国内外类似Semantic Scholar的免费文献溯源工具(2026年总结)
国内外类似Semantic Scholar的免费文献溯源工具(2026年总结)
写学术论文,很多时候,在某个领域中,哪一篇论文才是该领域面向某一问题的核心节点论文呢?如果不知道,自然无法追寻到该领域大佬以及最新进展。所以,我们希望通过探寻一篇文章相关的引文网络,直至溯源到高被引核心论文,所以我们需要一个文献溯源工具,再结合AI功能,能够提炼主要观点。
写论文最优AI工具组合使用:百度学术/知网(中文)+ OpenAlex(英文)+ Connected Papers(可视化)+ Elicit(AI),覆盖全场景。
为什么想写这篇文章呢?其实原因如下:
就是文献溯源工具Semantic Scholar在国内经常无法访问。
国内外有大量完全免费、可直接替代Semantic Scholar的文献溯源工具,核心能力覆盖AI检索、引文网络、高被引溯源、全文获取、引用分析,且多数国内可稳定访问。以下按国外主流免费工具、国内免费工具、AI增强型免费工具三大类,详细拆解功能、用法、适用场景,并附消费级无人机路径规划实战对比,帮你快速选型。
一、国外主流免费文献溯源工具(对标Semantic Scholar)
1. OpenAlex(最接近Semantic Scholar的开源学术图谱)
官网:https://openalex.org/,优先推荐
核心定位:完全开源、免费、无墙的学术知识图谱,对标Semantic Scholar+Microsoft Academic Graph,是当前最火的免费学术基础设施。
核心能力(溯源/检索双强):
(1)收录2.7亿 + 学术作品(论文、预印本、专利、数据集),覆盖所有学科,引文关系超40亿条;
(2)支持DOI/标题/作者/关键词检索,一键查看参考文献、被引文献、相似文献、作者网络、机构网络;
(3)提供免费 API,可批量获取文献元数据、引文数据,支持本地二次开发;
(4)内置高被引筛选、时间趋势、学科聚类,快速定位领域“地基论文”;
