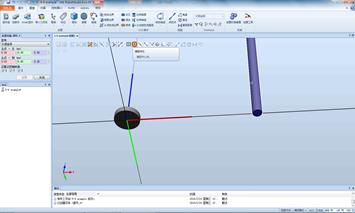
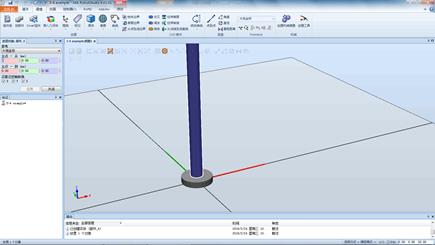
1. 在已创建的圆柱体模型上单击右键,在弹出的快捷菜单中,可进行“颜色、移动、显示”等属性的设定,满足模型的视觉与位置需求;
2. 模型属性设置完成后,再次右键单击模型,选择“导出几何体”,即可将创建的3D模型进行保存,便于后续工作站搭建与使用。
三、测量工具的使用
测量工具是验证模型参数、保障工作站模型精度的关键,Robotstudio的测量工具可实现长方体尺寸、圆柱体直径、锥体角度、物体间最短距离等多种测量需求,核心操作需掌握“测量前准备”、 “各类测量实操”和“测量技巧”三部分内容。
(一)测量前基础准备
打开指定工作站(本次实操为5-3 example),切换到“建模”功能选项卡,先单击“选择部件”选中需要测量的模型部件,再根据测量需求选择对应的**捕捉模式**(如捕捉末端、捕捉边缘、捕捉中心等),为精准测量做准备。
(二)典型场景测量实操
1. 长方体尺寸(长、宽、高)测量
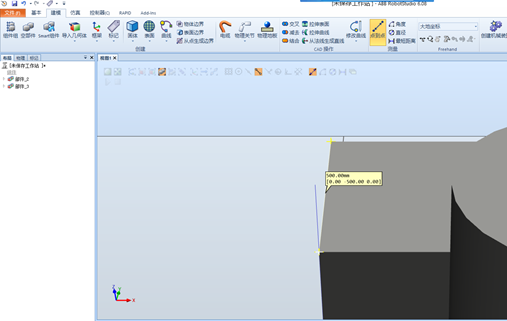
在“建模”选项卡中单击“点到点”,依次选择长方体上需要测量的两个端点(A点、B点),单击鼠标左键后,软件将自动显示两点间的距离,即为对应方向的尺寸参数,其余尺寸采用相同方法测量;
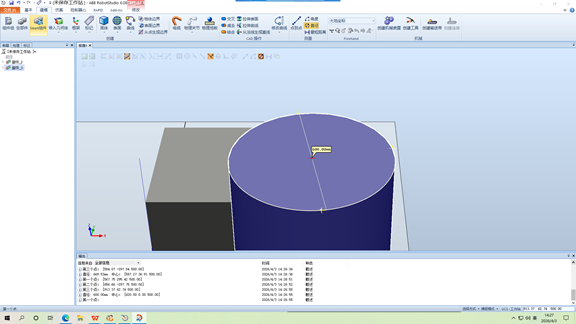
2. 圆柱体直径测量
选中圆柱体部件后,单击“捕捉边缘”,再点击“直径”功能,在圆柱体圆周上任意选取A、B、C三个点,软件将自动计算并显示圆柱体的直径数值;
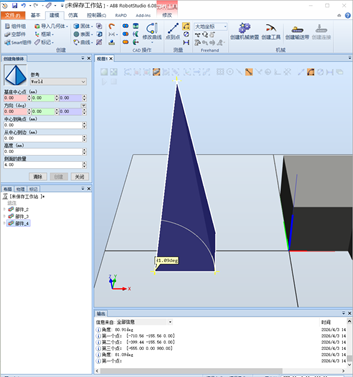
3. 锥体角度测量
选中锥体部件,单击“捕捉末端”,再选择“角度”功能,在锥体需要测量的角度边上依次选取A、B、C三个点,单击鼠标左键,即可得到锥体的角度测量结果;
4. 两个物体间最短距离测量
分别选中两个需要测量的部件,单击“捕捉末端”后选择“最短距离”功能,依次点击两个部件的任意端点,软件将自动计算并显示两物体间的最短距离。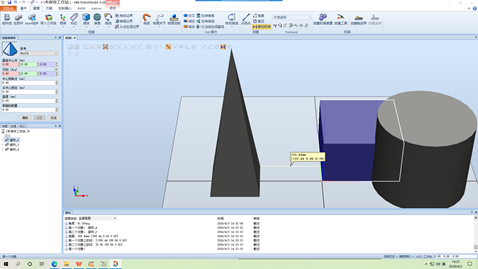
(三)测量核心技巧
测量的精准性与效率主要取决于“选择部件”和“捕捉模式”的灵活运用,需熟练掌握软件中的各类选择工具(选择曲线、选择表面、选择物体、选择部件等)和捕捉模式(捕捉对象、捕捉中心、捕捉中点、捕捉末端、捕捉边缘、捕捉重心等),并结合不同测量场景合理搭配,通过反复实操提升测量熟练度。
四、机械装置的创建
在工业机器人工作站中,为实现输送带、活塞、滑台等周边设备的动画效果,需创建对应的机械装置并配置运动特性。本次实操以“简易活塞模型”为例,详细讲解机械装置创建的全流程,分为“活塞模型创建”和“机械运动特性设置”两大核心环节。
(一)简易活塞模型创建
活塞模型由活塞、活塞杆和套筒三部分组成,核心通过建模、部件放置、结合、求差等操作完成整体模型搭建,具体步骤如下:
1. 新建工作站并保存
打开Robotstudio,新建空工作站并将其保存为5-4 example,为活塞模型创建提供专属操作环境;
2. 活塞与活塞杆创建
在“建模”选项卡中点击“固体”-“圆柱体”,分别创建活塞(直径100mm、高度20mm)和活塞杆(直径40mm、高度500mm);通过“一个点”放置方式,结合“捕捉中心”功能,将活塞杆底面圆心与活塞上表面圆心对齐,完成两者的精准放置;再点击“结合”功能,分别选中活塞杆和活塞,完成部件结合并移走原部件,右键组合体完成颜色自定义设置;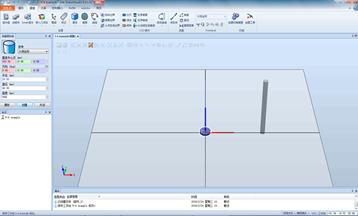
