Simulink 仿真 PMSM 电机模型简谈
一、Simulink 官方的 PMSM 电机模型
1.1 Surace Mount PMSM 电机模型
下图为 Simulink 自带的 Surace Mount PMSM 电机模型:
1.2 模型配置
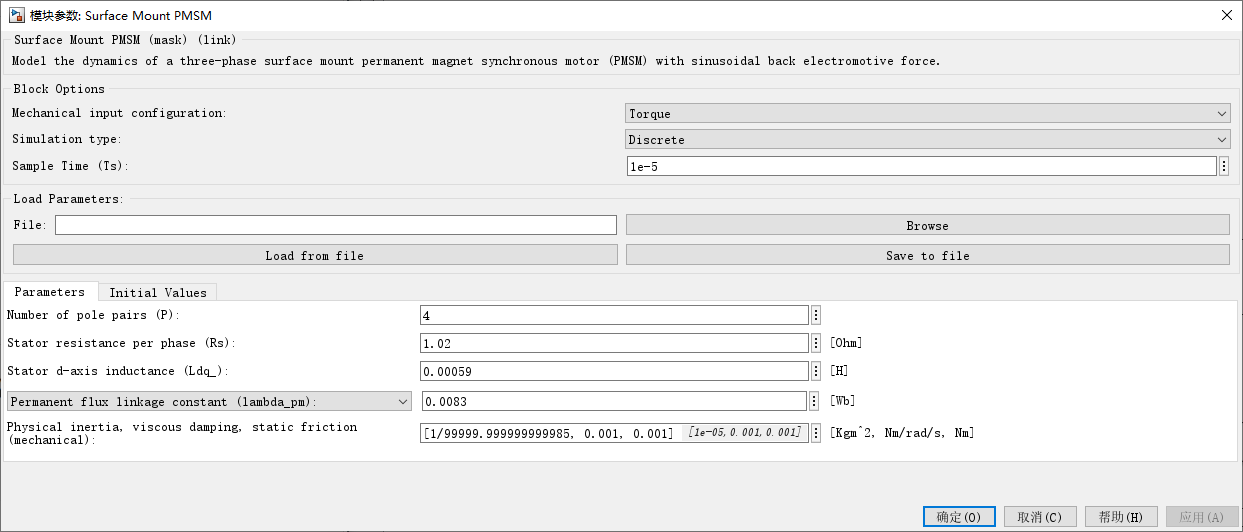
1.2.1 运行配置
| 配置项 | 配置内容 | 解释 |
| Mechanical input configuration | Torque | 给负载扭矩模型会算出转速 |
| Simulation type | Discrete | 离散仿真 (数字控制必须) |
| Sample Time | 1e-5 | 和模型定步长采用设置时间相同 |
1.2.2 电机核心参数
| 配置项 | 配置内容 | 解释 |
| Number of pole pairs | 4 | 极对数 |
| Stator resistance | 1.02 | 定子电阻 (Ω) |
| Stator d-axis inductance | 0.00059 | d 轴电感 (H) |
| Permanent flux linkage | 0.0083 | 永磁磁链 (Wb) |
1.2.3 机械参数
| 配置项 | 配置内容 | 解释 |