(5)全文链接直达arXiv、PMC、DOAJ等OA平台,80%+文献可免费获取。
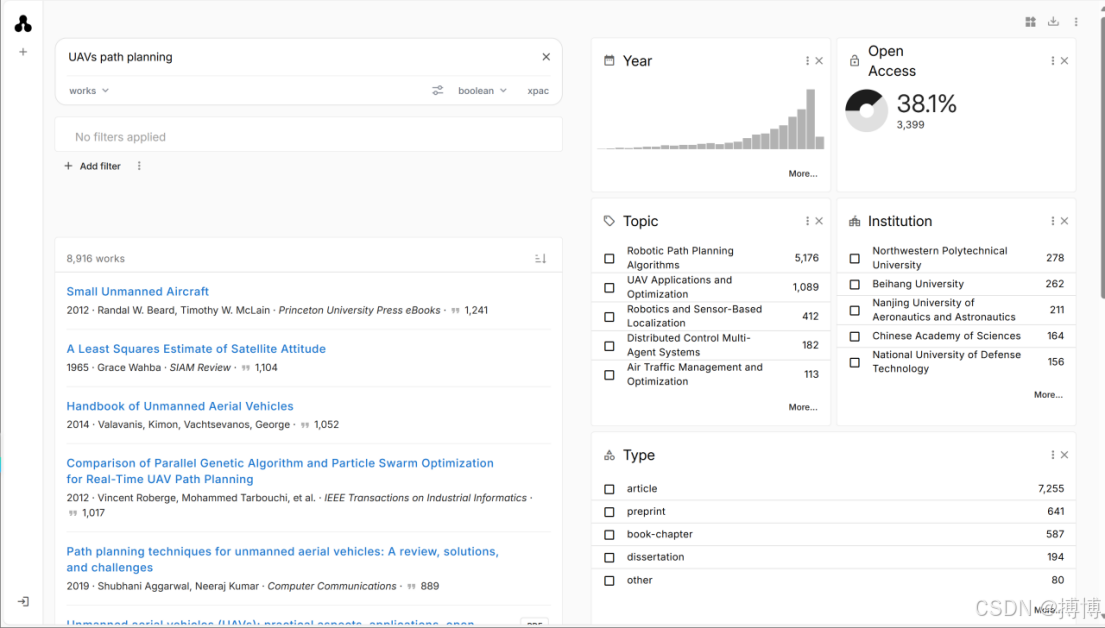
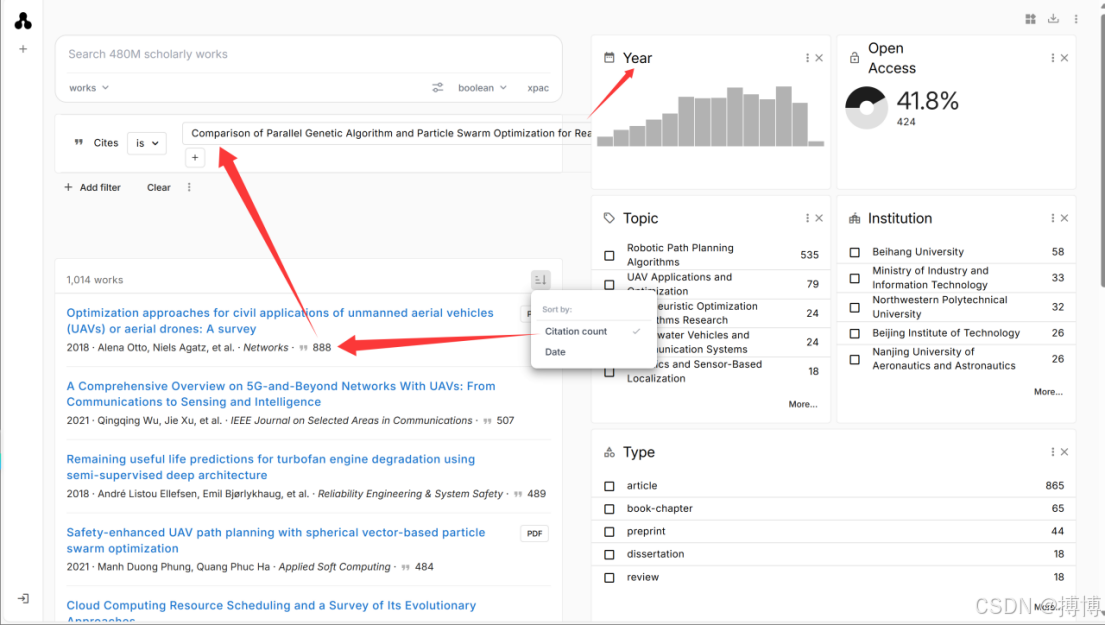
消费级无人机路径规划实战:输入“Path Planning Algorithms for UAV”,可直接导出200 + 核心文献,按被引排序快速锁定《UAV Path Planning Using Optimization Approaches: A Survey》(被引200+),并查看其所有前驱/后继文献,生成完整引文脉络;支持导出BibTeX,直接用于写作。优势:开源无广告、数据完整、API免费、国内可直连;劣势:无AI自动摘要,需手动精读。
2. Google Scholar(谷歌学术,全球覆盖最广)
官网:https://scholar.google.com/
(国内可用镜像:https://scholar.google.com.hk/,也可能访问不了)
核心定位:全球最大免费学术搜索引擎,“万能检索+基础溯源”,所有研究者必备。
核心能力:
(1)收录超3亿文献,覆盖期刊、预印本、学位论文、专利、图书章节,无学科限制;
(2)一键查看被引次数、被引文献、相关文章、引用格式,支持“被引排序”快速找高被引经典;
(3)提供“被引文献”“相关文章”双溯源路径,可层层追溯领域源头与前沿;
(4)支持批量导出BibTeX/RIS,兼容所有文献管理软件;
(5)免费版无检索次数限制,40%+文献可直接免费下载(OA/预印本)。
消费级无人机路径规划实战:搜索“消费级无人机 路径规划”,按“被引次数”排序,快速定位国内高被引核心论文(如《无人机三维路径规划算法综述》);点击“被引文献”,查看2023-2026年最新研究,追踪领域前沿;点击“相关文章”,发现“无人机集群路径规划”“轻量化算法”等细分方向。优势:覆盖最广、操作极简、国内可镜像访问;劣势:无AI语义分析、引文数据不如OpenAlex完整、广告较多。
