改进的RRT路径规划算法
改进的RRT路径规划算法
该算法的核心由两个紧密相连的部分构成:
- 考虑非完整约束的双向多步RRT路径搜索算法
- 基于三次B样条曲线的路径平滑方法
以下是对该算法部分的详细展示:
一、算法核心思想
本算法的目标是快速地为具有非完整性约束(如转向角限制)的车辆规划出一条平滑、可行、可跟踪的路径。其创新点在于将路径搜索与路径后处理两个步骤有机结合,同时保证了搜索效率和路径质量。
二、改进的RRT路径搜索算法
该部分是对传统RRT算法的三项主要改进。
1. 双向搜索(Bidirectional RRTs)
-
方法:同时构建两棵随机搜索树。
- 一棵树(Ta)从起始点 Xinit 开始生长。
- 另一棵树(Tb)从目标点 Xgoal 开始生长。
-
过程:在每次迭代中,交替地对两棵树进行扩展操作,尝试向对方区域生长。
-
终止条件:当两棵树生成的节点在预定阈值内相遇时,即 distance(Nodea,Nodeb)<δ,则路径连通。
-
优势:极大地提高了搜索速度,避免了单棵树盲目地向广阔空间搜索的问题。
2. 多步扩展(Multi-step Extension)
- 方法:在每次扩展时,不再只模拟一个控制输入 Δt 时间,而是连续模拟多个步长,生成一个更长的候选路径段。
- 优势:使得树结构能更快地探索空间,进一步加速搜索过程。与双向搜索结合,形成了双向多步RRT。
3. 融入非完整性约束(Incorporating Nonholonomic Constraints)
这是保证路径可行性的关键。改进在 Extend 函数中实现。
-
传统RRT判断:仅判断从最近点 Xnear 到新点 Xnew 的路径是否无碰撞。
-
本文改进判断:在无碰撞的基础上,增加了一个转向角约束判断。
- 约束条件:新路径段产生的瞬时转向角 φ 必须小于车辆的最大转向角 φmax(文中设为 π/9,即20度)。
- 算法修改:将
Extend函数中的判断语句修改为:
