【无人机动态路径规划】基于灰狼算法结合动态窗口的无人机复杂山地模型威胁路径规划和动态避碰附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
📖
🔥 内容介绍
一、无人机路径规划面临的挑战
-
复杂山地环境:在复杂山地区域,地形起伏大,存在高山、峡谷、悬崖等多种地形地貌。这些地形不仅增加了无人机飞行的难度,还可能限制无人机的飞行路径选择。同时,山地环境中的气象条件也较为复杂,如气流不稳定、强风等,会对无人机的飞行姿态和稳定性产生影响。
-
威胁因素:除了地形因素,复杂山地模型中还可能存在各种威胁,如敌方雷达探测区域、防空火力范围等。无人机需要规划出一条既能避开这些威胁,又能高效到达目标地点的路径。
-
动态变化:在实际飞行过程中,环境并非一成不变。例如,新的威胁可能突然出现,或者无人机自身的状态(如电量、负载等)发生变化,这就要求无人机能够实时调整路径,以应对这些动态变化,实现动态避碰。
二、灰狼算法原理
-
仿生学基础:灰狼算法(Grey Wolf Optimizer, GWO)是一种受灰狼群体捕食行为启发的元启发式优化算法。在灰狼群体中,存在着严格的等级制度,包括 α、β、δ 和 ω 四个等级。α 狼是领导者,负责决策和指挥群体行动;β 狼辅助 α 狼进行决策;δ 狼服从 α 和 β 狼的指挥,同时监督 ω 狼;ω 狼处于群体底层,负责执行一些基本任务。
-