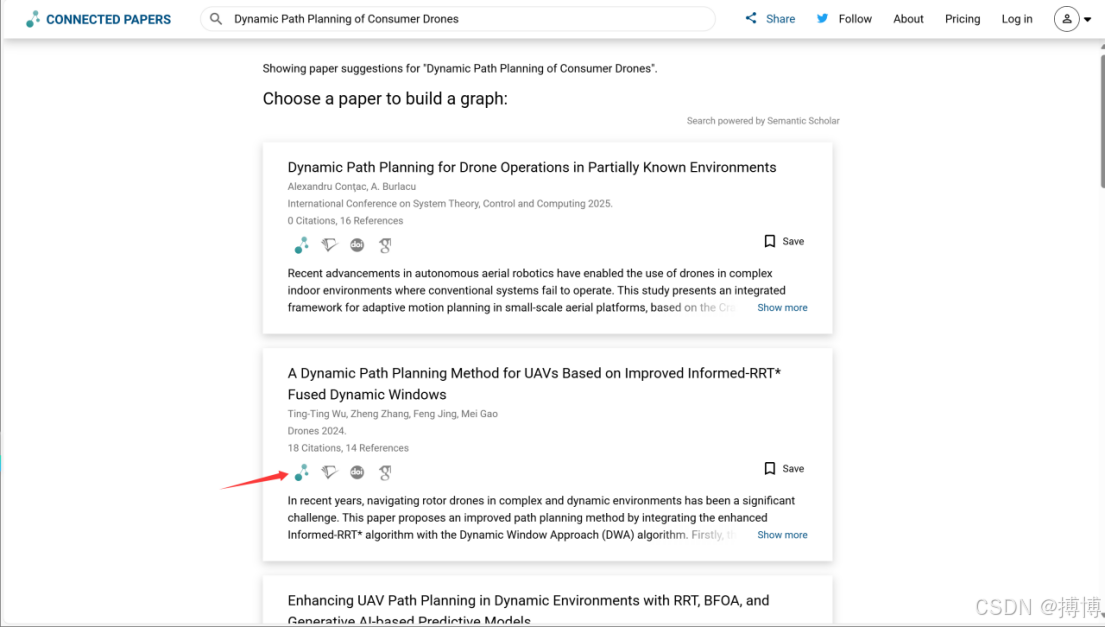
3. Connected Papers(可视化溯源+文献网络,免费基础版)
官网:https://www.connectedpapers.com/
核心定位:以“种子论文”为核心的可视化文献网络工具,免费版可满足基础溯源需求。
核心能力:
(1)输入1篇种子论文,自动生成交互式引文网络图谱,节点=文献、连线=引用/相似关系、大小=被引次数;
(2)图谱按时间线聚类,清晰展示领域发展脉络(传统→启发式→AI算法);
(3)一键查看前驱文献(参考文献)、后继文献(被引)、相似文献,快速定位核心文献簇;
(4)免费版每日可生成5个图谱,足够个人科研使用;付费版解锁无限图谱、批量导出。
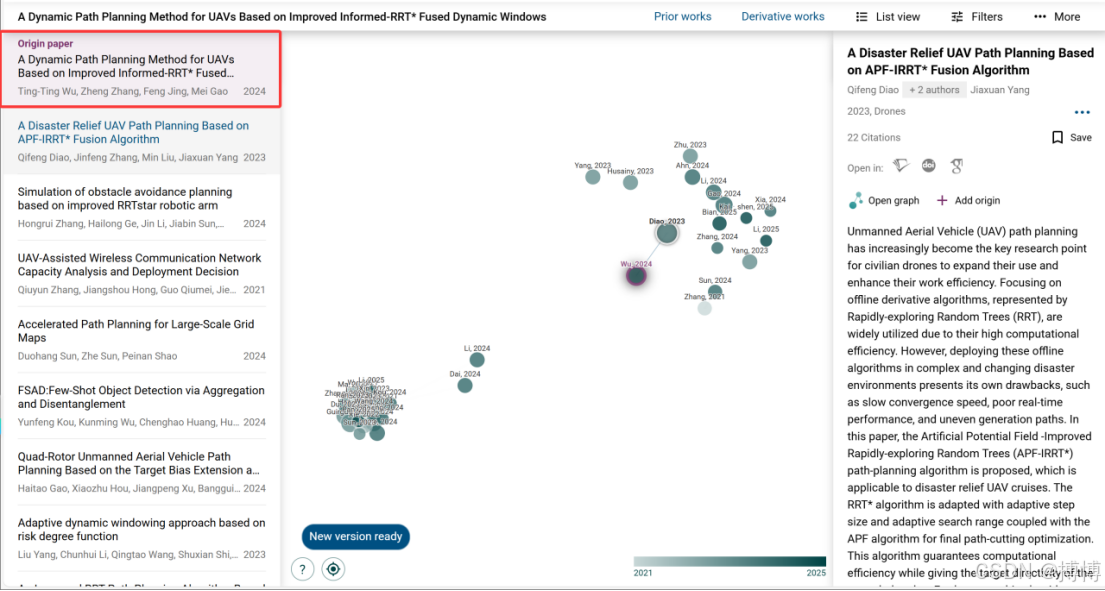
消费级无人机路径规划实战:以《A Dynamic Path Planning Method for UAVs Based on Improved Informed-RRT* Fused Dynamic Windows》为种子,生成图谱后,可直观看到:
(1)左侧:传统A*、蚁群算法等前驱文献(领域基础);
(2)右侧:2024-2026年轻量化DRL、多传感器融合等后继文献(前沿);
(3)中间:Informed-RRT* + 无人机路径规划的核心文献簇(研究热点)。优势:可视化强、脉络清晰、国内可直连;劣势:免费版次数有限、无批量检索、无全文下载。
4. Scite.ai(引文上下文分析+证据溯源,免费版够用)
官网:https://scite.ai/,访问不稳定

核心定位:专注引文质量与上下文的免费工具,解决“只看被引数、不看引用意图”的痛点。
核心能力:
(1)收录1.2亿+论文,分析每篇文献的引用类型:支持(Citing Supporting)、对比(Citing Contrasting)、提及(Mentioning);