3. 套筒模型创建
继续使用“圆柱体”工具,创建内套筒(直径100mm、高度400mm)和外套筒(直径120mm、高度420mm);通过“框架法”完成套筒组合,在“建模”选项卡中点击“框架”,分别创建框架1(位置0;0;20,定位于外套筒内部)和框架2(位置0;500;0,定位于内套筒底面圆心);右键内套筒选择“两个框架”放置方式,将“从框架”设为框架2、“主框架”设为框架1,完成内、外套筒的精准组合;
4. 套筒求差与优化
点击“减去”功能,第1项选择外套筒、第2项选择内套筒,完成求差操作并移走原部件;右键求差后的套筒完成颜色设置,将相关部件重命名为“活塞”“套筒”,并删除多余部件,简化模型;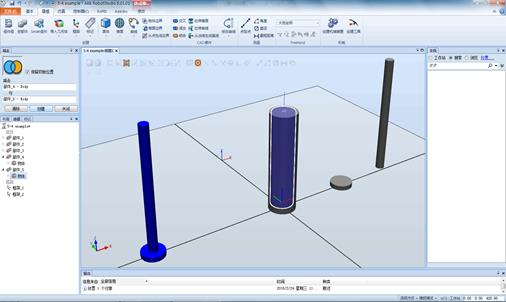
5. 活塞与套筒组合
右键活塞选择“一个点”放置方式,将活塞底面圆心与套筒内部上表面圆心对齐,完成简易活塞整体模型的搭建。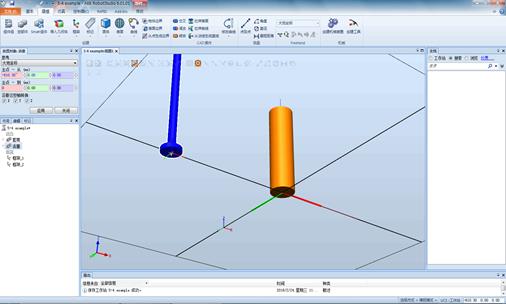
(二)活塞机械运动特性设置
完成活塞模型创建后,需为其配置往复运动的机械特性,实现活塞在套筒内的上下移动效果,核心包括“机械装置创建”、 “链接与接点设置”、 “运动姿态配置”和“调试与保存”四部分,操作如下:
1. 机械装置基础创建
在“建模”选项卡中单击“创建机械装置”,设置机械装置模型名称为“简易活塞”,类型选择“设备”;
2. 链接设置
双击“创建机械装置”界面中的“链接”,创建链接L1和L2,其中L1选择套筒部件并设置为“BaseLink(基础链接)”,L2选择活塞部件,依次点击“应用”完成链接配置;
3. 接点(关节)设置
双击“接点”选项,设置关节名称为J1,关节类型选择“往复的”,配置关节轴、第一个位置(20mm)、第二个位置(300mm)等参数,点击“应用”完成往复运动的核心设置;
4. 运动姿态与转换时间配置
点击“编译机械装置”,在姿态设置区域点击“添加”,创建姿态1(名称:原点位置,关节值20)和姿态2(名称:姿态_300,关节值300),并勾选原点位置;点击“设置转换时间”,将所有姿态间的转换时间均设置为3s,确保活塞运动的匀速性;
5. 运动调试
在“建模”选项卡中,选择Freehand中的“手动关节”,用鼠标拖动活塞,可直接测试活塞在套筒内的上下往复移动效果,验证运动特性配置是否正确;
6. 模型保存与复用
在“基本”功能选项卡中,选中“简易活塞”机械装置并单击右键,选择“保存为库文件”,将其保存至指定路径;后续使用时,点击“导入模型库”-“浏览库文件”,选择已保存的库文件即可快速加载,实现模型复用。
五、学习总结
本次通过Robotstudio软件完成了工业机器人工作站系统模型创建的三大核心实操,从基础的3D建模、模型测量,到复杂的机械装置创建与运动特性配置,逐步掌握了软件的核心操作技能与应用逻辑。
建模功能是工作站创建的基础,需牢记“新建工作站-选择固体类型-设置参数-模型属性调整-导出保存”的全流程;测量工具的使用关键在于根据测量场景灵活搭配选择部件和捕捉模式,确保测量结果的精准性;机械装置的创建则是实操重点,需理解“模型拆分创建-精准放置组合-链接与接点设置-运动姿态配置-调试保存”的逻辑,尤其是活塞往复运动的关节类型、位置参数和转换时间的设置,直接决定机械装置的运动效果。
通过本次学习,不仅掌握了Robotstudio的实操技能,更理解了工业机器人工作站模型创建的“精度优先、逻辑清晰、分步实施”的核心原则。后续需通过更多不同类型的模型(如滑台、夹具)实操,巩固操作技能,提升对工业机器人工作站系统搭建的整体理解,为后续离线编程与仿真打下坚实基础。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)