基于霸王龙优化算法的LSTM网络模型(TROA-LSTM)的一维时间序列预测matlab仿真
目录
1.程序功能描述
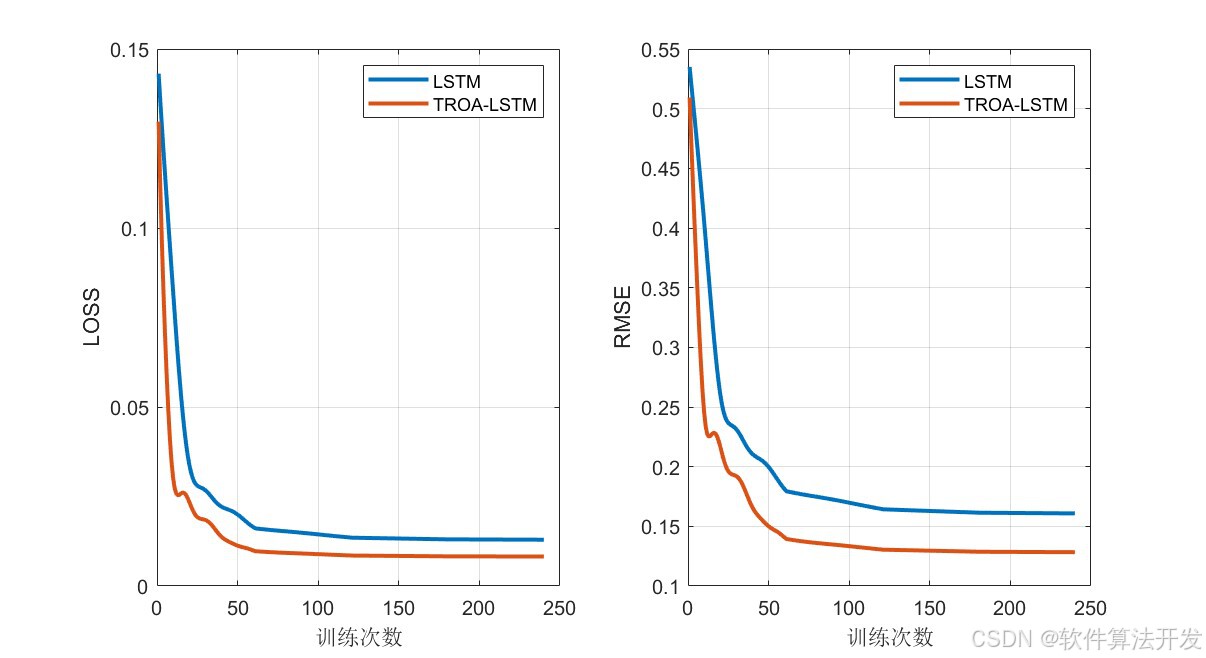
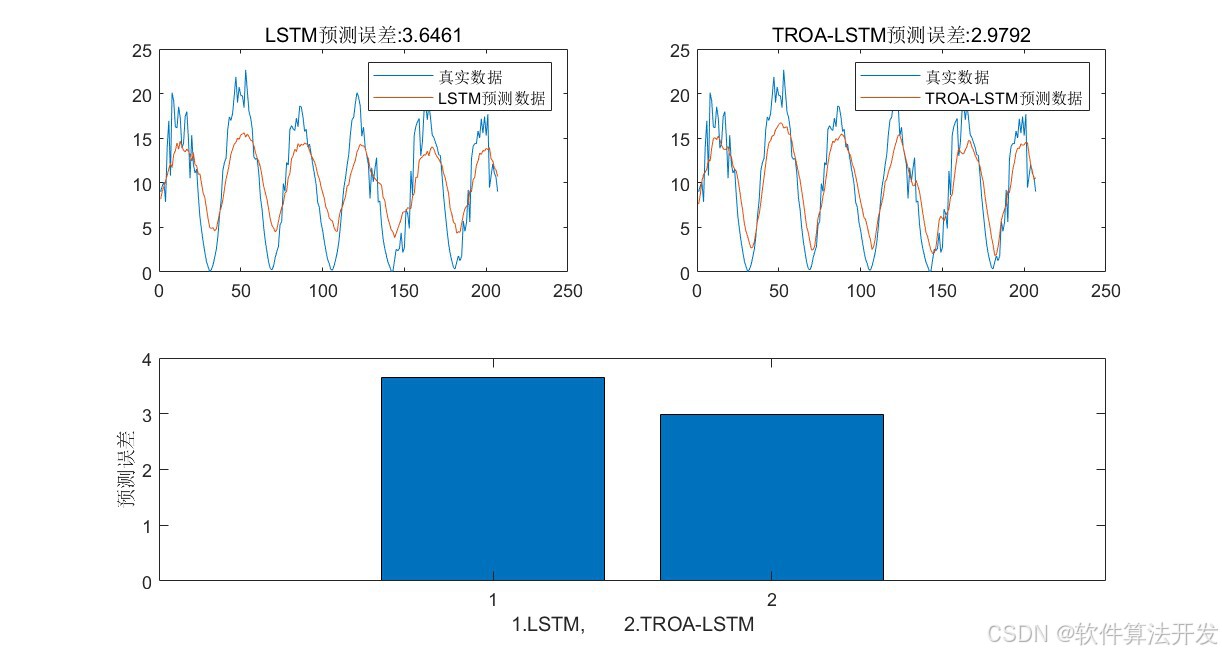
TROA-LSTM是将霸王龙优化算法与长短期记忆网络 结合的时间序列预测模型。其逻辑是:利用TROA的全局寻优能力,自适应优化LSTM的关键超参数(本代码中为LSTM隐藏层神经元数量),解决LSTM超参数凭经验设置导致的预测精度不足问题;再用优化后的LSTM网络学习时间序列的时序依赖特征,实现一维时间序列的精准预测。
2.测试软件版本以及运行结果展示
MATLAB2024B版本运行
3.部分程序
% 将优化得到的最佳参数转换为整数,作为LSTM隐藏层神经元数量
% 加1是为了确保至少有1个神经元
NN=floor(znew(I))+1;% 定义LSTM神经网络结构
layers = [ ...
sequenceInputLayer(indim) % 序列输入层,输入维度为indim
lstmLayer(NN) % LSTM层,神经元数量为优化得到的NN
reluLayer % ReLU激活函数层,增加非线性能力
fullyConnectedLayer(outdim) % 全连接层,输出维度为outdim
regressionLayer]; % 回归层,用于回归任务(输出连续值)% 设置网络训练参数
options = trainingOptions('adam', ... % 使用Adam优化器,适合深度学习训练
'MaxEpochs', 240, ... % 最大训练轮数为240
'GradientThreshold', 1, ... % 梯度阈值为1,防止梯度爆炸
'InitialLearnRate', 0.004, ... % 初始学习率为0.004
'LearnRateSchedule', 'piecewise', ...% 学习率调度方式为分段衰减
'LearnRateDropPeriod', 60, ... % 每60轮衰减一次学习率
'LearnRateDropFactor',0.2, ... % 学习率衰减因子为0.2(变为原来的20%)
'L2Regularization', 0.01, ... % L2正则化系数为0.01,防止过拟合
'ExecutionEnvironment', 'cpu',... % 使用GPU加速训练(需配置GPU支持)
'Verbose', 0, ... % 不显示训练过程细节
'Plots', 'training-progress'); % 显示训练进度图表(损失变化等)% 训练LSTM网络
