LDO内部为什么要使用NOMS,而不是POMS?
首先,uu是查阅资料加上个人理解,以及运用部分ai工具,将给出解答。
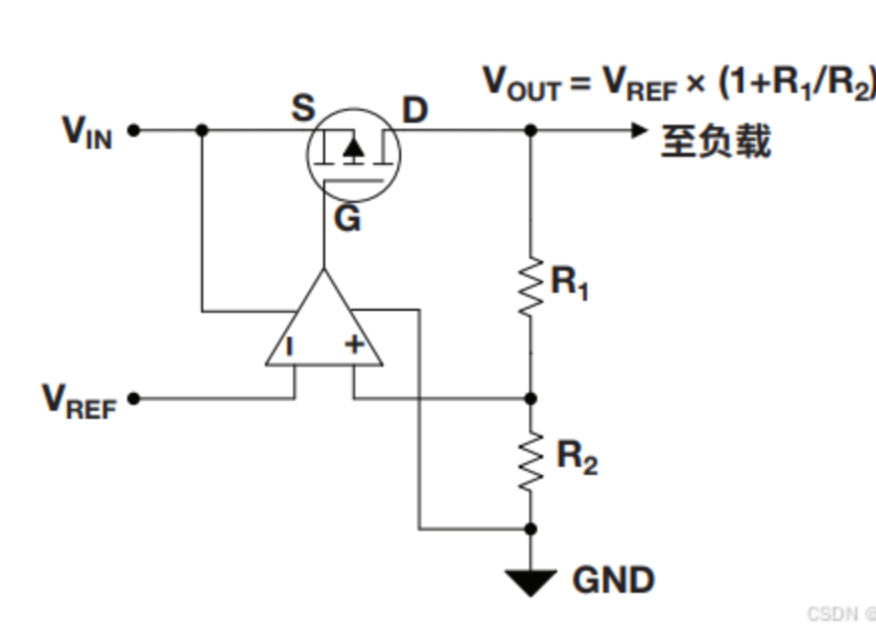
· LDO(poms)的结构图一般如上图所示,由于LDO中文名称为:低压差线性稳压电源,故此时POMS 工作在线性区域,此时Vin=Vout+Io*Rds(on)
LDO 内部常用 PMOS 作调整管(Pass Device),核心原因是:驱动简单、无需升压、天生低压差、电路成本低;而 NMOS 必须栅极高于输出才能导通,需要电荷泵 / 自举,压差大、结构复杂
一、导通与驱动原理(最关键)
1. PMOS 架构(LDO 主流)
- 接法:源极 S → Vin,漏极 D → Vout,栅极 G ← 误差放大器
- 导通条件:VGS=VG−VS<−∣Vth∣→ 只要把栅极电压 拉低到 Vin 以下 即可导通
- 驱动:误差放大器输出在 0~Vin 之间就足够控制,不需要高于 Vin 的电压
- 压差:Vdrop=Vin−Vout≈Iout⋅Rds(on)→ 很容易做到 几十~200mV 低压差
2. NMOS 架构(少用)
- 接法:源极 S → Vout,漏极 D → Vin,栅极 G ← 误差放大器
- 导通条件:VGS=VG−VS>Vth→ 栅极电压必须 高于输出 Vout 才能导通
- 驱动问题:
- 若 Vout 接近 Vin,则要求 VG>Vin+Vth
- 必须加 电荷泵 / 自举 / 外部偏置 产生高于 Vin 的栅压T
- 压差:Vdrop≥Vth(约 0.5~1V),天生压差大
二、PMOS 比 NMOS 更适合 LDO 的四大理由
-
驱动电路极简,成本低
- PMOS:误差放大器直接驱动,无电荷泵、无额外引脚
- NMOS:必须升压驱动,复杂度、面积、成本、静态电流上升
-
真正低压差(LDO 核心指标)
- PMOS:压差 = 导通电阻压降,可低至几十 mV
- NMOS:压差至少包含阈值电压 Vth,难做到 <300mV
-
稳定性与补偿更简单(uu最开始并不是很理解)
- PMOS:Rds(on) 偏大,输出极点低,环路易稳定
- NMOS:Rds(on) 小、带宽高、极点高,依赖电容 ESR 补偿,低 ESR 电容易不稳定
-
轻载 / 低功耗更优
- PMOS:栅极驱动电流小、静态电流 Iq 更低,则效率更高(效率=Vout*Iout/Vin*(Iout+Iq))
