基于 SRCKF/UKF 的车辆状态估计:从理论到仿真实现
基于平方根容积卡尔曼/无迹卡尔曼 实现纵向、侧向速度、横摆角速度以及质心侧偏角的估计 轮胎模型:dugoff 算法:SRCKF/UKF Carsim/Simulink联仿 有m语言仿真模型,也实现了C程序仿真模型 以下为C程序仿真模型对质心侧偏角估计效果图 分别为:低附 高附 对开 对接(双移线工况)
在车辆动力学研究领域,准确估计纵向、侧向速度、横摆角速度以及质心侧偏角等关键状态参数至关重要。本文将探讨如何基于平方根容积卡尔曼(SRCKF)和无迹卡尔曼(UKF)算法,利用 Dugoff 轮胎模型,通过 Carsim 与 Simulink 联合仿真,并实现 M 语言和 C 程序仿真模型。
轮胎模型 - Dugoff
Dugoff 轮胎模型是车辆动力学仿真中常用的模型,它综合考虑了轮胎的纵向力和侧向力与滑移率、侧偏角之间的关系。以下是简化的 Dugoff 轮胎模型在代码中的体现:
// 假设已经定义了相关的变量,如侧偏角 alpha,纵向滑移率 s,垂直载荷 Fz 等
// 计算轮胎侧偏刚度
double C_alpha = getCAlpha();
// 根据 Dugoff 模型计算侧向力 Fy
double Fy = C_alpha * alpha * (1 - (fabs(C_alpha * alpha) / (mu * Fz))); 在这段代码中,首先获取轮胎侧偏刚度 C_alpha,然后根据 Dugoff 模型计算侧向力 Fy。这里用到了侧偏角 alpha、垂直载荷 Fz 以及摩擦系数 mu,通过一定的公式关系得到侧向力,为后续车辆动力学计算提供基础。