[net,INFO] = trainNetwork(Pxtrain, Txtrain, layers, options);% 使用训练好的网络进行预测
Dat_yc1 = predict(net, Pxtrain); % 对训练数据进行预测(归一化尺度)
Dat_yc2 = predict(net, Pxtest); % 对测试数据进行预测(归一化尺度)
% 将预测结果反归一化,恢复到原始数据范围
Datn_yc1 = mapminmax('reverse', Dat_yc1, Norm_O);
Datn_yc2 = mapminmax('reverse', Dat_yc2, Norm_O);% 将细胞数组转换为矩阵(方便后续处理和分析)
Datn_yc1 = cell2mat(Datn_yc1);
Datn_yc2 = cell2mat(Datn_yc2);% 保存训练信息、预测结果和收敛曲线到MAT文件,便于后续分析
save R2.mat INFO Datn_yc1 Datn_yc2 T_train T_test Convergence_curve141
4.算法理论概述
TROA-LSTM是将霸王龙优化算法(Tyrannosaurus Rex Optimization Algorithm, TROA)与长短期记忆网络(LSTM)结合的混合预测模型,专门用于一维时间序列(如气温、股价、负荷、流量等连续单变量时序数据)预测。其核心思想是:利用TROA算法的全局寻优能力,自动优化LSTM网络的关键超参数(本程序中为LSTM隐藏层神经元数量),解决人工调参效率低、精度差的问题,最终提升一维时间序列的预测准确性和泛化能力。
一维时间序列预测的核心目标是:基于历史连续观测值x1,x2,...,xt,构建映射模型预测未来时刻xt+1的值,属于时序回归任务,LSTM擅长捕捉时序数据的长期依赖关系,而TROA可高效优化 LSTM的核心参数,二者结合形成高性能预测模型。
4.1 霸王龙优化
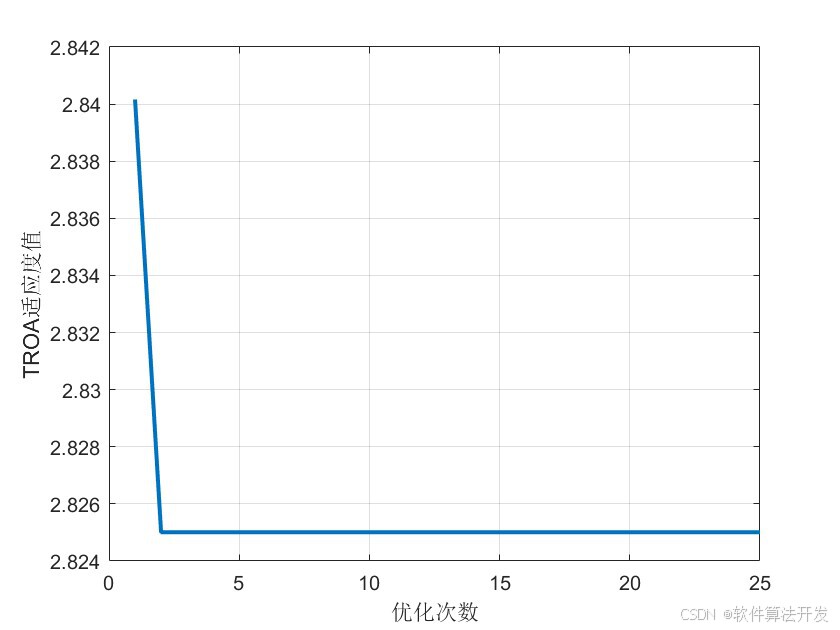
TROA是模拟霸王龙捕食行为的智能优化算法,核心模拟霸王龙追击猎物的行为,通过种群迭代搜索全局最优解,具有收敛快、寻优精度高的特点。算法核心设定:种群分为霸王龙(领导者)和猎物,通过追击成功率、奔跑速率等参数更新位置,逐步逼近最优参数。
其核心行为参数:
追击成功率sr:霸王龙捕获猎物的概率;
霸王龙奔跑率tr:霸王龙追击的速度系数;
猎物奔跑率pr:猎物逃跑的速度系数;
迭代概率比ES:随迭代次数动态调整的追击概率,平衡全局搜索和局部开发。
通过迭代更新种群位置,筛选最优LSTM神经元数量,循环至最大迭代次数:
4.1.1 迭代概率比计算
随迭代次数动态调整,平衡全局搜索和局部开发:

