三维点云处理-特征点检测 7.1 introduction && harris 2d && harris 3d
一、特征点的提取
特征点提取课题包含提取(detector)和描述(descriptor)两部分。
提取指识别关键点或特征点,描述指对特征点及其周围信息进行量化表达。
本节内容从图像特征点入手,延伸至三维点云特征点的传统方法(如casi co),并介绍基于深度学习的点云特征点提取方法(如model)。
1.图像特征
1) 特征点检测
特征点指图像中关键或显著的点,如角点或特定区域(如向日葵的中心圆)。通常定义为单个像素点(二维图像)或三维点云中的点,但部分方法将区域整体视为特征点。特征点检测(detection)用于定位特征点位置。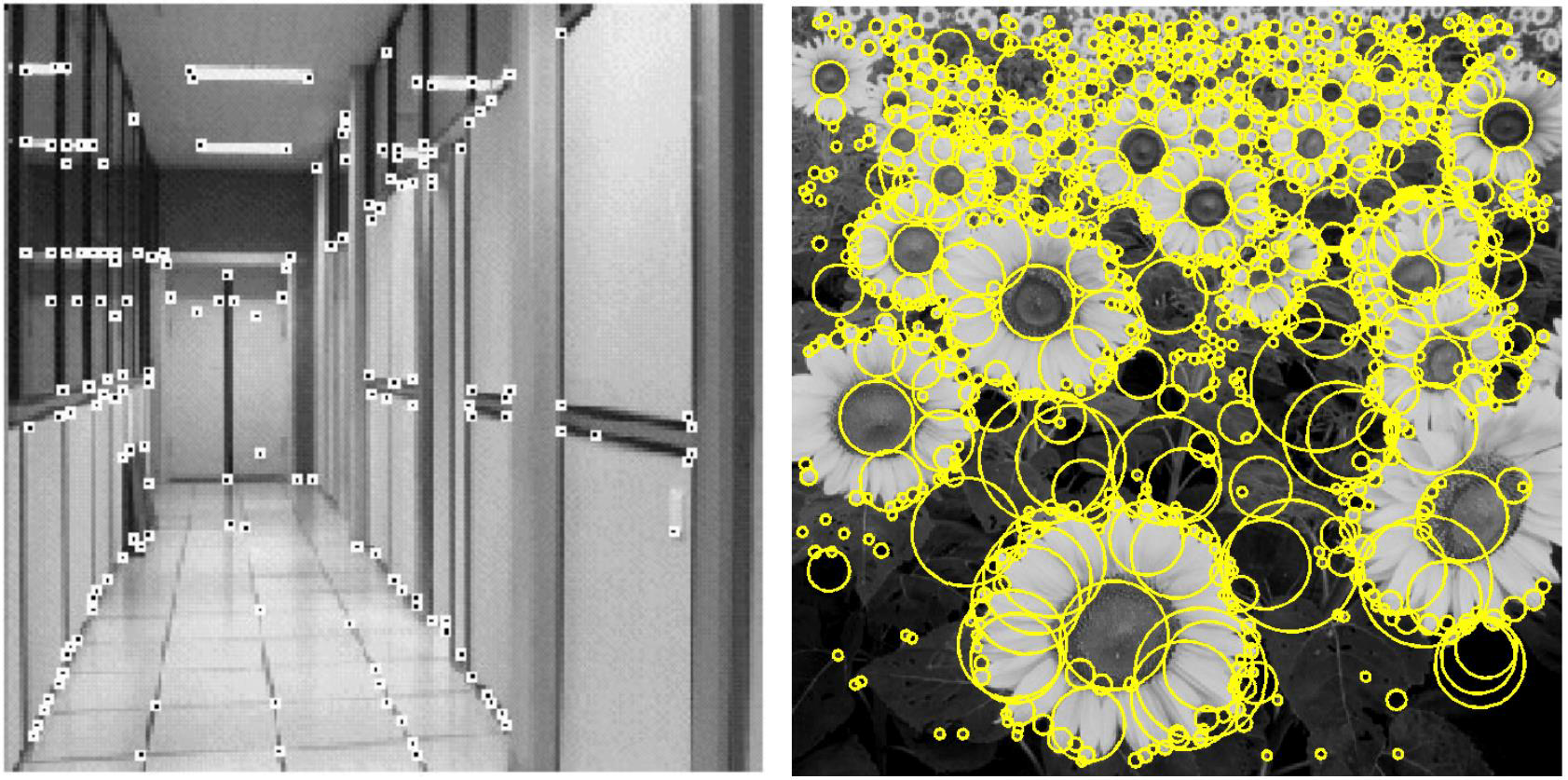
2) 特征点的描述