| Physical inertia | 1/99999.999999999985 (1e-5 kg·m²) | 转动惯量:物体抗加速能力,惯量越大电机越难加速 / 减速 |
| viscous damping | 0.001 | 粘性阻尼:类似速度越快,阻力越大 |
| staticfriction (mechanical) | 0.001 (Nm) | 静摩擦力 (静摩擦转矩):小扭矩推不动,必须超过门槛才动 |
二、PMSM 电机模型结构概览
2.1 PMSM 电机模型参数
下图是我们预设的电机模型参数:
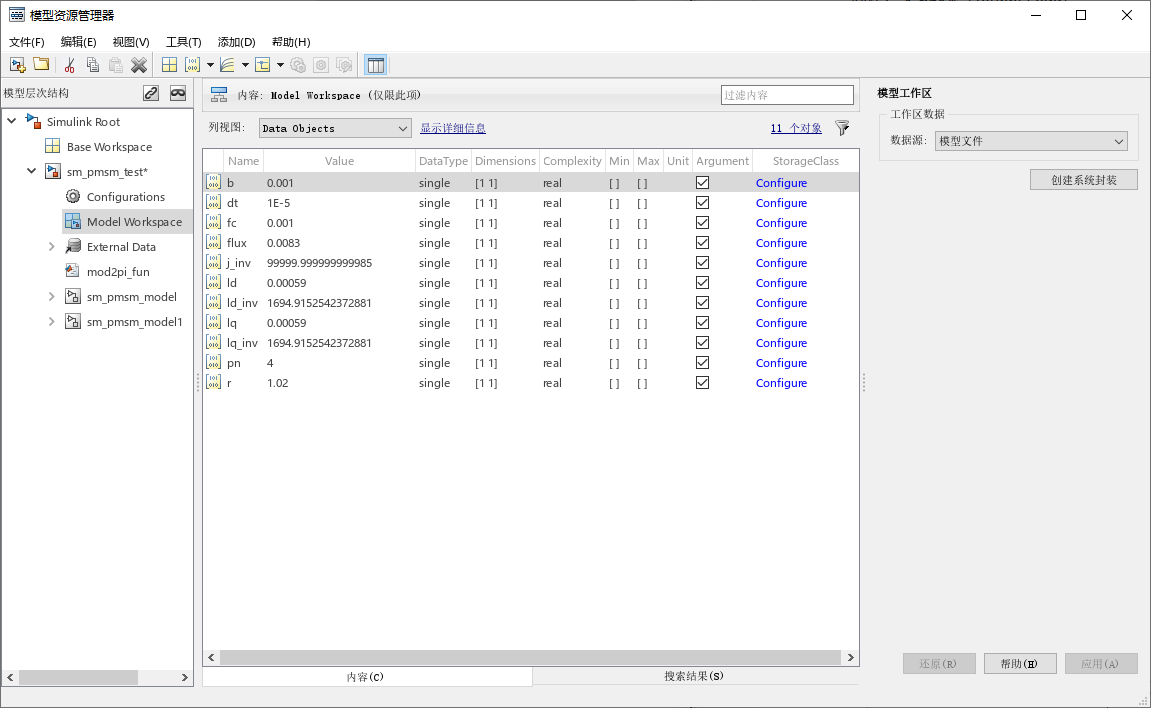
| 说明 | 配置 |
| B (粘性阻尼系数) | 0.001 (N·m·s) |
| dt (仿真步长 / 采样时间) | 1E-5 |
| fc (摩擦库仑项) | 0.001 (N·m) |
| flux (永磁体磁链) | 0.0083 (ψf) |
| j_inv (惯量的倒数) | 99999.999999999985 (J) |
| ld (d 轴电感) | 0.00059 (H) |
| id_inv (d 轴电感倒数) | 1694.9152542372881 (H) |
| lq (q 轴电感) | 0.00059 (H) |
| lq_inv (q 轴电感倒数) | 1694.9152542372881 (H) |