算法 - SRCKF/UKF
平方根容积卡尔曼滤波(SRCKF)
SRCKF 是一种基于容积准则的卡尔曼滤波改进算法,它在处理非线性系统时具有较高的精度和稳定性。以下是 SRCKF 算法核心部分的伪代码:
% 初始化
P = chol(P); % P 是协方差矩阵,chol 函数进行 Cholesky 分解
x_hat = zeros(n, 1); % n 是状态向量维度,初始化状态估计值
% 预测步骤
[X_sigma] = SigmaPoints(x_hat, P); % 计算 Sigma 点
X_sigma = f(X_sigma); % 通过系统模型传递 Sigma 点
x_hat_minus = sum(W_m.* X_sigma, 2); % 计算预测状态
P_minus = zeros(n);
for k = 1:2*n+1
P_minus = P_minus + W_c(k) * (X_sigma(:,k) - x_hat_minus) * (X_sigma(:,k) - x_hat_minus)';
end
P_minus = cholupdate(P_minus, R, 'L'); % 加入过程噪声协方差 R
% 更新步骤
[Y_sigma] = SigmaPoints(x_hat_minus, P_minus);
Y_sigma = h(Y_sigma); % 通过观测模型传递 Sigma 点
y_hat = sum(W_m.* Y_sigma, 2); % 计算预测观测值
S = zeros(m);
for k = 1:2*n+1
S = S + W_c(k) * (Y_sigma(:,k) - y_hat) * (Y_sigma(:,k) - y_hat)';
end
S = cholupdate(S, Q, 'L'); % 加入观测噪声协方差 Q
K = (P_minus * (Y_sigma - repmat(y_hat, 1, 2*n+1)) * W_c) / S; % 计算卡尔曼增益
x_hat = x_hat_minus + K * (y - y_hat); % 更新状态估计值
P = cholupdate(P_minus, -K * S, 'L'); % 更新协方差矩阵在 SRCKF 预测步骤中,首先计算 Sigma 点,通过系统模型传递后得到预测状态和预测协方差矩阵,并考虑过程噪声。更新步骤中,通过观测模型传递 Sigma 点得到预测观测值,计算卡尔曼增益后更新状态估计值和协方差矩阵,以此不断修正估计结果。
无迹卡尔曼滤波(UKF)
UKF 同样是处理非线性系统的有效算法,它通过选择一组 sigma 点来近似状态分布。以下是 UKF 的核心伪代码:
% 初始化
x_hat = zeros(n, 1);
P = eye(n);
% 计算 sigma 点权重
lambda = alpha^2 * (n + kappa) - n;