特征点描述将特征点及其周围信息编码为向量(如SIFT描述子)。通过量化局部特征(如梯度方向、强度分布),生成唯一描述符,便于后续匹配。
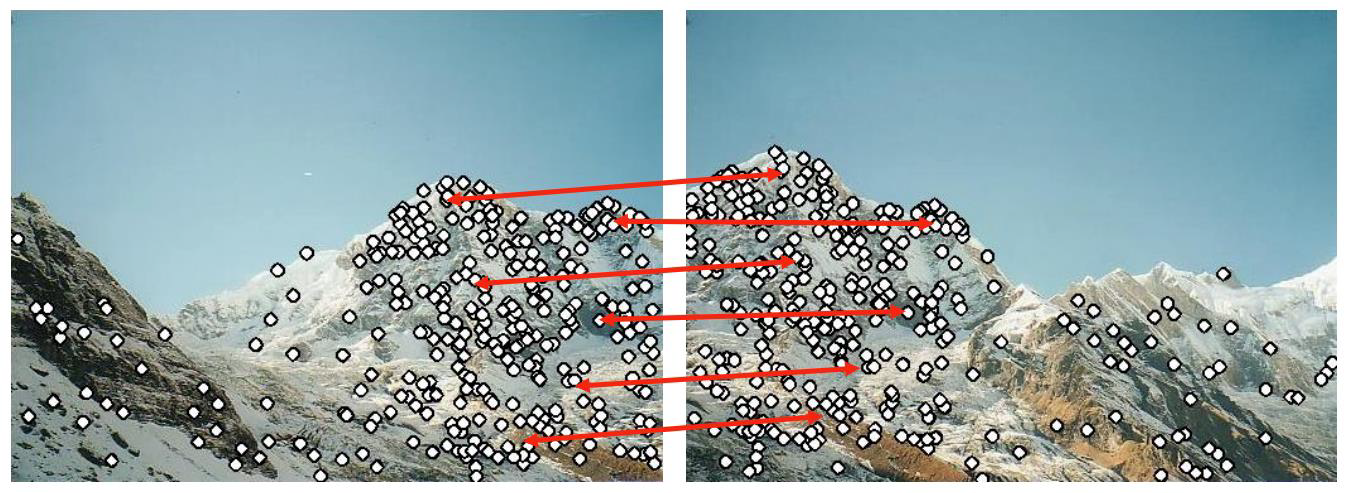
3) 特征点的匹配
特征点匹配通过比较描述向量(如欧氏距离)建立不同图像中特征点的对应关系。应用包括全景图合成(对齐多张图像)和SLAM(稀疏地图构建)。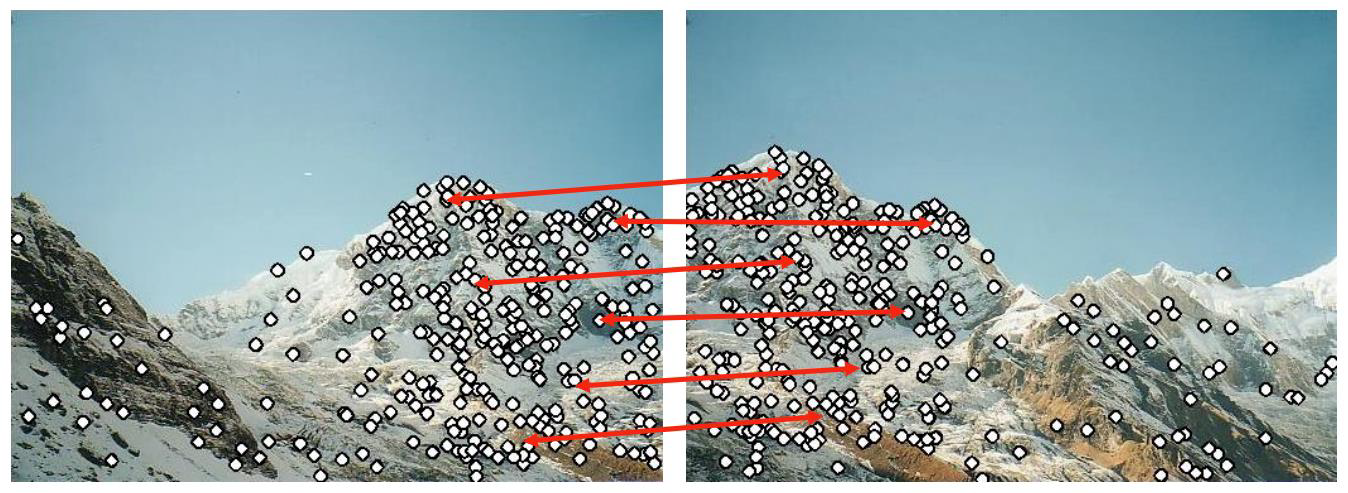
4) 应用案例
-
例题:全景图应用
-
全景图合成通过特征点匹配对齐多张图像,结合混合(blending)技术消除曝光差异或镜头畸变。

-
例题:SLAM应用
基于特征的SLAM(如ORB-SLAM)通过提取稀疏特征点构建三维地图(仅保留显著点,如物体边缘)。定位通过特征点深度估计相机位姿(图中方框),构图生成特征点的三维坐标(稀疏点云)。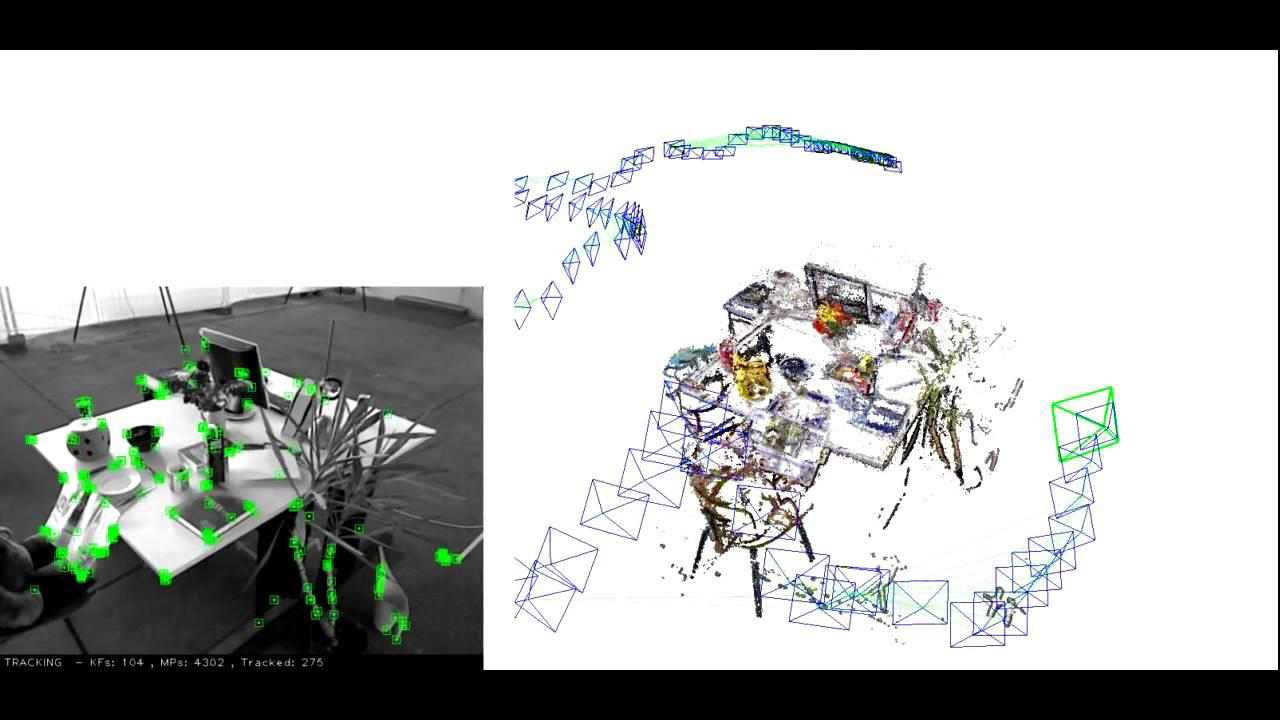