| pn (极对数) | 4 |
| r (定子电阻) | 1.02 (Ω) |
注:倒数是为了给乘法加速
2.2 PMSM 电机模型结构
下图是我们 PMSM 电机建模的结构:
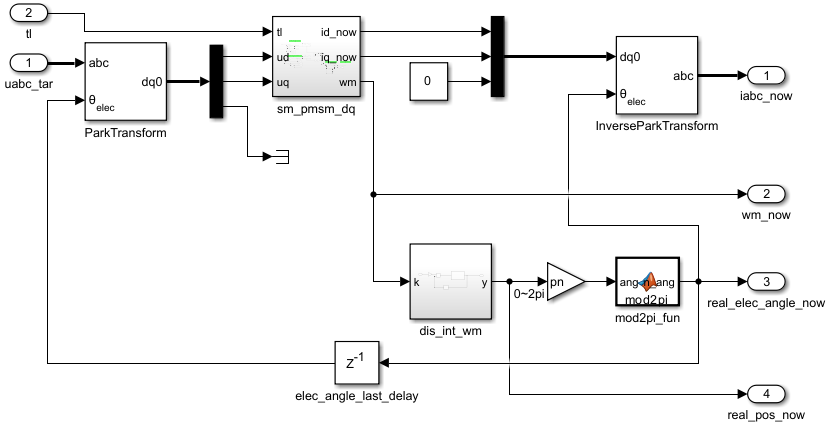
2.2.1 模型输入
uabc_tar:
- 简述:三相电压指令 (V)
- 来源:PWM 等效电压或控制器输出
tl:
- 简述:负载转矩 (TN·m)
- 作用:外界阻力,机械负载、摩擦、风阻
2.2.2 模型输出
iabc_now:
- 简述:当前电机三相电流输出
- 用于:控制反馈、示波观察
wm_now:
- 简述:机械转速
- 单位:rad/s
real_elec_angle_now:
- 简述:电角度
- 范围:0 ~ 2π
real_pos_now:
- 简述:机械角度
- 范围:0 ~ 2π
2.2.3 核心模块
ParkTransform:
- 概述:把三相电压转换到 qd 轴坐标系
- 输入:uabc_tar (三项电压)
- 输出:ud、uq
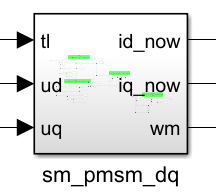
sm_pmsm_dq:
- 概述:核心电机模型,内部做了三件事:电流计算、电磁转矩计算、机械运动方程
- 输入:ud、uq、tl (负载转矩)