W_m = [lambda / (n + lambda), 0.5 / (n + lambda) * ones(1, 2*n)];
W_c = W_m;
W_c(1) = W_c(1) + (1 - alpha^2 + beta);
% 预测步骤
X_sigma = SigmaPoints(x_hat, P, lambda);
X_sigma = f(X_sigma);
x_hat_minus = sum(W_m.* X_sigma, 2);
P_minus = zeros(n);
for k = 1:2*n+1
P_minus = P_minus + W_c(k) * (X_sigma(:,k) - x_hat_minus) * (X_sigma(:,k) - x_hat_minus)';
end
P_minus = P_minus + Q;
% 更新步骤
Y_sigma = SigmaPoints(x_hat_minus, P_minus, lambda);
Y_sigma = h(Y_sigma);
y_hat = sum(W_m.* Y_sigma, 2);
S = zeros(m);
for k = 1:2*n+1
S = S + W_c(k) * (Y_sigma(:,k) - y_hat) * (Y_sigma(:,k) - y_hat)';
end
S = S + R;
T = zeros(n, m);
for k = 1:2*n+1
T = T + W_c(k) * (X_sigma(:,k) - x_hat_minus) * (Y_sigma(:,k) - y_hat)';
end
K = T / S;
x_hat = x_hat_minus + K * (y - y_hat);
P = P_minus - K * S * K';UKF 与 SRCKF 类似,在初始化后进行预测和更新步骤。不同之处在于权重计算以及协方差更新方式等细节,UKF 通过特定的权重分配和协方差计算方式来处理非线性问题。
Carsim/Simulink 联仿
通过 Carsim 与 Simulink 联合仿真,可以充分利用 Carsim 精确的车辆动力学模型和 Simulink 强大的控制算法设计与仿真能力。在联仿中,将车辆的物理模型搭建在 Carsim 中,而状态估计的算法,如 SRCKF 或 UKF 则在 Simulink 中实现。通过接口传递数据,实现车辆状态的实时估计和反馈。
仿真模型实现
M 语言仿真模型
在 M 语言(Matlab)中,可以方便地实现上述算法和模型。通过编写函数和脚本,构建完整的车辆状态估计仿真流程。例如,定义系统模型函数 f 和观测模型函数 h,结合 SRCKF 或 UKF 算法代码,实现对纵向、侧向速度、横摆角速度以及质心侧偏角的估计。
C 程序仿真模型
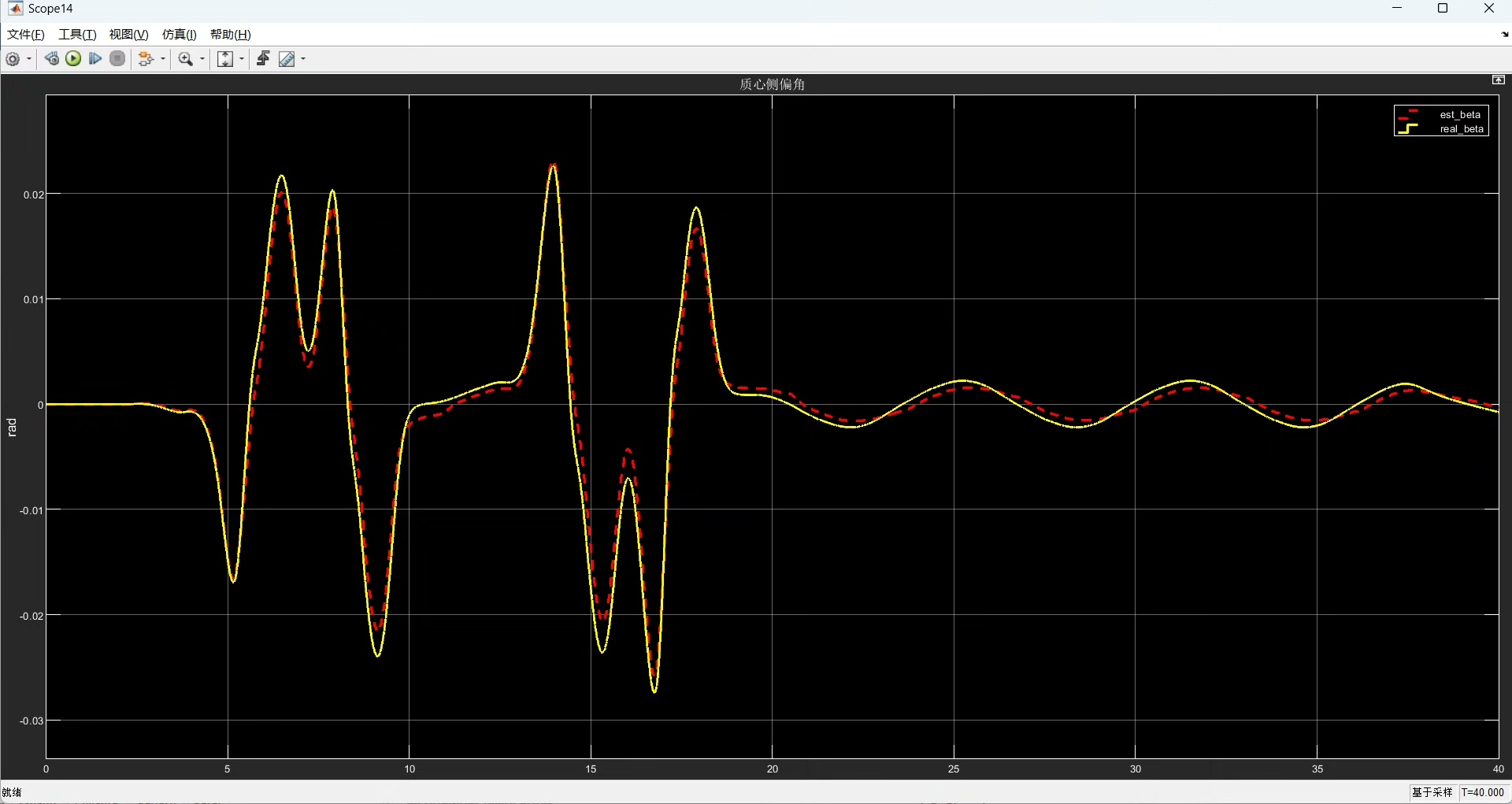
在 C 程序中实现仿真模型,可以提高运行效率,便于在实际车辆控制系统中应用。以下是 C 程序仿真模型对质心侧偏角估计效果图,分别展示了低附、高附、对开、对接(双移线工况)下的情况。