2.三维点云特征
三维特征点(如深度学习提取的UC特征点)多分布于结构显著区域(如CAD模型的桌角、激光雷达扫描的墙角)。角点检测是经典方法,但RGB-D数据中可能存在噪声(如平整区域误检)。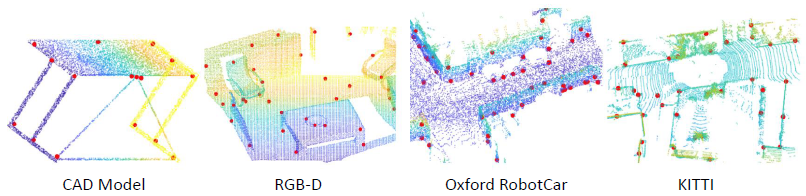
1) 配准
特征点可用于点云配准(匹配两片点云)。相比ICP算法,特征点方法对初始位姿要求更低,且适用于重合率较低的场景。特征描述与匹配(第九课内容)是配准的核心步骤。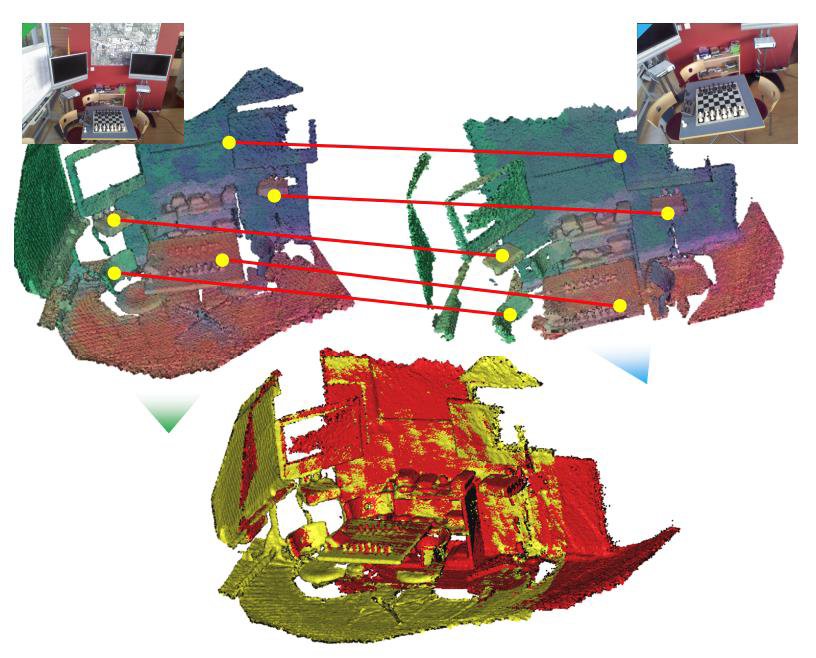
2) 物体6D定位
刚性物体定位通过匹配模型与场景的特征点,计算6D位姿(旋转+平移)。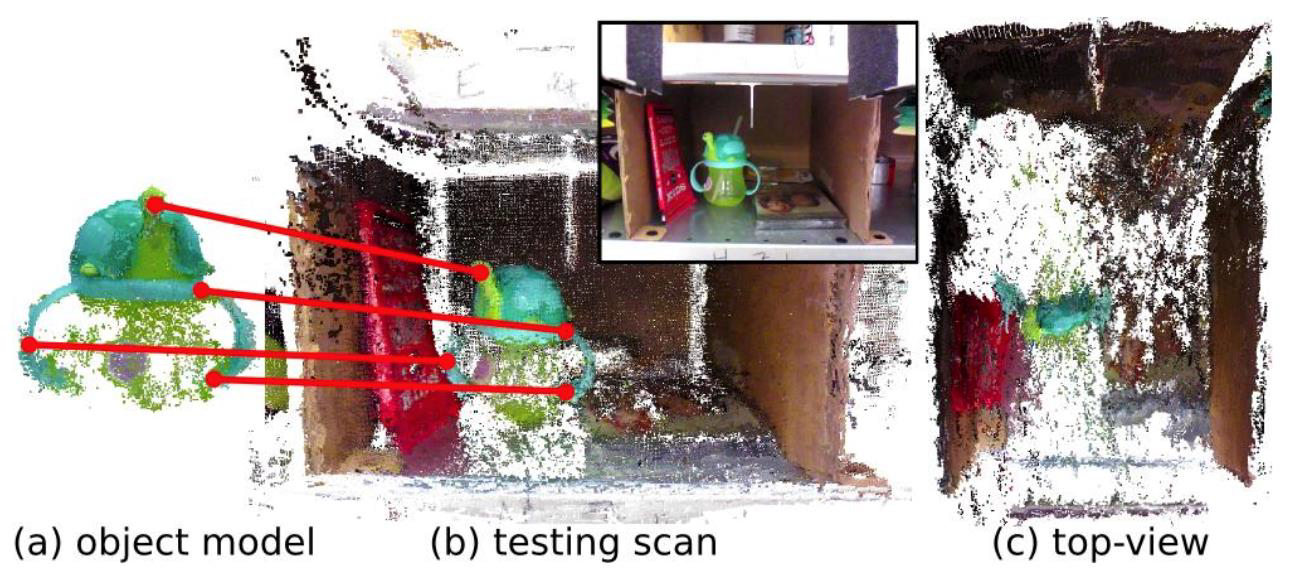
3) 数字人驱动