- NMOS:电荷泵持续工作,轻载效率差
相信大家对上述四点理由,都没有什么异议,我将会详细讲一下第3点。
1. LDO 输出极点在哪里?
LDO 输出可以看成:调整管(等效电阻) + 输出电容 → 构成一个 RC 低通极点
这里的 Req 主要就是 调整管的导通电阻 Rds (on)。
2. Rds (on) 大 → 极点频率低
- PMOS:相同尺寸下,迁移率低,Rds (on) 更大
- NMOS:迁移率高,Rds (on) 很小
所以:
- PMOS LDO:Rds 大 → fp 低
- NMOS LDO:Rds 小 → fp 高
3. 极点频率低 → 环路更容易稳定
LDO 是负反馈系统,稳定性看 增益带宽与相位裕量。
对 PMOS(Rds 大,极点低)
- 输出极点在 低频 就开始滚降增益
- 单位增益带宽(GBW)比较小
- 到达 0dB 时,相位滞后不多→ 相位裕量足,不容易振荡
对 NMOS(Rds 小,极点高)
- 输出极点在 高频 才滚降
- 环路带宽 很宽
- 到达 0dB 时,相位已经滞后很多→ 相位裕量小,容易振荡
三、明明 PMOS Rds 大、阻尼大、环路慢,为什么 LDO 瞬态响应反而比 DCDC 更快?
LDO 的 “慢” 是环路带宽慢,DCDC 的 “慢” 是开关动作慢;LDO 是线性电阻,DCDC 是开关 + 电感储能,两者根本不是一个赛道。
1. 先分清两个 “快慢”:完全不是一回事
(1)前面说的:Rds 大 → 环路慢、阻尼大
这里的 “慢” 指的是:LDO 环路的单位增益带宽(GBW)比较窄也就是:反馈系统本身的调节速度有限
但它再慢,也是模拟信号连续调节,没有延时、没有周期限制。
(2)DCDC 的 “慢”:是开关频率 + 电感惯性决定的
DCDC 是离散控制:
-
一个开关周期才采样一次、调节一次
-
电流靠电感建立,电感有电流不能突变的惯性
-
典型开关频率:几百 kHz ~ 2MHz
也就是说:DCDC 最快最快,也得等下一个周期才能反应;LDO 是实时连续反应,没有周期限制。
2. 极端对比一看就懂
负载突变:比如电流突然变大
LDO(PMOS 型)
-
输出电压刚往下掉一点点
-
误差放大器立刻调栅极 → 调 Rds → 调电流
-
全程是连续模拟调节,ns~μs 级响应
哪怕环路带宽不高,也远快于 DCDC 的开关周期。
DCDC Buck
-
输出掉电压
-
控制器检测到 → 在下一个周期加大占空比
-
电感电流慢慢爬升 → 输出才恢复
-
响应速度被 开关周期 + 电感斜率 锁死
-
典型响应:几 μs ~ 十几 μs
所以:LDO 带宽再窄,也是实时连续调节;DCDC 频率再高,也是隔一段时间才动一下。
四、什么时候会用 NMOS LDO?
- 大电流、超低压差(靠电荷泵强行压低 Vdrop)
- 要求 极低 Rds(on)、小芯片面积、快瞬态
- 可接受 复杂度、成本、功耗上升 的场景

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)