(2)一键查看某篇论文被支持/反对的次数,快速判断领域共识与争议;
(3)溯源引用上下文片段,直接查看其他论文如何评价/使用目标文献;
(4)免费版每日可检索10次,支持导出引文分析报告。
消费级无人机路径规划实战:检索“A*算法 vs 强化学习 无人机路径规划”,Scite会显示:
(1)支持强化学习的文献:62篇(动态场景避障更优);
(2)支持A*算法的文献:31篇(静态场景效率更高);
(3)直接查看每篇引用的上下文片段,验证观点可信度。优势:引文分析深度强、证据溯源精准;劣势:覆盖量不如OpenAlex、免费版次数有限。
5. CORE(全球最大OA文献库,免费全文+溯源)
核心定位:专注开放获取(OA)文献的免费引擎,全文获取率最高。
核心能力:
(1)收录3.62亿+OA文献,来自1.3万+出版社/机构,100%可免费下载全文;
(2)支持关键词、作者、DOI检索,一键查看参考文献、被引文献、相似文献;
(3)提供文献元数据批量导出,适合快速构建文献库。优势:全文免费、覆盖极广;劣势:非OA文献无法获取、无AI分析。
二、国内免费文献溯源工具(中文文献首选)
1. 百度学术(中文文献溯源天花板)

核心定位:国内最大免费学术搜索引擎,中文文献覆盖最全,对标Google Scholar。
核心能力:
(1)收录超2亿文献,覆盖中文期刊、学位论文、会议论文、预印本、专利,同时整合英文文献(可用的论文不多,毕竟很多学术期刊来源不是OA,导致无法获取);
(2)一键查看被引次数、被引文献、参考文献、相似文献、引用格式,支持“被引排序”找高被引中文核心;
(3)提供免费全文链接(OA/机构共享/预印本),70%+中文文献可免费获取;
(4)内置AI论文助手,自动生成摘要、综述提纲、研究空白;
(5)支持批量导出BibTeX/GB/T 7714,适配中文写作规范。
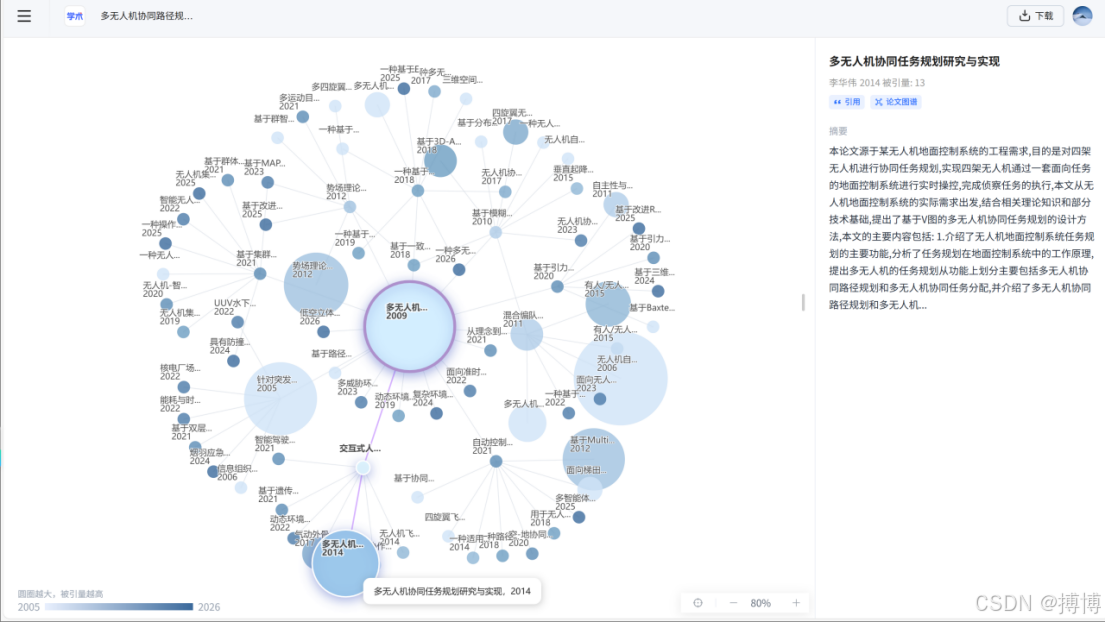