数字人驱动依赖人脸特征点(如嘴角、眼角)的非刚性匹配,将二维视频表情迁移至三维模型。该技术广泛应用于直播与短视频,但需解决姿态与表情变化的挑战。
4) 应用案例
- 例题:点云特征提取应用
- 特征点可编码空间信息(如核弹排列象征坐标),但需结合具体场景定义特征语义。
3.点云特征检测方法
特征点提取方法包括:
- 二维启发:Harris角点、SIFT、ORB(重点讲解Harris算法)
- 三维原生:ISS(基于点云结构)
- 深度学习:受限于标注数据稀缺(特征点定义模糊)
1) Harris检测器
Harris角点检测核心思想是通过局部窗口(patch)移动评估区域独特性。角点需满足:任意方向移动均导致窗口内容显著变化。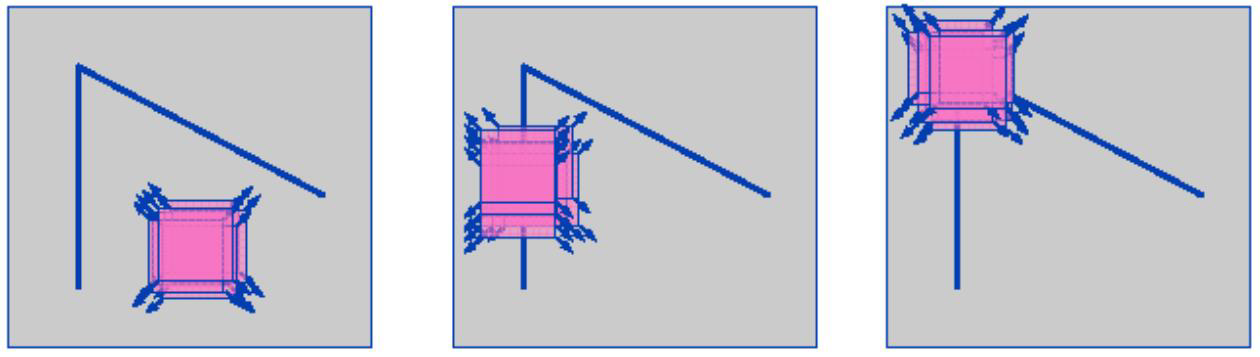
- patch匹配
独特patch需满足:移动后内容变化明显(如角点、交界点)。空白区域因无变化被排除。
