电动汽车再生制动能量回收:Matlab/Simulink 模型探索
MatlabSimulink再生制动能量回收模型基于逻辑门限控制电动汽车(含文章) matlab/simulink模型,基于逻辑门限值控制算法,模糊控制算法
在电动汽车的发展进程中,能量回收系统无疑是提高能源利用效率的关键一环。今天咱们就来聊聊基于 Matlab/Simulink 的电动汽车再生制动能量回收模型,特别是逻辑门限控制算法以及模糊控制算法在其中的应用。
逻辑门限控制算法
逻辑门限控制是一种相对简单且易于实现的控制策略。其核心思想是设定一些特定的门限值,根据车辆当前的运行状态(比如车速、制动强度等)与这些门限值进行比较,从而决定再生制动系统的工作模式。

咱们来看段简单的 Matlab 代码示例,假设我们以车速作为判断依据:
% 设定门限车速
threshold_speed = 20; % 单位:m/s
current_speed = 30; % 当前车速,这里随意假设一个值,实际应用中需实时获取
if current_speed > threshold_speed
% 满足条件,启动再生制动
regenerative_braking = true;
disp('再生制动启动');
else
regenerative_braking = false;
disp('再生制动未启动');
end在这段代码里,我们设定了一个门限车速 thresholdspeed 为 20m/s。通过获取当前车速 currentspeed 并与门限值比较,如果当前车速大于门限车速,就认为满足再生制动启动条件,将 regenerative_braking 设为 true 并提示启动;否则设为 false 并提示未启动。
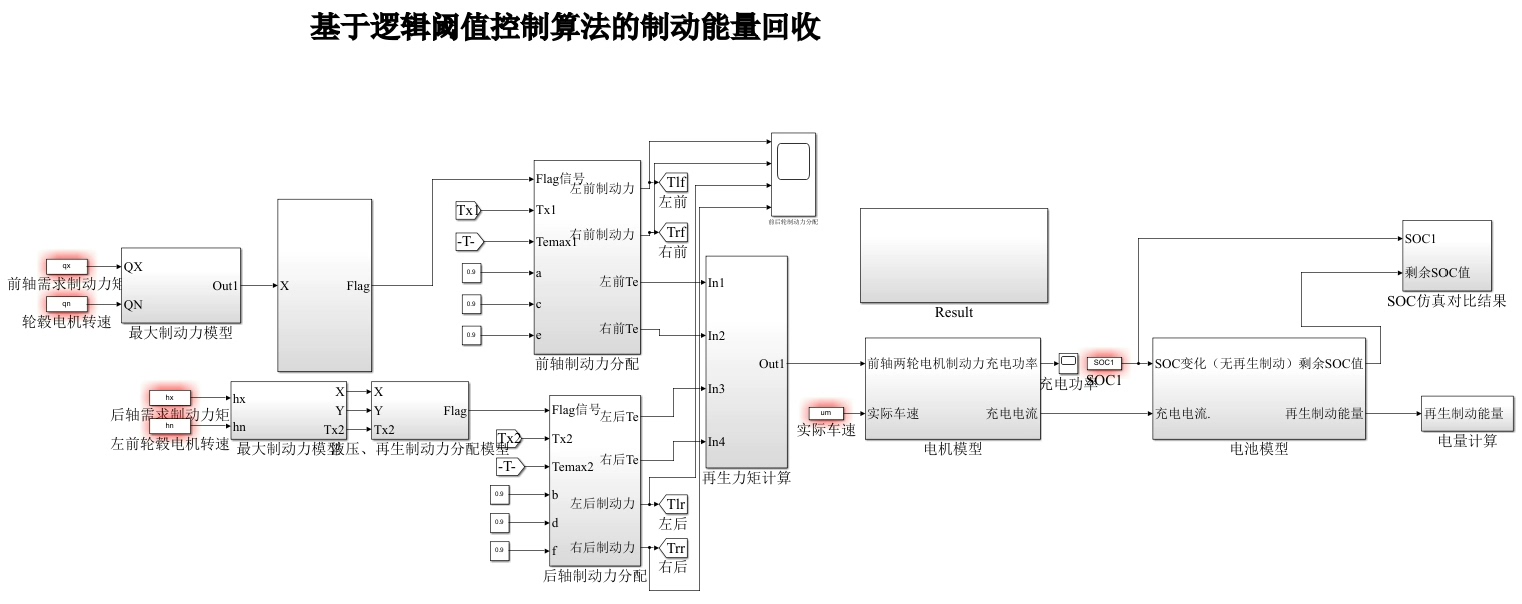
在 Simulink 模型搭建时,就可以基于这样的逻辑,通过条件判断模块(如 Switch 模块)来实现这种逻辑门限控制。比如将车速信号接入 Switch 模块的控制端口,设定门限值,当车速高于门限值时,输出再生制动控制信号到相应的执行模块。
模糊控制算法
模糊控制算法相较于逻辑门限控制更加智能和灵活。它能够处理一些复杂的、难以用精确数学模型描述的系统。模糊控制的基本步骤包括模糊化、模糊推理和去模糊化。
MatlabSimulink再生制动能量回收模型基于逻辑门限控制电动汽车(含文章) matlab/simulink模型,基于逻辑门限值控制算法,模糊控制算法
先看模糊化,比如我们还是以车速和制动踏板开度作为输入变量。以车速为例,模糊化就是将精确的车速值映射到模糊集合中,比如“低速”“中速”“高速”。在 Matlab 里可以这么实现:
% 定义车速模糊变量
speed_fis = mamfis;
speed_fis = addvar(speed_fis,'input','speed',[0 100]);
speed_fis = addmf(speed_fis,'input',1,'low','trimf',[0 0 30]);
speed_fis = addmf(speed_fis,'input',1,'medium','trimf',[20 50 80]);
speed_fis = addmf(speed_fis,'input',1,'high','trimf',[70 100 100]);这里我们创建了一个 Mamdani 型模糊推理系统 speed_fis,添加了输入变量“speed”,范围是 0 到 100m/s,然后分别定义了“low”“medium”“high”三个模糊子集,通过三角形隶属度函数(trimf)来描述每个子集。
模糊推理阶段,就是根据预先设定的模糊规则库,结合模糊化后的输入进行推理。比如规则可以是“如果车速是高速且制动踏板开度较大,那么再生制动强度较大”。
最后是去模糊化,将模糊推理得到的结果转化为精确的控制量,例如再生制动转矩。Matlab 里可以用 defuzz 函数来实现。
% 假设已经经过模糊推理得到模糊输出变量 output_fuzzy
% 去模糊化得到精确输出
crisp_output = defuzz(speed_fis,output_fuzzy,'centroid');在 Simulink 中搭建模糊控制模型时,我们可以利用 Fuzzy Logic Toolbox 提供的模块来实现这些步骤。将输入信号连接到模糊化模块,再连接到模糊推理模块,最后通过去模糊化模块输出精确的控制信号给再生制动系统。
通过逻辑门限控制算法和模糊控制算法在 Matlab/Simulink 中的应用,我们能够更有效地对电动汽车再生制动能量回收系统进行建模与分析,不断优化其性能,让电动汽车在节能的道路上越走越远。希望大家对电动汽车的能量回收技术有了更深入的了解,也欢迎一起探讨交流更多有趣的技术细节。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)