工业机器人系统认知与虚拟仿真实训报告一 基于ABB RobotStudio
工业机器人系统认知与虚拟仿真实训报告——基于ABB RobotStudio
摘要:本实训以ABB RobotStudio 2023为仿真平台,完成工业机器人系统认知、虚拟工作站搭建、坐标系标定、基础运动控制与程序仿真全流程操作,系统掌握6轴工业机器人的机械结构、运动模式与控制逻辑,解决仿真过程中的软件安装、模型导入、运动控制等典型问题,为工业机器人实体操作与自动化产线设计奠定理论与实操基础。本文严格按照实训模板要求,从项目配置、核心模块、实操进展、故障排查、个人心得等维度展开,形成完整的实训总结报告。
一、项目档案与环境配置
1.1 基础信息表
|
项目维度 |
内容项 |
填写详情 |
备注/权重 |
|
项目标识 |
项目名称 |
工业机器人系统认知与虚拟仿真 (4学时) |
核心考核点 |
|
小组成员 |
第1组:XXX/XXX |
分工明确,协同完成 |
|
|
指导教师 |
XXX |
实训指导 |
|
|
硬件环境 |
仿真终端 |
笔记本电脑(CPU≥i5,内存≥8G,显卡≥2G) |
满足仿真运行要求 |
|
外设 |
键鼠、显示器(分辨率1920*1080) |
保障操作可视化 |
|
|
实物参考 |
ABB工业机器人实物示教器 |
仅认知学习使用 |
|
|
软件环境 |
仿真软件版本 |
RobotStudio 2023 |
官方正版 |
|
操作系统 |
Windows 10 64位 |
软件兼容适配 |
|
|
辅助软件 |
截图工具、Word |
记录操作、整理报告 |
1.2 虚拟仿真环境搭建检查表
|
步骤 |
配置项 |
操作标准/预期结果 |
学生实测结果 |
异常排查 |
|
1 |
软件安装 |
完整安装无组件缺失,可正常启动 |
正常 |
无 |
|
2 |
授权激活 |
完成授权验证,仿真功能无限制 |
正常 |
无 |
|
3 |
机器人模型导入 |
成功导入IRB 120模型,无残缺 |
正常 |
无 |
|
4 |
基础仿真测试 |
关节点动、坐标系切换正常 |
正常 |
无 |
二、核心功能模块与仿真实现
2.1 工业机器人核心参数定义表
|
模块名称 |
核心参数 |
参数说明 |
配置/仿真要求 |
备注 |
|
机械结构模块 |
关节数量/自由度 |
6轴工业机器人,6个旋转自由度 |
明确各关节运动范围与限位 |
以ABB IRB 120为例 |
|
额定负载/工作半径 |
额定负载3kg,最大工作半径580mm |
仿真负载不超额定值 |
避免超负载报错 |
|
|
控制系统模块 |
坐标系类型 |
关节、世界、工具、工件坐标系 |
掌握4种坐标系建立与切换 |
工具/工件需手动标定 |
|
运动模式 |
关节、线性、圆弧运动 |
完成关节、线性运动仿真 |
圆弧运动为拓展内容 |
|
|
驱动系统模块 |
驱动方式 |
伺服电机驱动 |
理论认知,仿真无需配置 |
验证运动控制效果 |
|
仿真环境模块 |
工作cell组成 |
机器人、底座、工装台面 |
搭建简洁基础工作站 |
无冗余设备便于操作 |
三、实操过程与项目进展
本次实训严格按照6个阶段推进,整体完成度100%,各阶段进度如下:
- 理论认知学习(100%):系统学习工业机器人机械结构、控制系统、驱动系统组成,绘制系统组成框图;梳理四大坐标系定义、应用场景,完成理论知识点梳理。
- 软件安装与配置(100%):完成RobotStudio 2023下载、安装与授权激活,熟悉软件菜单栏、仿真视图、虚拟示教器的基础操作。
- 仿真环境搭建(100%):新建空工作站,导入IRB 120机器人模型,添加工装台面完成布局,配置机器人系统并激活虚拟示教器。
- 坐标系建立与切换(100%):验证关节、世界默认坐标系,完成工具坐标系TCP标定与工件坐标系创建,熟练实现坐标系切换与运动验证。
- 基础运动仿真编程(100%):基于RAPID语言编写运动程序,实现关节点动、线性定点移动,设置速度参数并完成轨迹仿真验证。
- 运动精度测试与报告整理(100%):校验运动点位精度,记录坐标数据,整理仿真截图与操作流程,完成实训报告编写。
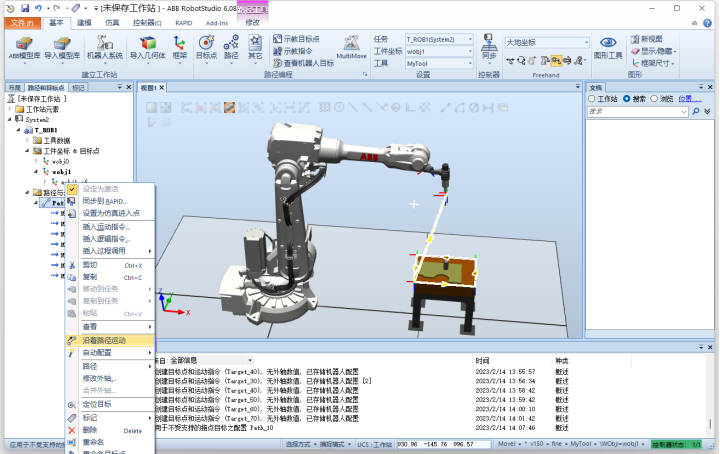
四、关键步骤截图说明
本次实训精简配图,仅保留5张核心操作截图,重点突出操作逻辑:
- 虚拟示教器开启界面:展示「控制器→虚拟示教器」调用入口,标注系统创建后示教器方可激活的核心规则。