- 角点
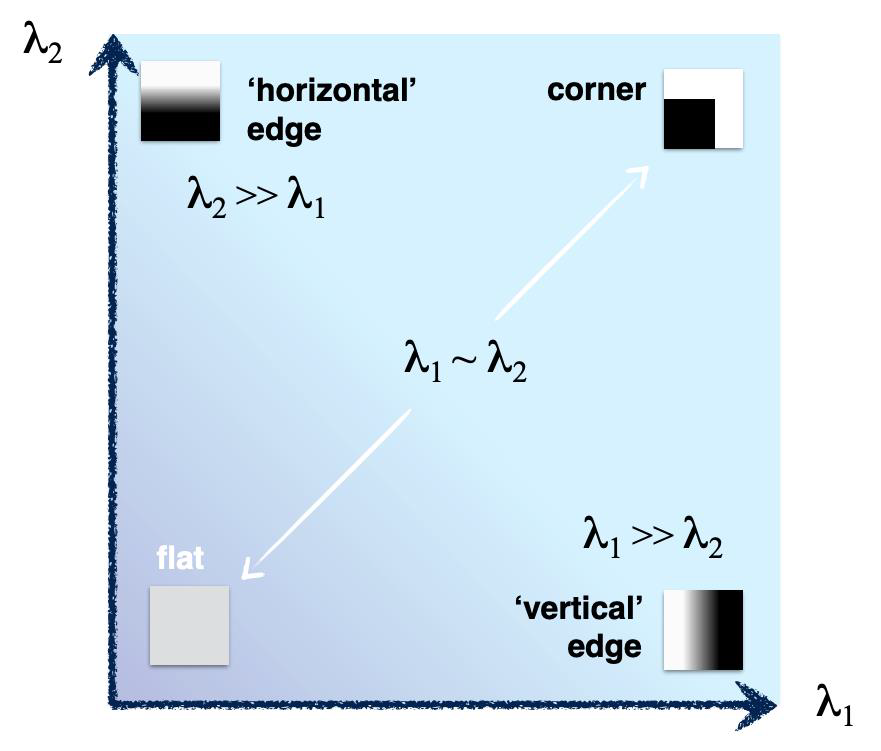
角点数学定义:若窗口在x/y方向移动均引起强度(intensity)变化,则为角点;仅单方向变化为边缘;无变化为平坦区域。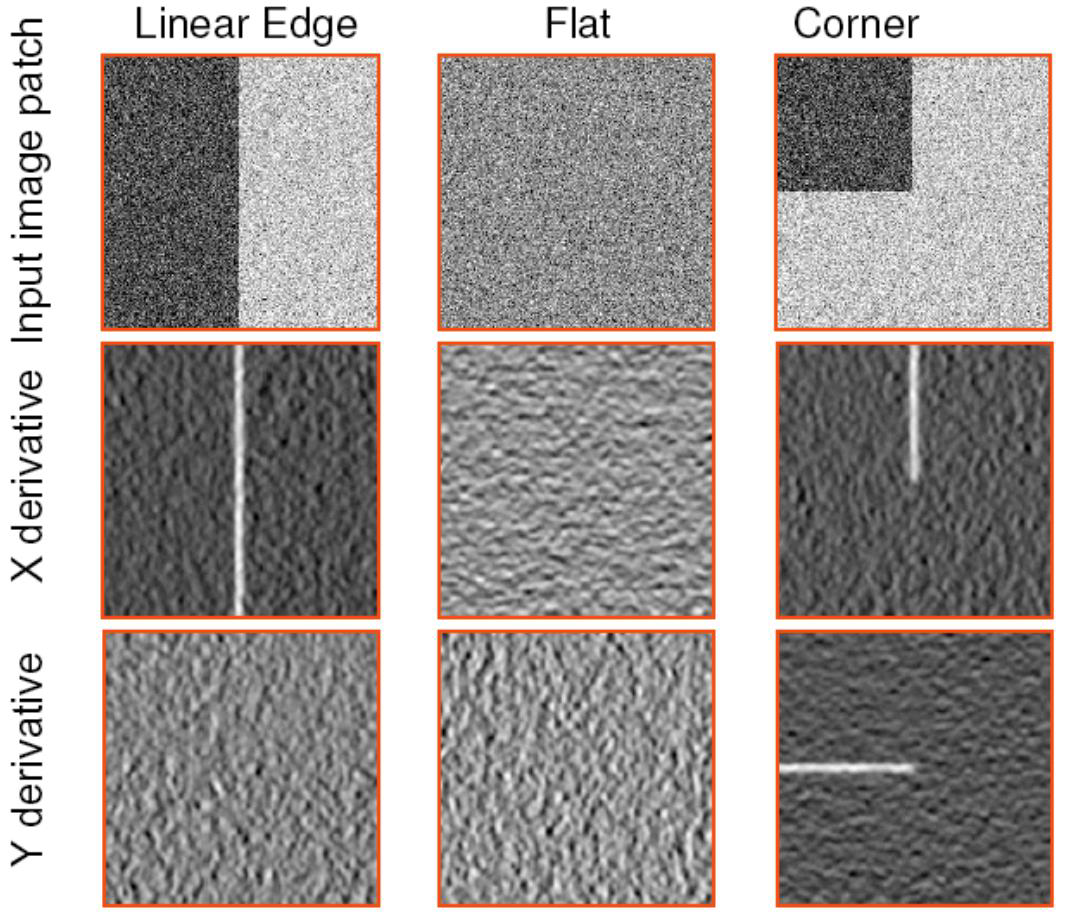
-
特征点分析:
-
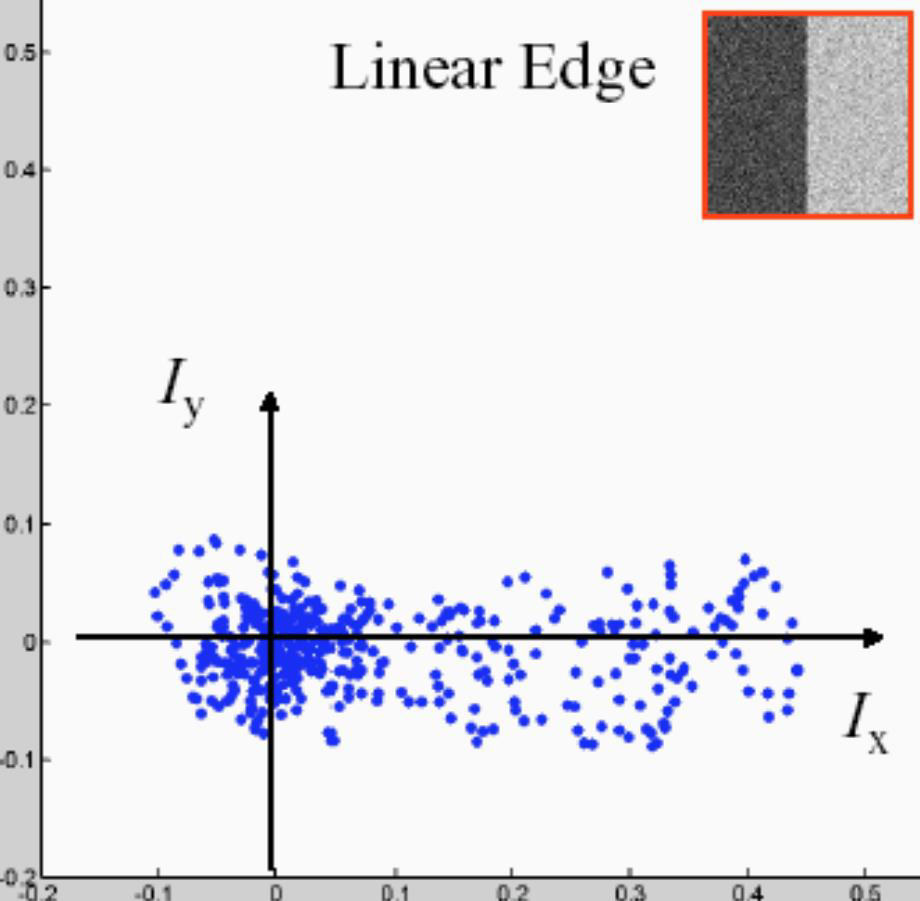
边缘(Edge):沿某一方向导数较大(如x 方向),另一方向接近零。
-
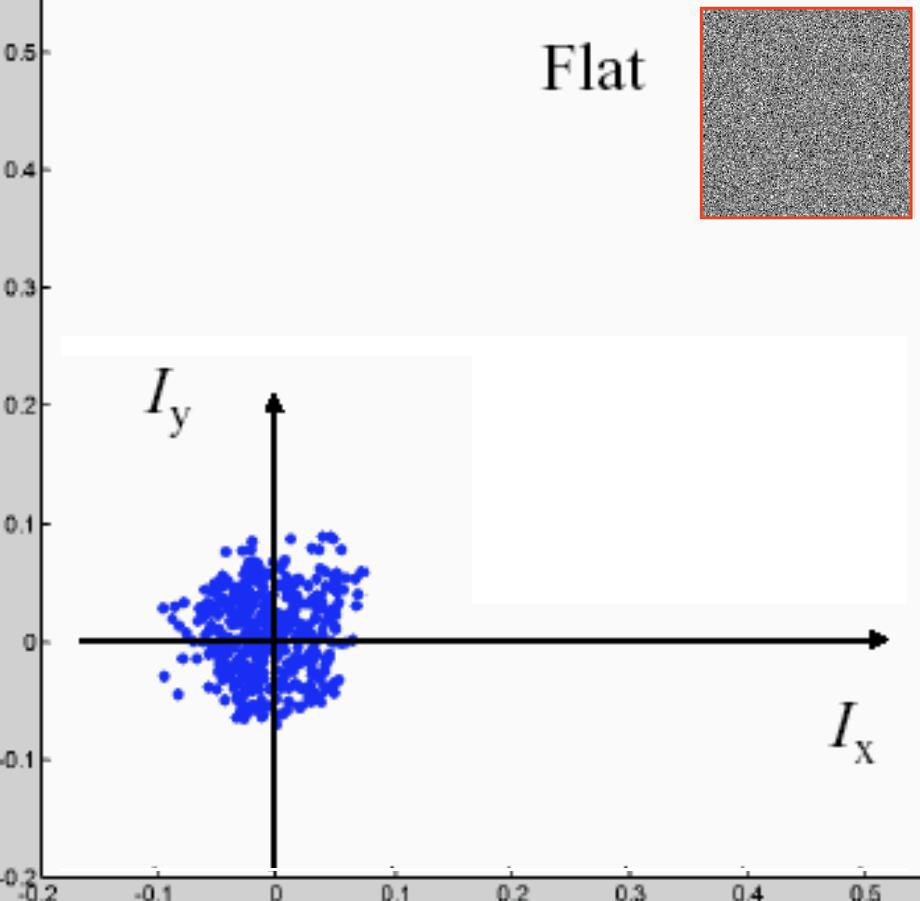
平滑区域(Flat):两个方向导数均接近零。
-
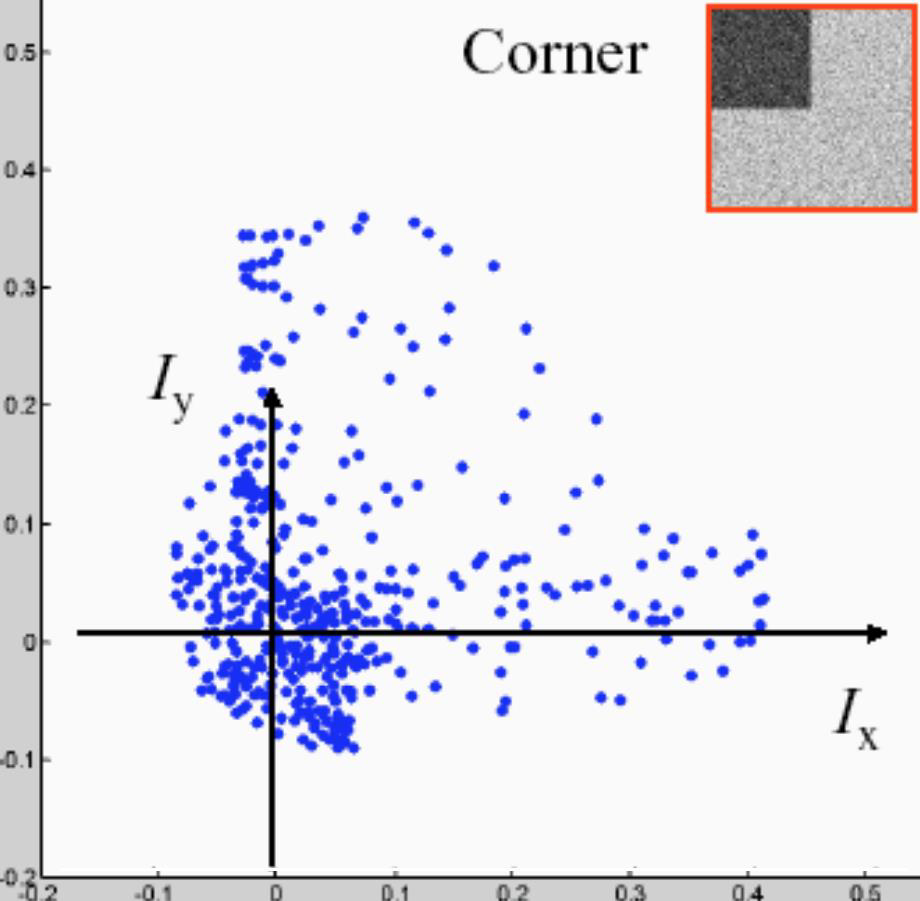
角点(Corner): xxx和 yyy方向导数均较大,对应特征点。
-
-
通过特征值检测
-