- 输出:id_now、iq_now、wm (机械转速)
dis_int_wm:
- 概述:角速度积分器,对机械转速积分后得到机械角度
- 输入:wn (机械转速)
- 输出:real_pos_now (机械角度)
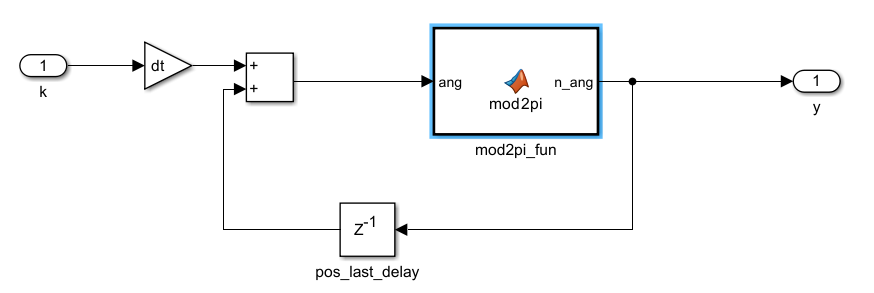
mod2pi_fun:
- 概述:把角度限制在 0~2 π
InverseParkTransform:
- 概述:dq 轴转化为 abc
- 输入:id、iq、θe
- 输出:ia、ib、ic
2.3 sm_pmsm_dq 模型解析
2.3.1 全局概览
sm_pmsm_dq 中内部做了三件事:电流计算、电磁转矩计算、机械运动方程。
- 输入:ud、uq、tl (负载转矩)
- 输出:id_now、iq_now、wm (机械转速)
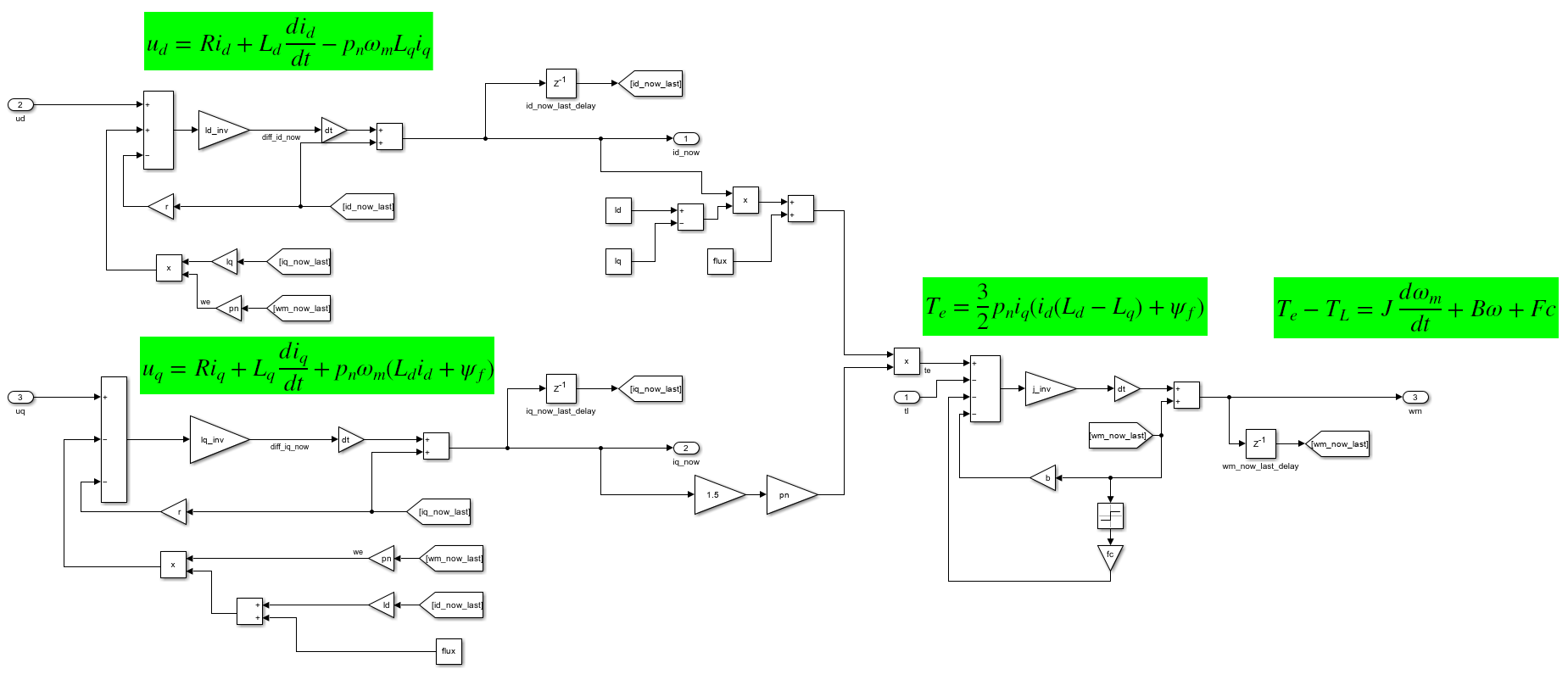
其实现过程由下列四个公式实现:
d 轴电压方程:
d 轴电压方程:
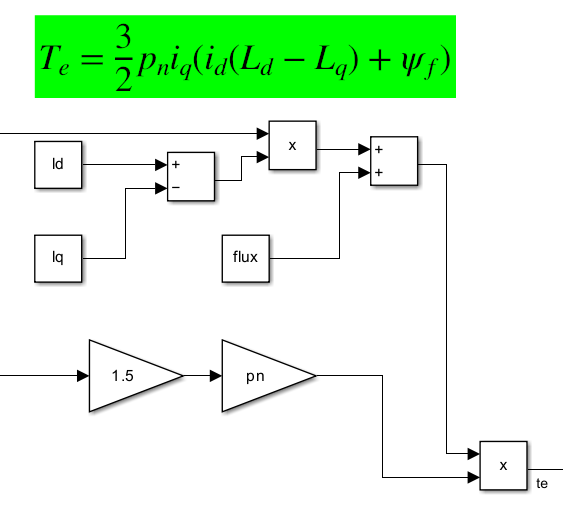
电磁转矩公式 (电机所产生的力矩):
机械运动方程 (电机所消耗的力矩):
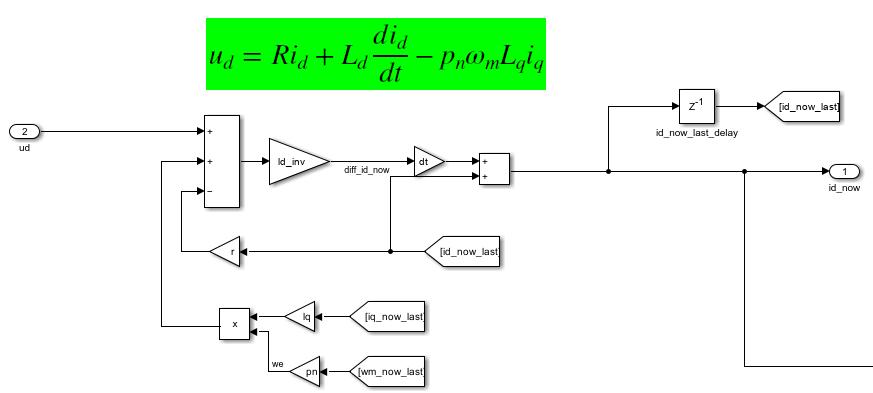
2.3.1 d 轴电压方程与仿真
= d 轴电压 (V)