if collision_free_path(X_near, X_new) and |φ| < φ_max: # 将节点X_new和边(X_near, X_new)加入到树中 else: # 放弃该扩展方向,重新采样或扩展 -
优势:确保搜索树生长出的每一条边都满足车辆的动力学约束,从而保证最终搜索出的原始路径本身就是可由车辆执行的,而不仅仅是一条几何上的连线。
三、路径平滑处理:B样条曲线拟合
尽管改进的RRT搜索出了可行的路径,但其随机性会导致路径曲折、不平滑。本文采用三次B样条曲线进行平滑处理。
1. 动机
- 平滑性:B样条曲线天然具有C²连续性(曲率连续),非常适合车辆平稳跟踪。
- 局部性:修改一个控制点只会影响曲线的一段局部形状,而不会改变整个路径。
- 灵活性:可以通过控制点方便地调整路径形状。
2. 方法
-
控制点:将RRT搜索成功后的路径点序列 {P0,P1,...,Pn} 作为B样条曲线的控制点。
-
曲线生成:使用三次B样条(k=4)基函数 Ni,k(u) 来拟合这些控制点,生成平滑路径 C(u)。
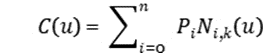
-
确保经过起终点:为了使B样条曲线精确地经过起始点 P0 和目标点 Pn,本文采用了节点向量钳制的方法。即将起始点和目标点在节点向量中设置为多重节点(3重节点),这使得曲线的一端和另一端会分别与第一个和最后一个控制点重合。
四、算法流程总结
该算法的整体工作流程可以清晰地概括为以下四个阶段:
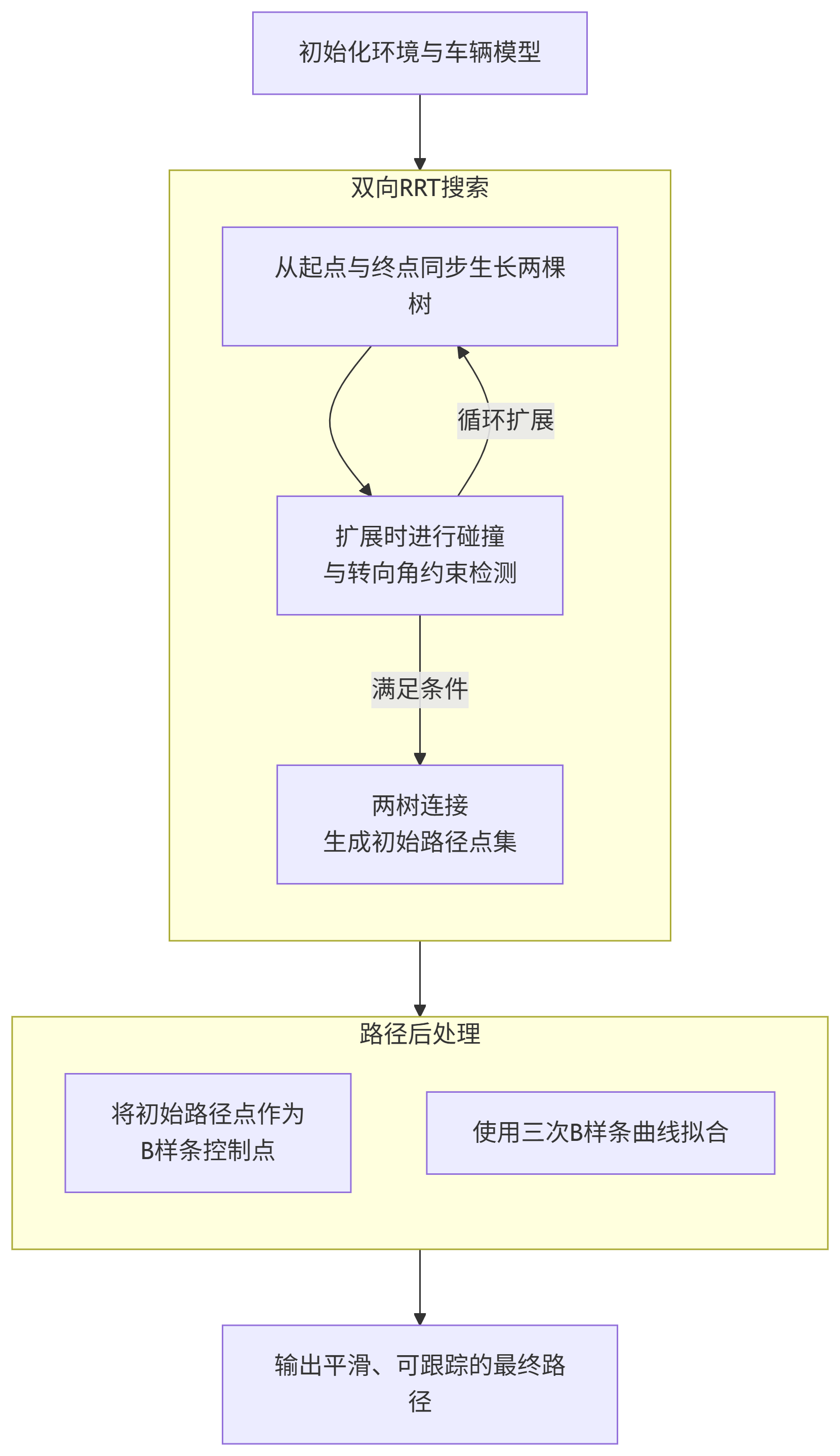
flowchart TD
A[初始化环境与车辆模型] --> B[双向RRT搜索]
subgraph B[双向RRT搜索]
B1[从起点与终点同步生长两棵树]
B2[扩展时进行碰撞<br>与转向角约束检测]
B1 --> B2
B2 -- 循环扩展 --> B1
B2 -- 满足条件 --> B3[两树连接<br>生成初始路径点集]
end
B --> C[路径后处理]
subgraph C[路径后处理]
C1[将初始路径点作为<br>B样条控制点]
C2[使用三次B样条曲线拟合]
end