特征值条件:
-
角点:斜方差矩阵M的两个特征值λ1和λ2均较大。
-
边缘:仅一个特征值较大。
-
平滑区域:两个特征值均较小。
-
-
响应函数:通过设定阈值筛选特征点,如取较小特征值作为响应值。
-
响应函数R
| 方法 | 公式 | 特点 |
|---|---|---|
| 1994年原始方法 | R=min(λ1,λ2)R | 直接取较小特征值作为响应值。 |
| 1988年Harris方法 | R=det(M)−k⋅trace(M)2R | 通过行列式与迹的组合计算响应值,k为超参数( - 04- - 06)。 |
-
响应函数选择:不同函数需调整阈值,但核心均为分析M矩阵的特征值分布。
-
例题:Harris检测器应用
-
步骤:
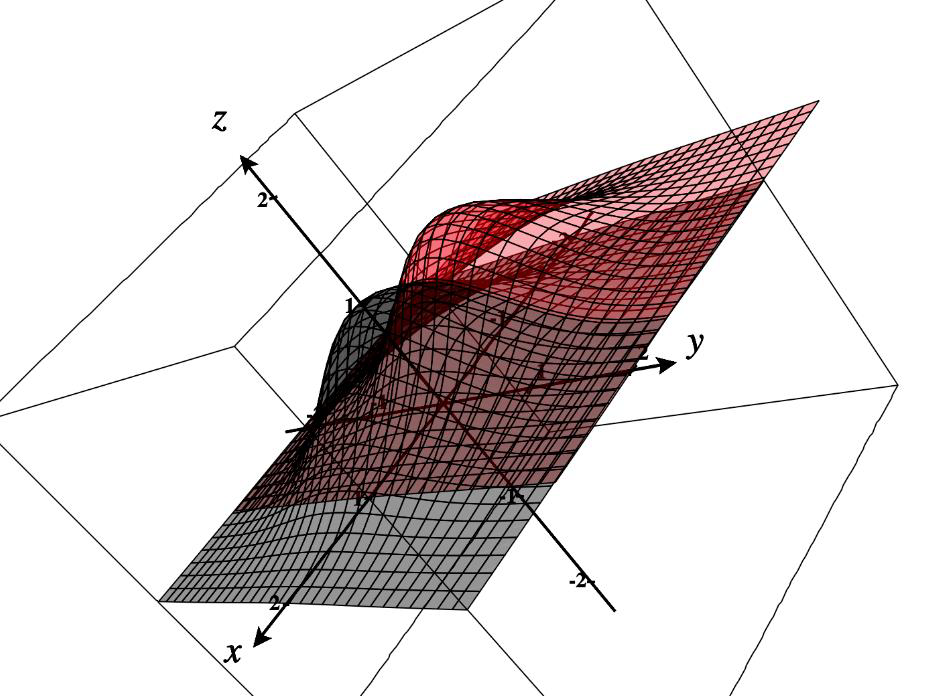
- 计算图像每个像素区域的斜方差矩阵M。