搜索与优化过程:在灰狼算法中,将问题的解看作是灰狼个体,通过模拟灰狼群体的协作捕食行为来寻找最优解。灰狼群体在搜索猎物(最优解)的过程中,主要通过三种行为实现:包围猎物、追捕猎物和攻击猎物。
-
包围猎物:灰狼个体根据与猎物(当前最优解)的距离调整自己的位置,向猎物靠近。数学上,通过计算每个灰狼个体与当前最优解之间的距离,并根据一定的公式更新个体位置。
-
追捕猎物:α、β 和 δ 狼引领整个群体向猎物移动,其他狼(ω 狼)跟随它们行动。在算法中,通过对 α、β 和 δ 狼位置的加权平均来更新其他狼的位置,使得整个群体朝着最优解的方向搜索。
-
攻击猎物:当接近猎物时,灰狼群体发起攻击,即更新自己的位置以更接近最优解。算法通过调整一些参数,使灰狼个体在最优解附近进行更精细的搜索,以找到全局最优解。
-
三、动态窗口原理
-
基本概念:动态窗口法(Dynamic Window Approach, DWA)是一种用于局部路径规划的方法,特别适用于实时动态环境。它基于机器人(这里指无人机)当前的速度和加速度限制,定义一个动态窗口,该窗口包含了在未来一段时间内无人机所有可能的速度组合。
-
路径规划过程:对于动态窗口内的每个速度组合,模拟无人机在该速度下的运动轨迹。通过评估函数对这些轨迹进行评价,评估函数通常考虑与障碍物的距离、目标方向以及路径的平滑度等因素。选择评估函数值最优的速度组合作为下一时刻的控制输入,从而实现实时的局部路径规划。例如,如果某个速度组合下的轨迹能够使无人机避开附近的障碍物,同时朝着目标方向前进,并且路径较为平滑,那么这个速度组合就具有较高的评估函数值,更有可能被选择。
