边缘AI目标检测与跟踪——模块化技术架构对比分析
一、引言:为什么边缘AI模块需要“粗簪化”设计
在国防安全、边境巡逻、无人机反制、海事监控等场景中,AI目标检测与跟踪已成为光电设备的核心能力。然而,不同场景对算力、功耗、体积、接口的需求差异巨大——一台固定安装的安防相机和一架无人机吊舱,对AI处理单元的要求完全不同。
因此,设计一套“粗簪化”的AI模块产品线,覆盖从入门型到旗舰型的不同算力等级,同时保持统一的接口标准和通信协议,是一种常见且合理的工程策略。本文以Tofu系列AI识别跟踪模块为例,从算力、接口、算法、功耗等维度进行技术对比,探讨边缘AI模块的选型思路。
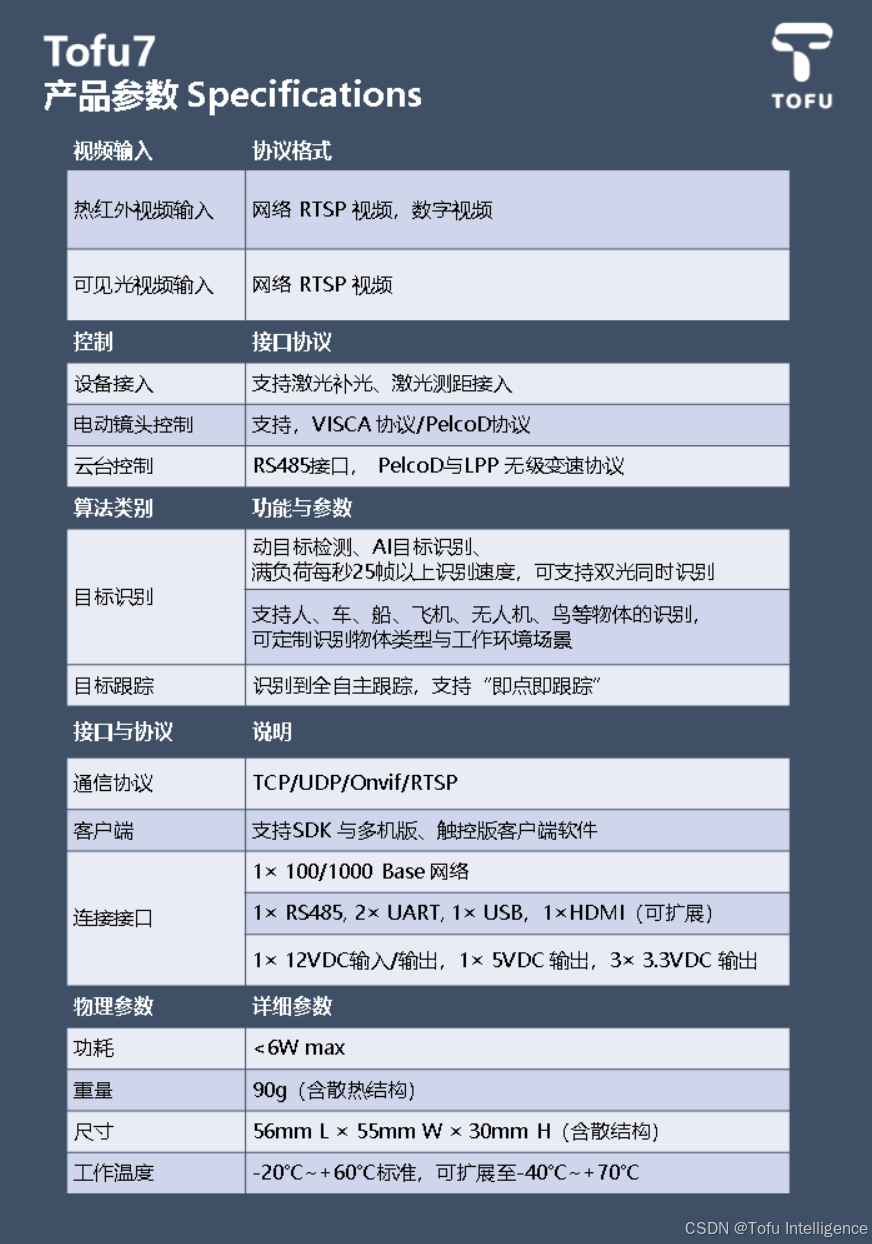
二、四款模块的定位与差异化设计
下表展示了四款不同算力等级的AI识别跟踪模块的定位与关键指标:
|
定位 |
入门型 |
紧凑型 |
高性能型 |
旗舰型 |
|
算力 |
3 TOPS |
2 TOPS |
10 TOPS |
6 TOPS |
|
功耗 |
2.5W |
2W |
5W |
5W |
|
体积 |
60×70×24mm |
40×40×25mm |
60×55×20mm |
41×56×28mm |
|
识别速度 |
标准 20fps |
标准 15fps |
最大 67fps |
最大 25fps |
|
跟踪速度 |
最大 50fps |
10fps |
最大 50fps |
最大 50fps |
|
双光同时处理 |
✗ |
✗ |
✓ |
✓ |
|
数字变倍 |
✗ |
✗ |
✓ 1X~2X |
✓ 1X~2X |
|
第三方算法部署 |
✗ |
✗ |
✓ |
✗ |
|
典型场景 |
固定安防、通用监控 |
内置云台相机一体化 |
多光谱、复杂场景 |
双光融合、无人机反制 |
从上表可以看出,四款模块的差异化设计逻辑非常清晰:紧凑型追求极致小体积和低功耗,高性能型追求算力和功能丰富度,旗舰型则在双光融合和跟踪性能上做了重点优化。
三、算力与实际性能的关系:不能只看TOPS