- 根据响应函数(如Harris方法)生成响应图,红色表示高响应区域。
- 设定阈值筛选候选角点。
-
问题:初始响应图存在密集冗余点,需进一步优化。
-
非最大值抑制
-
非极大值抑制(NMS):
- 选择局部响应最大值点作为候选角点。
- 抑制其邻域内其他低响应点。
- 迭代处理直至每个区域仅保留一个特征点。

-
应用场景:点云特征提取中同样需使用NMS避免密集冗余点。
二、harris 3d
Harris角点检测原理基于分析图像中小方块移动后像素强度的变化,该问题可转化为分析斜方差矩阵,矩阵元素为每个像素强度关于x和y方向的一阶导数。拓展至三维需解决三个问题:
- 离散点云中如何计算强度关于xyz方向的一阶导数
- 三维空间patch的定义(可通过半径r限定邻域)
- patch移动方式(类比二维情况,增加w维度)
- 核心难点在于三维点云中强度梯度的计算。
1) 例题:平面点移动分析
-
平面点移动特性:当平面沿x、y方向移动时,移动后的点与原平面距离为零;仅沿z方向移动会产生距离。
-
斜方差矩阵特征值分析:由三个方向移动距离组成的斜方差矩阵中,两个特征值为零,一个特征值较大,反映仅沿特定方向移动产生距离。
三.哈里斯总结
| 维度 | 协方差矩阵来源 | 响应函数 | 应用场景 |
|---|---|---|---|
| 二维图像 | 强度关于xy的一阶导 | λ₂ | 检测图像平面强度变化 |
| 3D带强度 | 强度关于xyz的一阶导 | λ₂ | 识别表面强度非均匀分布 |
| 3D无强度 | 表面法向量 | λ₃ | 检测几何非平面特征 |
| 6D混合 | 坐标+强度一阶导+法向量组合 | λ₄ | 综合强度与几何特征的关键点检测 |

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)