四、两者结合的原理
-
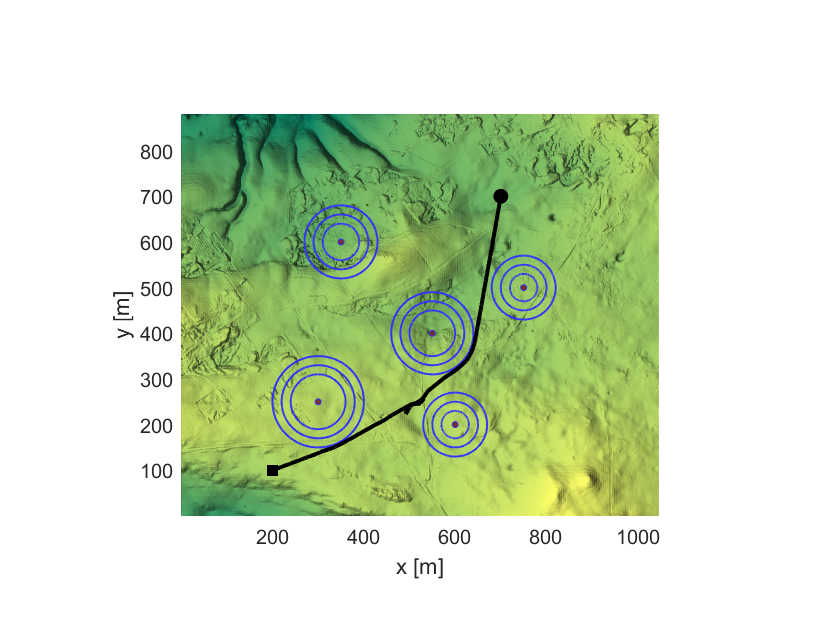
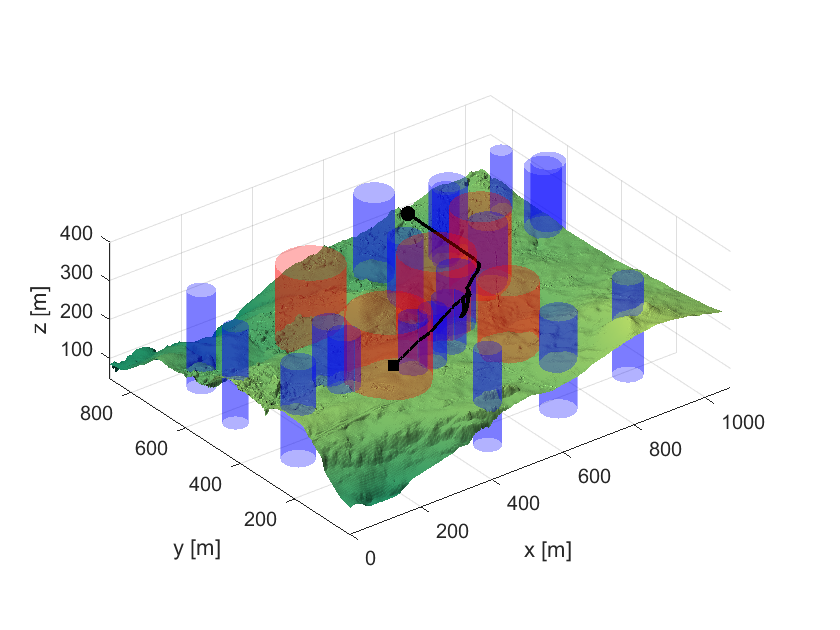
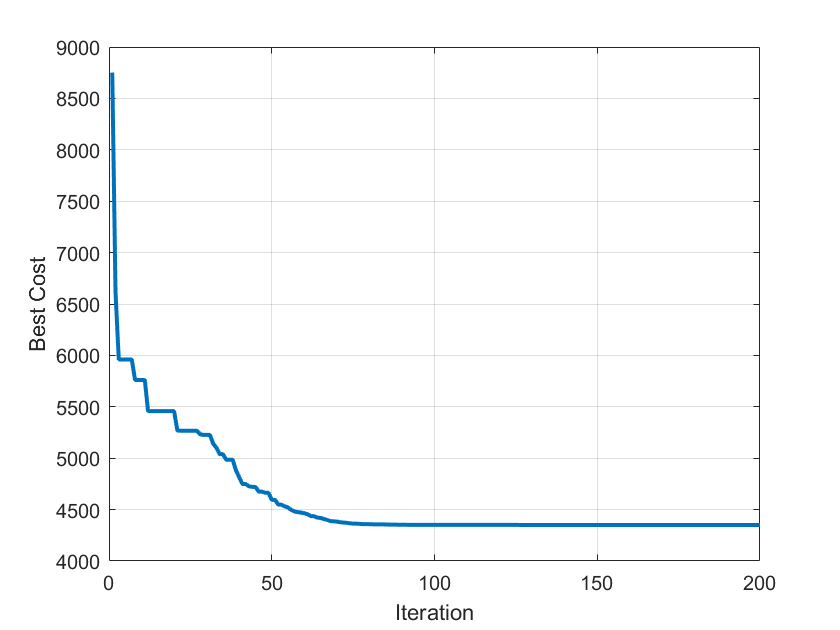
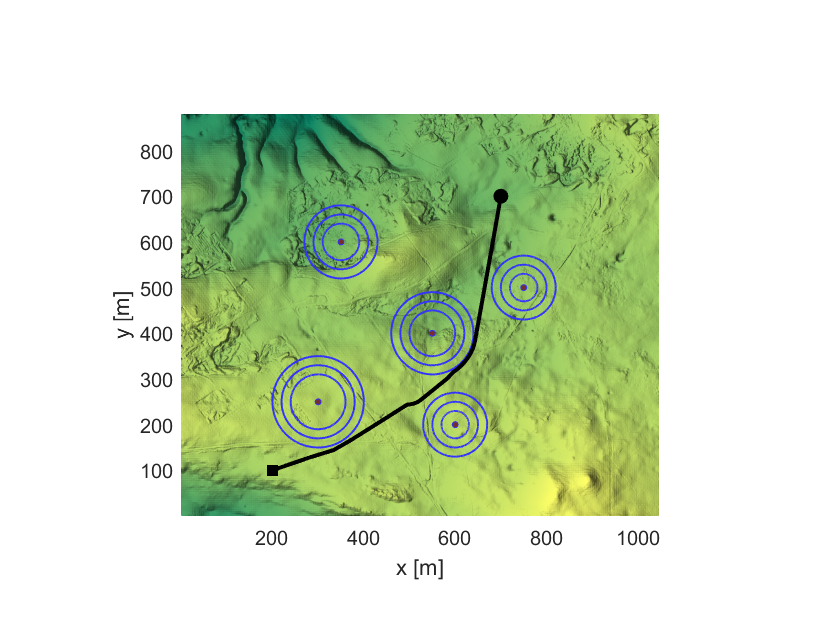
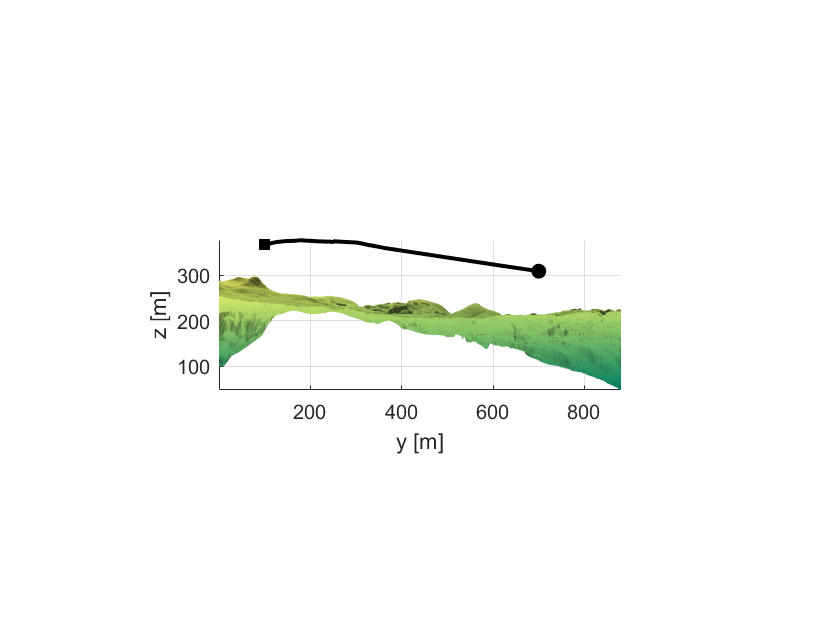
全局路径规划:首先利用灰狼算法进行全局路径规划。灰狼算法能够在复杂的山地模型威胁环境中,从全局角度搜索出一条大致可行的路径,避开主要的威胁区域,为无人机提供一个初始的飞行方向。在这个过程中,灰狼算法通过不断迭代优化,寻找使目标函数(如路径长度最短、避开威胁区域等)最优的路径解。
-
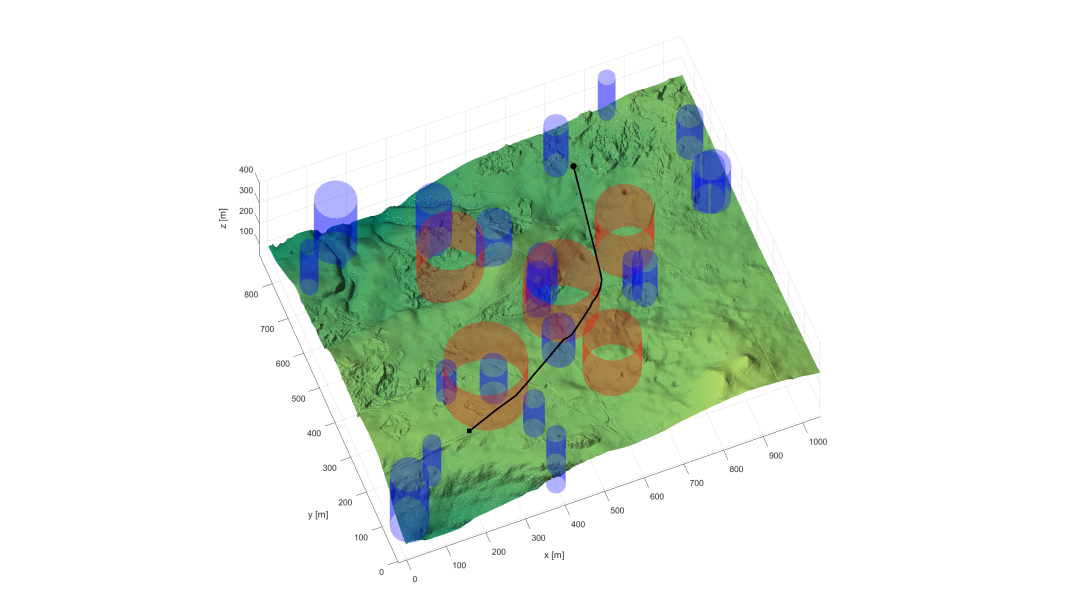
局部动态避碰:在无人机飞行过程中,结合动态窗口法进行局部路径规划。当遇到新的威胁或需要实时调整路径时,动态窗口法根据无人机当前的状态(如位置、速度、加速度等)和周围环境信息(如障碍物位置、目标位置等),在动态窗口内生成多个可能的速度和路径组合。通过评估函数对这些组合进行评价,选择最优的路径进行实时调整,实现动态避碰。
-
