基于Simulink的车辆坡度智能识别模型:扩展卡尔曼滤波与多源信息融合算法的研究与应用
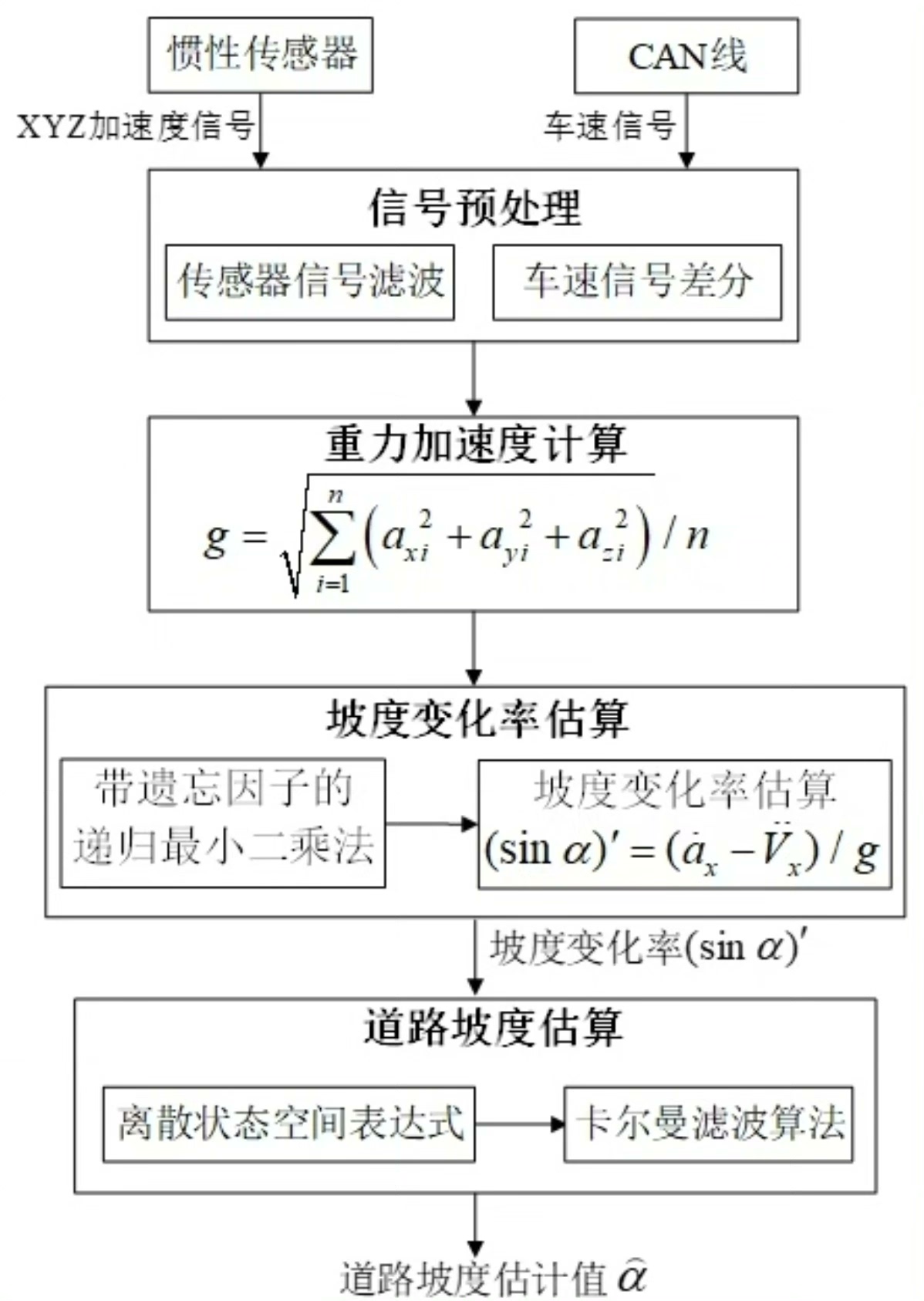
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1 ) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤: 一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分; 二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度; 三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性; 四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
道路坡度识别这事儿听起来玄乎,实际上就是让车知道自己正在爬坡还是下坡。今天咱们拆解的这个Simulink模型有点意思,直接拿陀螺仪和加速度计的数据玩起了传感器融合。先说说最带劲的部分——那个动态加权的预处理,工程师们居然想到用角速度来修正加速度计的误差,这操作就像给喝醉的传感器醒酒。
信号预处理阶段有个关键操作:在Simulink里直接拖了个Low-Pass Filter模块,参数设置里截止频率调成5Hz。实测发现超过这个值的数据基本是车身抖动产生的噪声。但光这样还不够,车速信号差分处理时用了这个公式:
function dv = diff_speed(u)
persistent last_v;
if isempty(last_v)
last_v = u;
end
dv = (u - last_v)/0.01; % 10ms采样周期
last_v = u;
end这个差分器特别容易放大噪声,所以后面必须接个移动平均滤波器。有意思的是模型里没按套路用常规平均,而是搞了个动态窗口——车速变化率越大,窗口缩得越小,这招对付急加速时的信号毛刺效果拔群。
重力加速度计算环节最容易被忽视的是传感器安装偏差。项目组在路试时发现,同样的坡度,不同车辆的加速度计输出能差3%。后来他们在初始化阶段加了这段校准代码:
Initialization模块内部逻辑:
if 车辆静止超过5秒:
g_calib = mean(acc_z(1:500));