消费级无人机路径规划实战:搜索“消费级无人机路径规划”,按“被引次数”排序,快速锁定中文核心综述《多无人机协同路径规划研究综述》(被引40+);查看其参考文献,追溯国内领域源头;查看被引文献,追踪2023-2026年国内最新研究(如轻量化算法、城市低空应用);导出GB/T 7714格式参考文献,直接用于中文论文写作。优势:中文最全、无墙、免费、AI辅助、国内稳定;劣势:英文文献覆盖不如OpenAlex、引文数据略少。

点击该论文的“论文图谱”,可以清晰的看到引用关系和关键程度。
2. 中国科技论文在线(教育部直属,免费OA+溯源)

核心定位:教育部主管的免费学术发布与检索平台,聚焦中文科技文献。
核心能力:
(1)收录超100万篇中文科技论文,全部免费下载全文;
(2)支持关键词、作者、单位、学科检索,一键查看参考文献、被引文献;
(3)提供预印本发布功能,快速获取国内最新研究;
(4)适合中文科技领域(如无人机、人工智能)的基础溯源。优势:官方权威、全文免费、无墙;劣势:覆盖量不如百度学术、无AI分析。
3. 知网研学(CNKI免费版,中文核心溯源)
核心定位:知网旗下免费学术工具,可检索CNKI核心文献,支持基础溯源。
核心能力:
(1)免费检索CNKI全部文献元数据(标题、作者、摘要、被引、参考文献);
(2)一键查看高被引文献、核心期刊、学科聚类,快速定位中文核心;
(3)支持导出参考文献格式(GB/T 7714),免费版可满足基础写作需求;
(4)全文需机构账号,但元数据与溯源功能完全免费。优势:中文核心权威、溯源精准;劣势:全文需付费/机构权限、无AI功能。
4. 万方数据知识服务平台(免费版,中文文献溯源)
官网:https://www.wanfangdata.com.cn/
核心定位:万方旗下免费检索平台,覆盖中文期刊、学位论文、会议论文。
核心能力:
(1)免费检索全部文献元数据,查看被引次数、参考文献、相似文献;
(2)支持学科聚类、时间筛选、被引排序,快速定位核心文献;
(3)导出GB/T 7714格式参考文献,免费版够用。优势:中文文献覆盖广、官方权威;劣势:全文需付费、无AI分析。