= 定子电阻 (Ω)
= dq 轴电感 (H)
= dq 轴电流 (A)
= 电流变化率 (A/s)
= 极对数
= 机械角速度 (rad/s)
= 电阻压降
= 电感产生的电压
= 交叉耦合项
总结:d 轴电压 = 电阻压降 + d 轴电感动态 + 旋转耦合干扰
我们将上述公式变形可以得到:
在 Simulink 中搭建仿真:
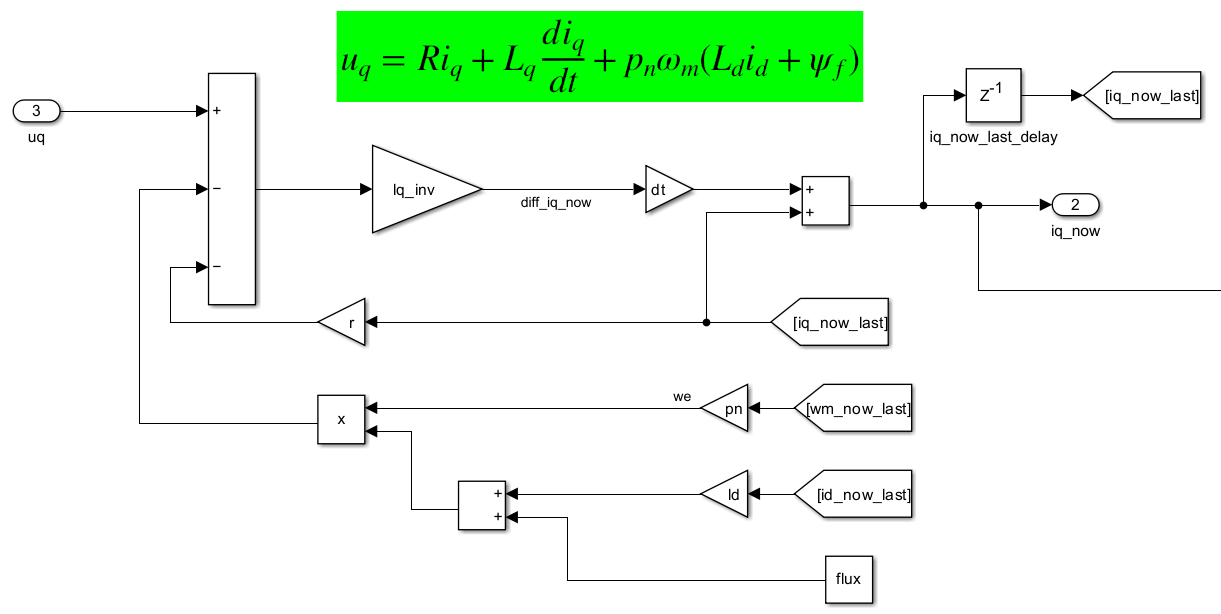
2.3.2 d 轴电压方程与仿真
= q 轴电压 (V)
= 电流变化率 (A/s)
= 永磁体磁链 (Wb)
= 电感产生的电压
= 反电动势 + 交叉耦合项
总结:q 轴电压 = 电阻压降 + q 轴电感动态 + 反电动势 + dq 耦合
我们将上述公式变形可以得到:
在 Simulink 中搭建仿真:
2.3.3 电磁转矩公式仿真
= 电磁转矩 (N·m)
= 磁阻转矩项 (电机 dq 轴磁路不对称产生额外转矩)
总结:产生的转矩本质 = 磁场 () × 电流 (
) + 磁阻效应
在 Simulink 中搭建仿真:
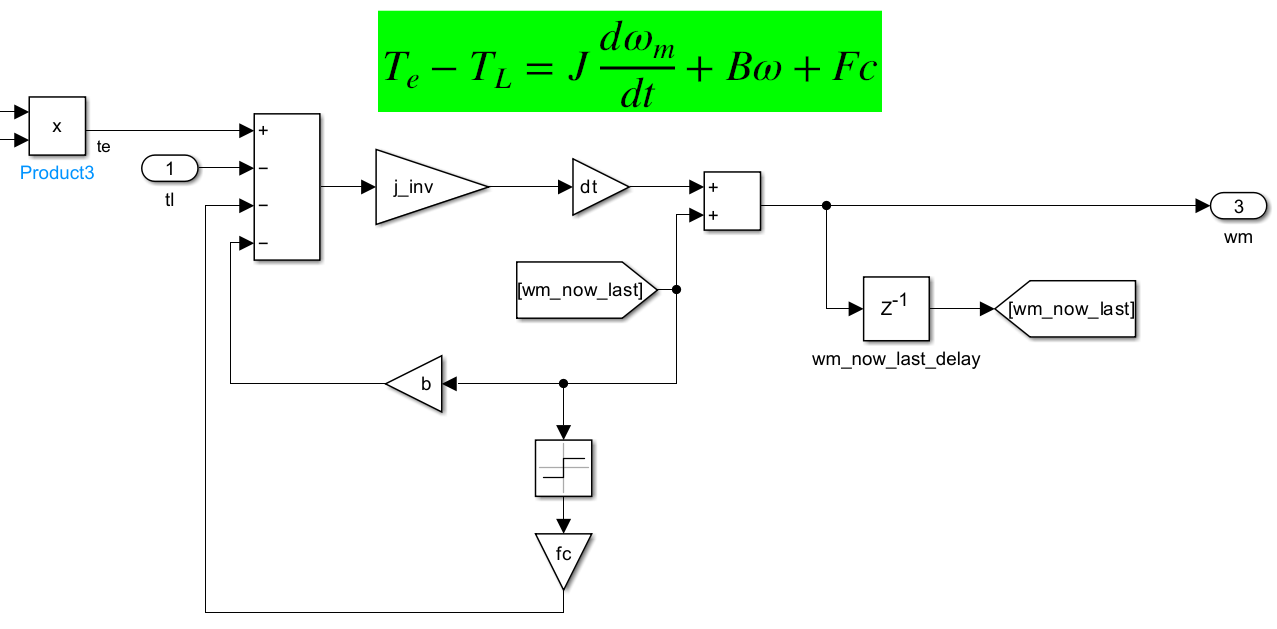
2.3.4 机械运动方程
= 负载转矩 (N·m)
= 转动惯量
= 角加速度 (rad/s²)
= 粘性摩擦系数
= 机械角速度 (rad/s)