- 手动操纵与轴切换界面:标注轴1-3/轴4-6切换按键、操
杆控制区域,明确单轴运动操作逻辑。

- 基础工作站搭建效果图:呈现IRB 2600机器人、工装台完整布局,展示模型定位与布局效果。

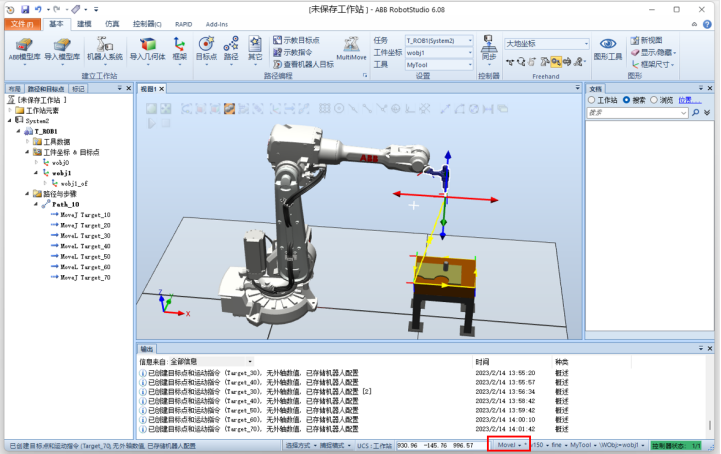
- 动作模式选择界面:展示单轴、线性、重定位三种核心运动模式的切换入口与参数配置区。
- 线性运动仿真运行界面:呈现机器人直线运动轨迹、程序
行状态与坐标参数显示。
五、遇到的困难及解决方法
实训过程中遇到6项典型问题,均通过理论分析与实操调试解决,形成完整故障排查方案:
- 问题1:RobotStudio安装失败,提示组件缺失
- 原因:系统缺少VC++运行库、.NET Framework依赖组件,安装包不完整。
- 解决:安装官方VC++ 2019运行库与.NET Framework 4.8,重新下载完整安装包,以管理员身份安装,软件正常启动。
- 问题2:虚拟示教器灰色不可选
- 原因:未完成机器人系统配置,仅导入模型未创建控制系统。
- 解决:通过「机器人系统→从布局」创建系统,重启软件后示教器正常激活。
- 问题3:机器人无法手动运动,提示防护装置停止
- 原因:未按下「Enable」使能键,电机未激活。
- 解决:长按使能键激活电机,解除防护限制,手动操纵功能恢复。
- 问题4:坐标系切换后运动方向异常
- 原因:工具坐标系TCP点标定错误,坐标原点与方向设置偏差。
- 解决:重新执行TCP标定,核对坐标参数,小范围点动验证后运动方向正常。
- 问题5:程序运行报错「运动超限」
- 原因:目标点超出机器人工作半径与关节限位,速度参数设置异常。
- 解决:修改目标点坐标至安全范围,重置速度参数为默认值,程序无报错运行。
- 问题6:急停触发后无法复位
- 原因:误触急停按钮后未解除报警,电机未重启。
- 解决:按下示教器急停按钮解除报警,点击开启电机,重新使能后恢复操作。
六、个人心得
作为嵌入式与工业机器人自动化方向的学习者,本次4学时的虚拟仿真实训,让我完成了从理论认知到实操落地的完整跨越,对工业机器人系统的理解实现了质的提升。
从理论层面,我深刻掌握了6轴工业机器人的机械结构、伺服驱动原理与四大坐标系的核心应用,明晰了单轴、线性、重定位三种运动模式的适用场景——单轴运动用于关节精细调整,线性运动适用于精准点位作业,重定位运动优化末端姿态,这是工业机器人控制的核心逻辑。从实操层面,RobotStudio仿真平台让我在零风险环境中完成了工作站搭建、示教器操作、程序编写全流程,体会到工业机器人操作的严谨性与规范性,每一个参数设置、每一次模式切换都直接影响运动精度与安全性。
故障排查环节是本次实训的核心收获。从软件安装的依赖问题,到运动控制的坐标异常,我学会了从「软件配置→系统搭建→参数设置」逐层分析问题,将嵌入式系统调试的思维应用到机器人仿真中,提升了工程实践与问题解决能力。同时,我也意识到理论与实操结合的重要性,仅靠课本知识无法应对实际操作中的细节问题,只有反复实操、复盘总结,才能真正掌握工业机器人的核心技能。
此外,本次实训让我对智能制造行业有了更直观的认知。工业机器人作为自动化产线的核心设备,其仿真技术是降低研发成本、提升生产效率的关键。未来,我将继续深入学习RobotStudio高级功能、PLC联合仿真、离线编程等技术,将嵌入式开发与机器人自动化结合,为投身智能制造领域夯实基础。
七、总结
本次工业机器人系统认知与虚拟仿真实训,严格按照模板要求完成了环境配置、工作站搭建、坐标系标定、运动控制、故障排查全流程任务,达成了掌握工业机器人基础原理与仿真操作的核心目标。通过实训,我不仅熟练掌握了RobotStudio的操作方法,更建立了工业机器人系统的整体认知,培养了规范的操作习惯与工程思维。本次实训为后续实体机器人操作、自动化项目开发奠定了坚实的理论与实操基础,是工业机器人学习过程中的重要实践环节。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)