许多工程师在选型时习惯看TOPS数字,但实际上边缘AI模块的处理速度受多种因素影响。以上表中的数据为例:
- 10 TOPS的高性能型,识别速度可达67fps,远超其他型号
- 6 TOPS的旗舰型,识别速度为25fps,但支持双光同时处理(40fps)
- 3 TOPS的入门型,识别速度也达到20fps,性价比良好
这说明算力并非决定实际性能的唯一因素。架构优化、内存带宽、算法效率、模型轻量化程度等都会产生显著影响。特别是在双光同时处理场景下,旗舰型的架构优势更加明显。
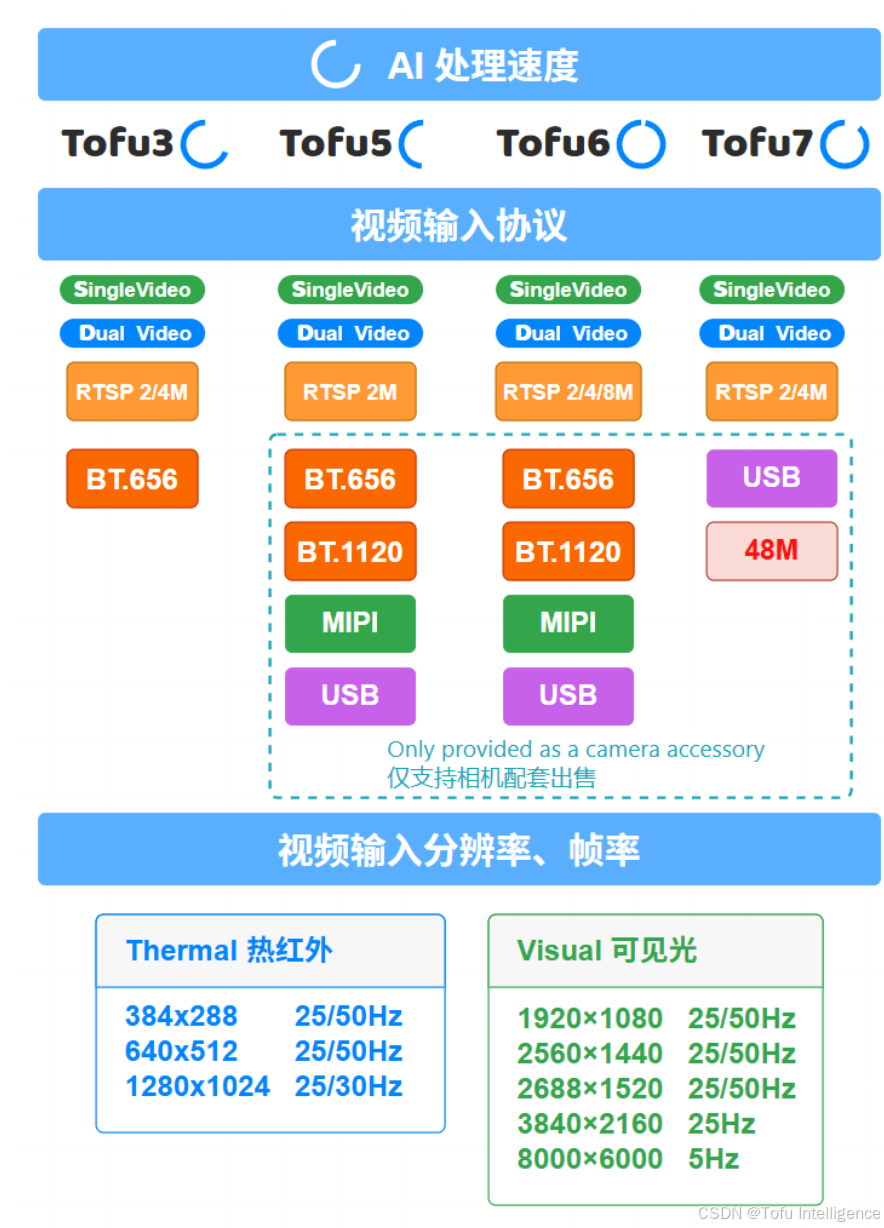
四、视频接口兼容性:工程实践中的关键考量

视频输入接口的丰富度直接决定了模块能否接入现有设备。以下是四款模块的视频接口支持情况:
|
接口类型 |
支持情况 |
|
H.264 RTSP |
全系列支持,最通用的网络视频输入方式 |
|
BT.656 |
入门型、紧凑型、高性能型支持,标准SDI接口 |
|
BT.1120 |
紧凑型、高性能型支持,高清SDI接口 |
|
MIPI |
紧凑型、高性能型支持,嵌入式相机直连 |
|
USB |
高性能型、旗舰型支持,方便调试和临时接入 |
|
CameraLink |
入门型、紧凑型、高性能型支持,工业级高速接口 |
工程实践中,视频接口的选择需要综合考虑:相机型号、传输距离、帧率要求、现有线缆基础设施等。例如,已有模拟相机的场景优先选择BT.656/BT.1120接口,网络相机则用RTSP,嵌入式场景则需要MIPI。
五、算法能力与跟踪模式
5.1 目标识别类型
全系列标配人、车、船、无人机的识别能力。入门型、高性能型、旗舰型还额外支持飞机、直升机、鸟类的识别。目标类型采用简洁的数值编码:0xA1(人/飞机)、0xA2(车/直升机)、0xA3(船/鸟)、0xA4(无人机)。
5.2 四种跟踪模式的技术原理
|
跟踪模式 |
适用场景 |
技术原理 |
|
自动跟踪 |
无人值守、自动巡逻 |
AI综合评分(目标大小、距离、类型)自动选择最优目标,无需人工干预 |
|