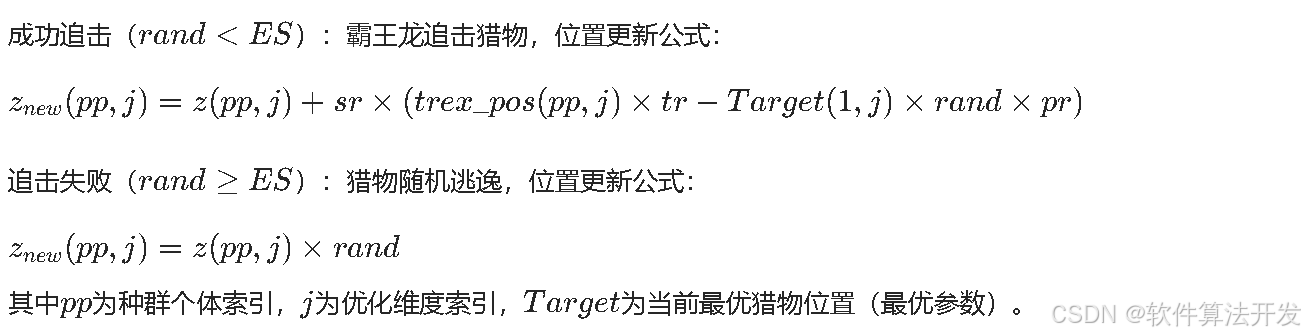
4.1.2 种群位置更新
模拟霸王龙追击猎物行为,分成功追击和失败两种情况:
4.1.3 边界约束
防止参数超出搜索范围:

4.1.4 适应度更新与最优个体筛选
计算新位置适应度,若更优则替换原位置,更新全局最优参数:

4.2 最优LSTM
迭代结束后,筛选适应度最小的最优个体,转换为LSTM隐藏层神经元数量NN:

根据最优神经元数NN构建LSTM网络,适配一维时序预测:
5.完整程序
VVV
关注后手机上输入程序码:145

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)