三、AI增强型免费文献溯源工具
1. Elicit(AI+文献溯源,中英文友好,免费版)
官网:https://elicit.org/,国内需要工作邮箱登录,或是github账号登录。
核心定位:AI驱动的文献检索+摘要+溯源工具,对标Semantic Scholar的AI能力,中文适配好。
核心能力:
(1)输入自然语言问题(如“消费级无人机路径规划的核心难点是什么”),自动筛选高相关文献;
(2)生成结构化摘要(研究目的、方法、结果、结论),批量对比文献;
(3)一键查看参考文献、被引文献、相似文献,快速溯源;
(4)免费版每日可检索50次,支持导出文献列表与摘要。
消费级无人机路径规划实战:输入“消费级无人机动态路径规划 强化学习 vs 传统算法”,Elicit自动筛选50篇核心文献,生成对比表格:
(1)强化学习:优势(动态避障优)、劣势(计算复杂)、代表文献(Smith 2023);
(2)传统算法:优势(效率高)、劣势(动态适应性差)、代表文献(Zhang 2012);
(3)一键溯源每篇文献的参考文献与被引,快速构建综述框架。优势:AI强大、中英文友好、操作极简;劣势:免费版次数有限、覆盖量不如OpenAlex。
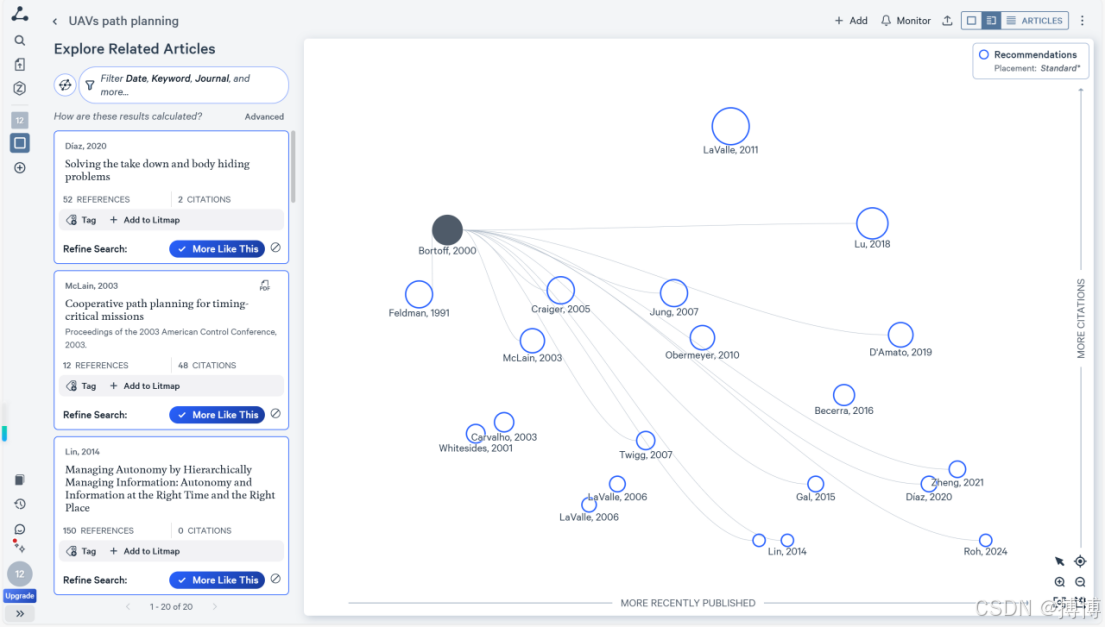
2. Litmaps(可视化溯源+AI分析,免费基础版)
官网:https://app.litmaps.com/,访问不稳定
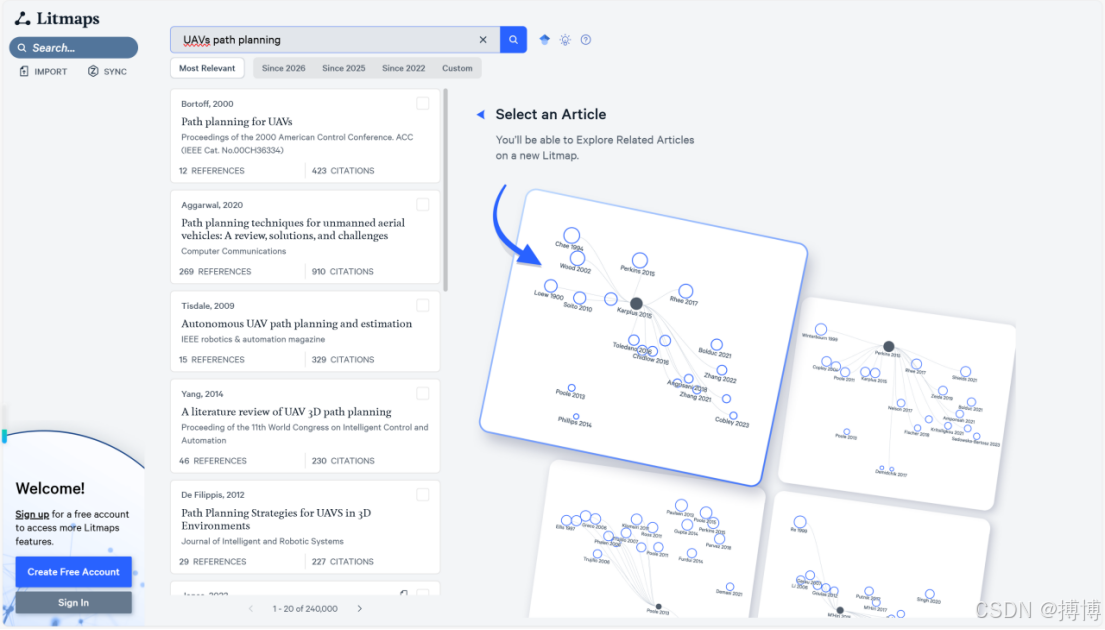
核心定位:AI驱动的文献地图工具,免费版可生成1个文献库,满足基础溯源。
核心能力:
(1)导入种子论文/DOI,自动生成文献引用地图(参考文献+被引文献);
(2)AI自动聚类研究主题(如传统算法、强化学习、城市应用);
(3)一键查看高被引核心文献、时间趋势、研究空白;
(4)免费版支持1个文献库、无限次图谱查看。优势:可视化+AI双强、国内可直连;劣势:免费版库数量有限、无全文下载。