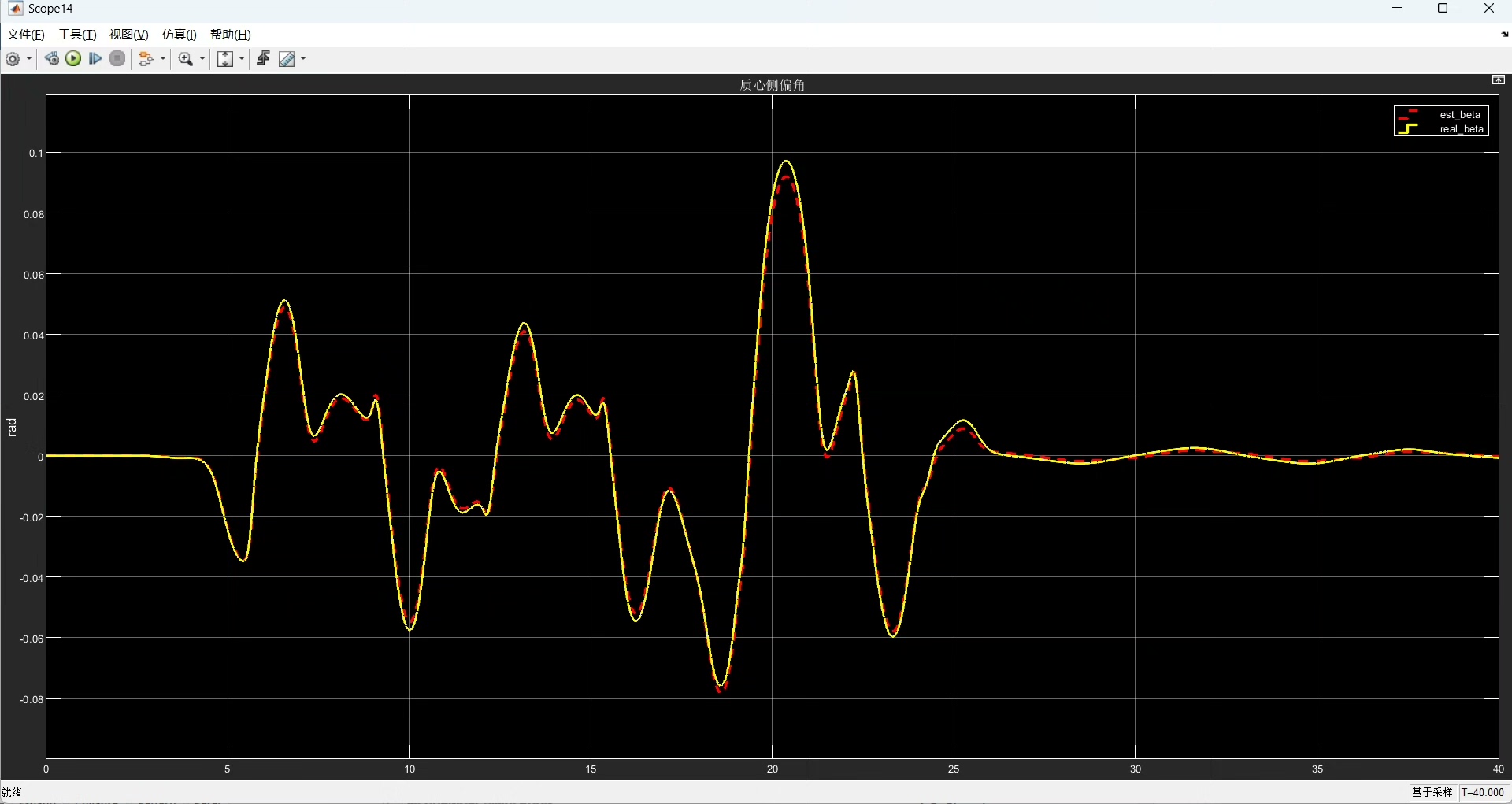
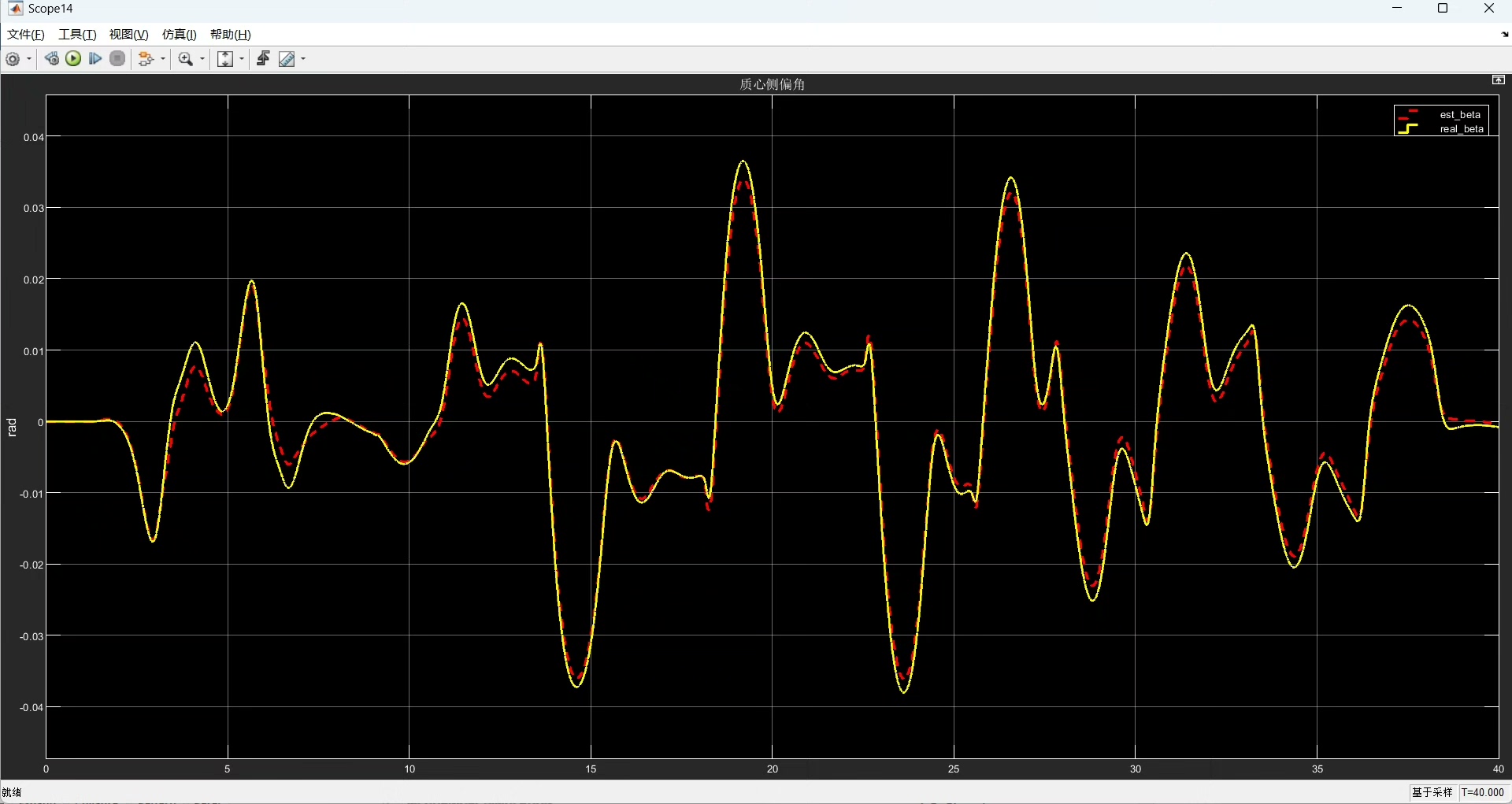
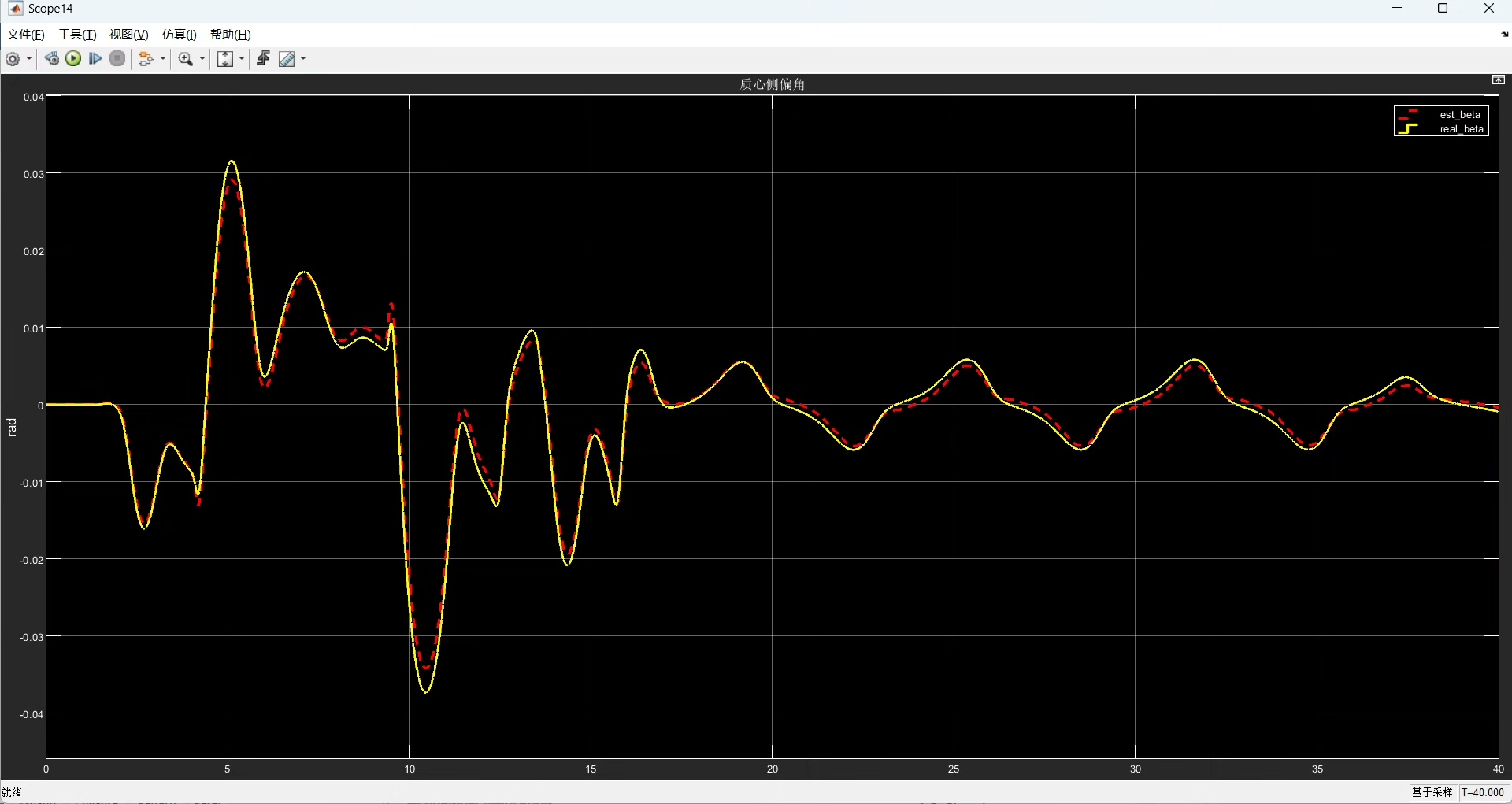
基于平方根容积卡尔曼/无迹卡尔曼 实现纵向、侧向速度、横摆角速度以及质心侧偏角的估计 轮胎模型:dugoff 算法:SRCKF/UKF Carsim/Simulink联仿 有m语言仿真模型,也实现了C程序仿真模型 以下为C程序仿真模型对质心侧偏角估计效果图 分别为:低附 高附 对开 对接(双移线工况)

从这些效果图可以看出,基于 SRCKF/UKF 算法的 C 程序仿真模型在不同路面附着条件和工况下,都能够较好地估计质心侧偏角,为车辆动力学控制提供了可靠的状态参数估计。
通过上述从轮胎模型到算法实现,再到联合仿真和不同语言仿真模型的构建,我们全面地实现了基于平方根容积卡尔曼/无迹卡尔曼的车辆关键状态参数估计,为车辆主动安全控制系统的开发提供了有力的技术支持。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 17
17 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

{kind=link}
{kind=link}
{kind=link}
{kind=link}
所有评论(0)