= 库仑摩擦 (静摩擦) (N·m)
总结:电机消耗的转矩 = 加速惯性 + 摩擦 + 负载
我们将上述公式变形可以得到:
在这里,我们将输出力矩 Te 和 负载的 tl 输入,得到 wm 机械转速。
在 Simulink 中搭建仿真:
2.4 dis_int_wm 模块解析
dis_int_wm 模块是角速度积分器,对机械转速积分后得到机械角度。
- 输入:wn (机械转速)
- 输出:real_pos_now (机械角度)
2.5 总结
至此,我们便总结完整个 PMSM 电机的仿真模型了。
2.5.1 模型输入
uabc_tar:
- 简述:三相电压指令 (或 PWM 等效电压)
- 类型:abc 三相
- 来源:PWM 等效电压或控制器输出
tl:
- 简述:负载转矩 (Torque Load)
- 单位:N·m
- 作用:外界阻力,机械负载、摩擦、风阻
2.5.2 模型输出
iabc_now:
- 简述:当前电机三相电流输出
- 用于:控制反馈、示波观察
wm_now:
- 简述:机械转速
- 单位:rad/s
real_elec_angle_now:
- 简述:电角度
- 范围:0 ~ 2π
real_pos_now:
- 简述:机械角度
- 范围:0 ~ 2π

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)