协同工作机制:灰狼算法生成的全局路径为动态窗口法提供了一个整体的方向指引,而动态窗口法根据实时环境对全局路径进行局部细化和调整,确保无人机在复杂山地环境中既能避开威胁,又能实时应对动态变化,实现安全、高效的飞行。这种结合方式充分发挥了灰狼算法的全局搜索能力和动态窗口法的局部实时调整能力,提高了无人机在复杂山地模型中的路径规划和动态避碰能力。
📖
⛳️ 运行结果
📖
📣 部分代码
%
% Create random paths (solutions)
%
function sol=CreateRandomSolution_PSO(VarSize,VarMin,VarMax)
% Random path nodes
sol.x=unifrnd(VarMin.vx,VarMax.vx,VarSize);%在min~max范围的连续均匀分布中生成一个随机数
sol.y=unifrnd(VarMin.vy,VarMax.vy,VarSize);
sol.z=unifrnd(VarMin.vz,VarMax.vz,VarSize);
end
📖
🔗 参考文献
[1] 杜卫康.基于GWO-PSO融合算法的USV群体对抗动态避障与协同围捕[D].吉林大学[2026-04-02].
[2] 康亚伟.移动机器人避障路径规划算法研究[D].湖北工业大学,2021.
📖
🌿 往期回顾可以关注主页,点击搜索

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献68条内容
已为社区贡献68条内容

所有评论(0)