C --> D[输出平滑、可跟踪的最终路径]五、仿真实验
matlab代码片段:
%% 初始化数据结构
% 初始化树A(从起点开始)
treeA = struct('x', start(1), 'y', start(2), 'theta', start(3), 'parent', 0);
treeA = treeA([]); % 转换为空结构数组
treeA(1) = struct('x', start(1), 'y', start(2), 'theta', start(3), 'parent', 0);
% 初始化树B(从目标点开始)
treeB = struct('x', goal(1), 'y', goal(2), 'theta', goal(3), 'parent', 0);
treeB = treeB([]); % 转换为空结构数组
treeB(1) = struct('x', goal(1), 'y', goal(2), 'theta', goal(3), 'parent', 0);
% 路径和平滑路径
path = [];
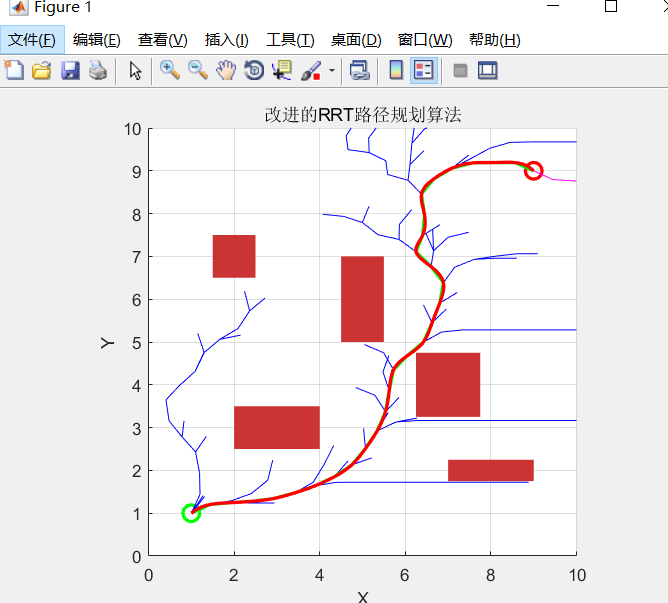
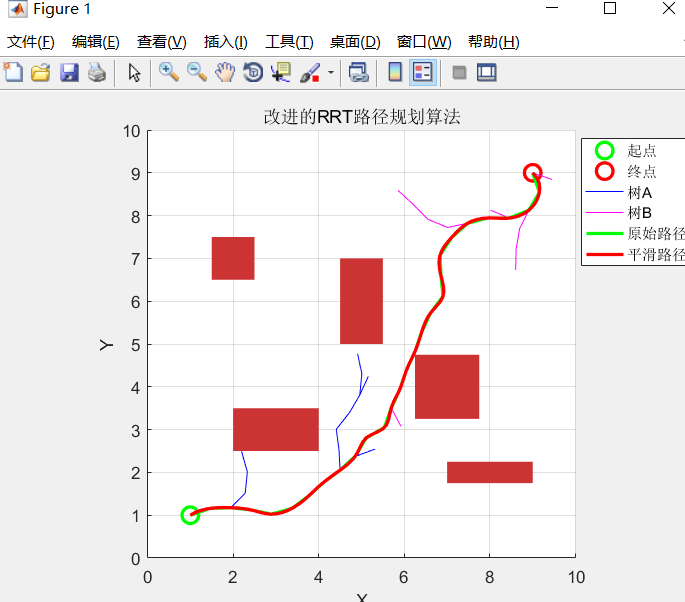
smoothPath = [];运行结果:
总结
该文的算法改进是一个系统性的工程:
- 搜索阶段:通过双向策略和多步扩展来提升速度。
- 约束处理:在扩展过程中直接嵌入非完整性约束来保证可行性。
- 后处理阶段:利用B样条曲线的数学特性来提升路径质量。
最终实现了一个在效率、可行性和平滑度三个方面都表现优异的路径规划算法。
可复制一键运行代码(附详细注释)获取方式,直接复制链接打开:
https://m.tb.cn/h.i9vL8Vr?tk=u5AL5dqsmRY CA381

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 47
47 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)