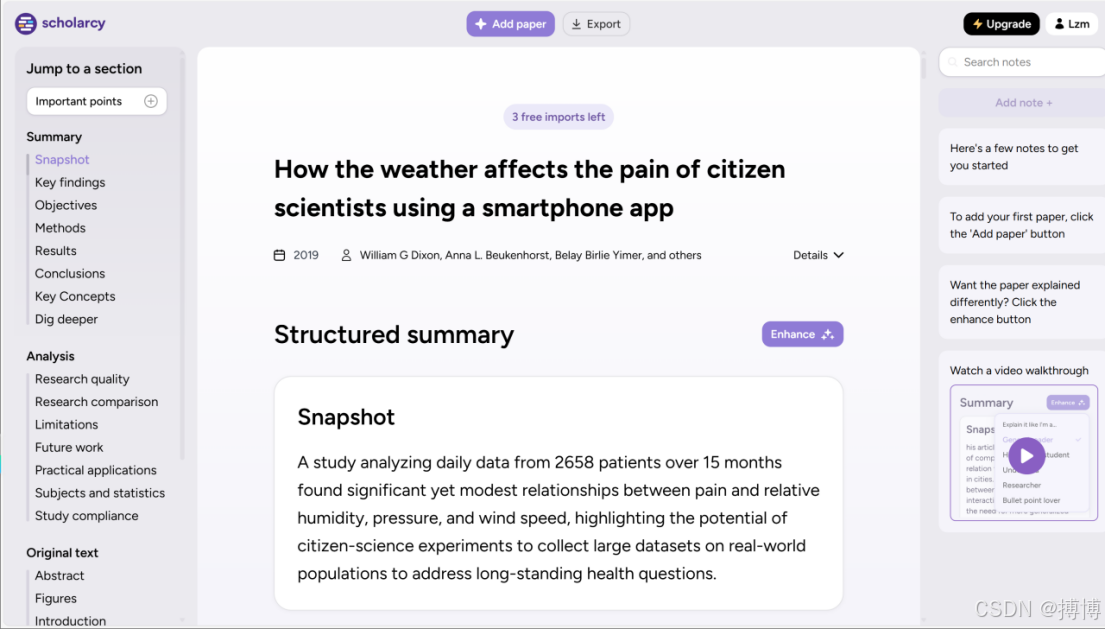
3. Scholarcy(AI摘要+溯源,免费版)
核心定位:专注文献自动摘要+元数据提取+溯源的AI工具,免费版够用。
核心能力:
(1)上传PDF/输入DOI,自动生成结构化摘要(核心观点、方法、结果);
(2)提取参考文献、被引文献、相似文献,快速溯源;
(3)支持批量处理文献,生成综述素材库;
(4)免费版每日可处理10篇文献。优势:AI摘要精准、溯源便捷;劣势:免费版次数有限、无可视化。
四、工具对比与选型指南
1. 核心能力对比表
|
工具 |
收录量 |
溯源能力(引文 / 相似) |
AI 功能 |
全文获取 |
国内访问 |
免费限制 |
适用场景 |
|
OpenAlex |
2.7 亿 + |
★★★★★(最强) |
★★☆(基础) |
★★★★(80%+) |
直连 |
无 |
英文文献深度溯源、API 批量 |
|
Google Scholar |
3 亿 + |
★★★★ |
★★(无) |
★★★(40%+) |
镜像 |
无 |
全球文献快速检索、基础溯源 |
|
Connected Papers |
2 亿 + |
★★★★★(可视化) |
★★★(基础) |
★★(链接) |
直连 |
日 5 图谱 |
文献网络可视化、脉络梳理 |
|
Scite.ai |
1.2 亿 + |
★★★★★(上下文) |
★★★★(证据) |
★★(链接) |
直连 |
日 10 次 |
共识 / 争议分析、引文质量 |
|
百度学术 |
2 亿 + |
★★★★ |
★★★★(AI 助手) |
★★★★(70%+) |
直连 |
无 |
中文文献溯源、中文写作 |
|
Elicit |
1.5 亿 + |
★★★★ |
★★★★★(最强) |
★★★(链接) |
直连 |
日 50 次 |
AI 辅助综述、中英文混合 |
|
Semantic Scholar |
2.14 亿 + |
★★★★★ |