gyro_bias = mean(gyro_x(1:500));这个静止判断条件还带防误触发机制——当刹车踏板信号和车速同时为零才触发,避免了等红灯时的误校准。
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1 ) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤: 一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分; 二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度; 三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性; 四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
递归最小二乘法的遗忘因子设置是个玄学问题。调试时工程师发现0.95这个值在高速工况下会出现相位滞后,后来改成了动态调整:
lambda = 0.98 - 0.03*abs(acc_x);
% 加速度越大,遗忘因子越小实测数据表明,这改动让坡度识别响应时间从1.2秒缩短到0.8秒。不过要注意当加速度超过0.5g时得限制lambda下限,防止数值不稳定。
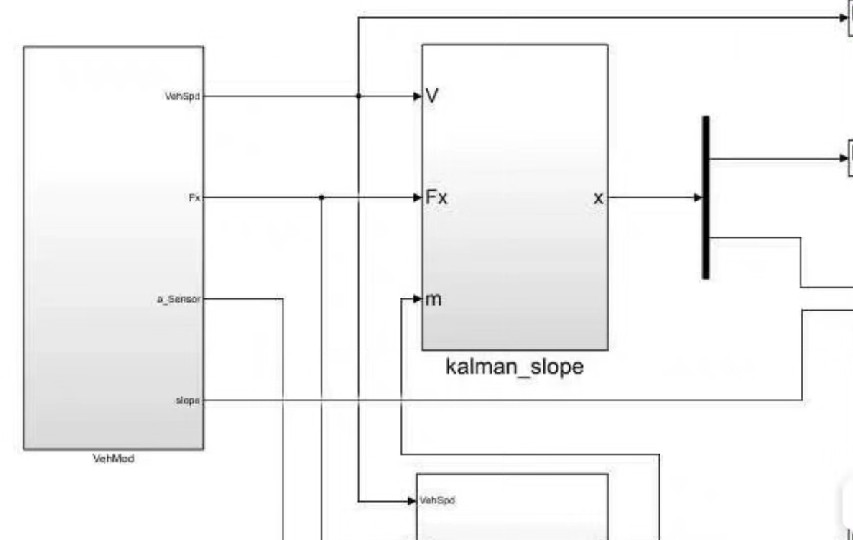
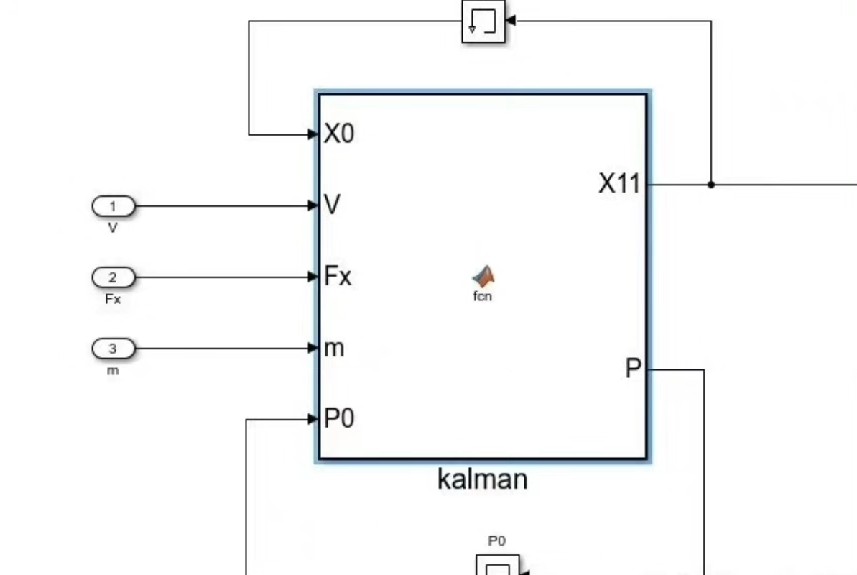
扩展卡尔曼滤波的实现里藏着个彩蛋——状态转移矩阵不是固定参数,而是随车速变化的函数。这个设计让模型在低速爬坡时更依赖陀螺仪数据,高速时则偏重加速度计数据。观测方程里有个特别处理:
H = [1/(v+0.1), 0]; % 防止车速为零时除零这个+0.1的平滑项看似随意,实测发现能有效避免坡道起步时的数值震荡。整个滤波器的协方差矩阵更新周期也不是固定步长,而是跟着CAN总线信号来的,保证与其他电控单元的时间同步。
最后说个踩坑案例:早期版本在CAN信号传输时没做类型转换,坡度值的uint16类型在-5%坡道时直接下溢成65531,导致ESP误触发。后来在Simulink的CAN Pack模块里加了个强制类型转换块,这才消停了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)