点选跟踪 |
多目标场景切换 |
用户点击指定目标,系统自动锁定最近目标并启动跟踪 |
|
波门跟踪 |
固定视场监控 |
在固定尺寸正方形区域内检测目标,支持16x16到128x128多种尺寸 |
|
框选跟踪 |
手动指定特定目标 |
用户拖拽任意大小矩形,基于图像特征匹配进行跟踪 |
5.3 旗舰型的独特优势:双光融合与Boost模式
旗舰型模块在两个方面具有独特优势:
- 双光同时处理:同时处理可见光和热红外两路视频,识别速度40fps。在夜间或低能见度环境下,两路信息互补融合,大幅提升检测可靠性
- Boost模式:跟踪速度可从标准50fps飙升至200fps,通过简化特征提取和轻量级跟踪头实现,适合跟踪高速无人机等快速目标
六、选型决策框架
基于以上技术对比,可以归纳出以下选型决策框架:
|
场景类型 |
推荐模块 |
选型理由 |
|
固定安防监控 |
入门型 (3 TOPS) |
性价比优,人车船无人机识别已足够,2.5W低功耗适合长时间运行 |
|
内置云台相机 |
紧凑型 (2 TOPS) |
极致小体积,可与相机镜头匹配后一体化出售 |
|
多光谱/复杂场景 |
高性能型 (10 TOPS) |
算力充裕,支持双光、数字变倍、第三方算法部署 |
|
双光融合/无人机反制 |
旗舰型 (6 TOPS) |
双光同时处理、Boost 200fps跟踪,专为高动态场景优化 |
七、总结
边缘AI模块的选型不应仅仅关注TOPS算力,而应综合考虑以下因素:
- 实际场景的目标类型和复杂度
- 视频接口与现有设备的兼容性
- 功耗与散热约束(尤其是封闭环境)
- 是否需要双光融合、数字变倍等高级功能
- 是否需要部署自定义算法模型
- 体积约束与安装方式
模块化、粗簪化的产品设计思路,让用户可以根据实际需求灵活选择,避免“大马拉小车”或“小马拉大车”的情况。对于开发者而言,选择提供完善通信协议文档和源码支持的模块,能够显著降低二次开发的集成成本。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)