★★★★(AI 摘要) |
★★★★(80%+) |
直连 |
无 |
英文 AI 溯源、计算机 / AI 领域 |
2. 消费级无人机路径规划选型建议
(1)中文研究首选:百度学术(中文最全、免费、AI 辅助、GB/T 7714 导出);
(2)英文研究首选:OpenAlex(开源、数据完整、引文最强、免费 API);
(3)可视化脉络梳理:Connected Papers(种子论文生成图谱,清晰展示领域发展);
(4)AI 辅助综述:Elicit(自然语言检索、结构化摘要、批量对比);
(5)引文质量分析:Scite.ai(支持 / 反对统计,验证共识与争议);
(6)组合使用(最优):百度学术/知网(中文)+ OpenAlex(英文)+ Connected Papers(可视化)+ Elicit(AI),覆盖全场景。
五、实战工作流
1.共识验证:用Elicit输入 “消费级无人机路径规划 核心难点”,快速获取领域共识;
2.文献溯源:
(1)中文:百度学术检索,按被引排序,锁定中文核心综述与高被引论文;
(2)英文:OpenAlex检索,导出核心文献,查看引文脉络;
3.可视化梳理:Connected Papers导入种子论文,生成文献网络图谱,梳理领域发展脉络;
4.批量精读:Elicit批量导入文献,生成结构化摘要,提炼核心观点;
5.引用校验:Scite.ai校验引用上下文,确保观点可信;
6.写作输出:百度学术 / OpenAlex导出参考文献,直接用于写作。
六、总结
国内外免费文献溯源工具已完全可替代 Semantic Scholar,且各有侧重:OpenAlex是英文开源溯源首选,百度学术是中文溯源天花板,Connected Papers擅长可视化,Elicit主打AI效率。针对消费级无人机路径规划等具体领域,组合使用2-3款工具,即可实现精准溯源、高效梳理、高质量写作,全程免费、无墙、稳定。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)