燃料电池系统simulink模型 质子交换膜燃料电池simulink模型 包含: 电堆模型、阴...
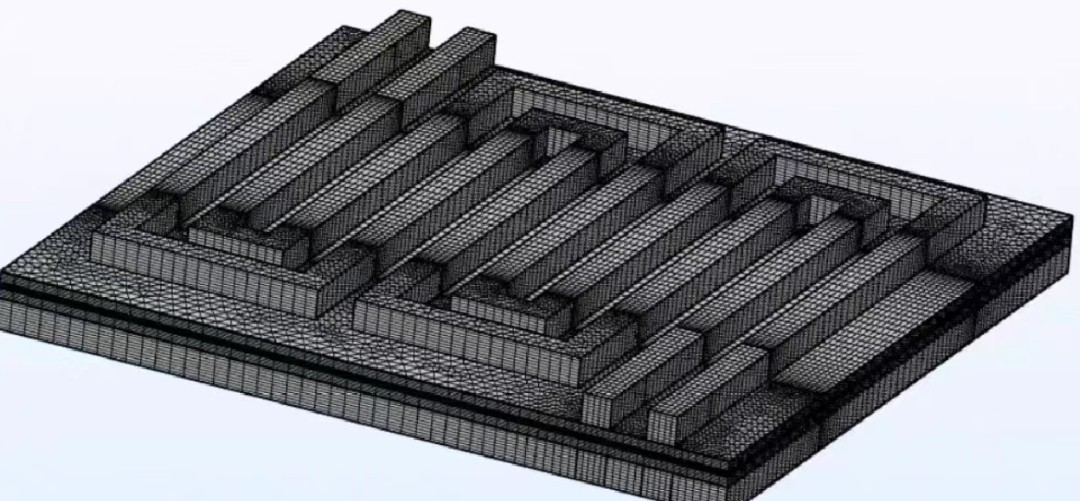
燃料电池系统simulink模型 质子交换膜燃料电池simulink模型 包含: 电堆模型、阴极流道、阳极流道 空气系统模型:空压机模型、进排气管道模型、加湿器模型、中冷器模型 氢气系统模型:氢气循环泵模型、引射器模型、喷氢阀模型、进排气管道模型、加湿器模型 有单氢循环泵、单引射器、循环泵和引射器的双模式切换策略 燃料电池汽车参数匹配与能量管理 包含燃料电池汽车的燃料电池动力源功率选型,驱动电机参数匹配选型,蓄电池参数匹配选型,主减速比匹配,以满足最高车速,最大爬坡度,百公里加速时间等动力性要求 然后根据参数匹配结果,搭建燃料电池汽车simulink仿真模型,包含驾驶员模型,整车模型,整车控制策略,工况识别模块等
燃料电池汽车仿真这玩意儿,玩起来是真的上头。最近在Simulink里折腾PEMFC系统模型,把电堆、气体流道、控制策略这些模块搭起来的时候,突然发现这玩意儿跟拼乐高似的——每个零件都得严丝合缝,参数稍微跑偏整车性能就翻车。
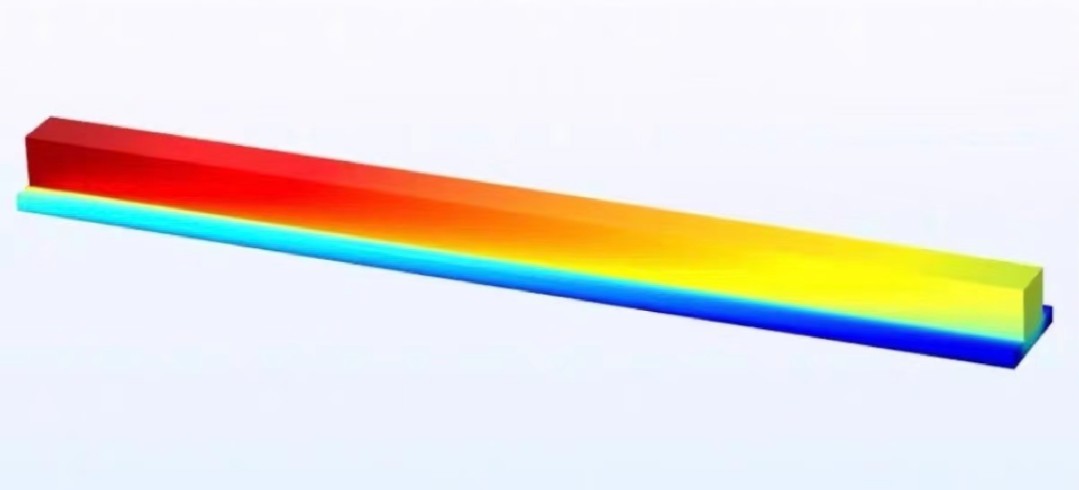
先说说电堆建模这个重头戏。搞过的人都知道,电堆电压模型就是个玄学现场。用Nernst方程打底没问题,但实际调试时总得加些补偿因子。我习惯在Simulink里直接用S函数搭电化学模型,像这种代码结构特别实用:
function [sys,x0,str,ts] = StackVoltage(t,x,u,flag,T,P)
% 温度补偿系数
k_temp = 0.0032;
switch flag
case 0
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 1;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sys = simsizes(sizes);
x0 = [298]; % 初始温度
case 3
I = u(1); % 负载电流
T_stack = x(1);
V_nernst = 0.85 - 0.23*log(I+1e-6) + k_temp*(T_stack-298);
sys = V_nernst - 0.05*I; % 欧姆压降补偿
end这代码里藏了个小trick:电流对数项加1e-6防止除零。调试时发现不加这个,低载工况直接数值爆炸,Simulink报错弹窗能弹到你怀疑人生。
气体系统这块,空压机模型绝对是戏精。特别是喘振线判断,用Stateflow做状态机比纯代码直观十倍。最近在模型里加了这种判断逻辑:
function surgeFlag = checkSurge(flowRate, pressureRatio)
persistent surgeMap;
if isempty(surgeMap)
surgeMap = [2.0 0.5; 2.5 0.7; 3.0 1.2]; % 喘振线数据
end
surgeLine = interp1(surgeMap(:,1), surgeMap(:,2), pressureRatio);
surgeFlag = (flowRate < surgeLine * 0.9); % 留10%安全余量这插值函数看起来简单,但实际调试时发现喘振线数据点的密度直接影响稳定性。有次偷懒只设了三个数据点,仿真时压力波动直接让空压机在喘振边缘反复横跳,整车功率跟蹦迪似的忽上忽下。
燃料电池系统simulink模型 质子交换膜燃料电池simulink模型 包含: 电堆模型、阴极流道、阳极流道 空气系统模型:空压机模型、进排气管道模型、加湿器模型、中冷器模型 氢气系统模型:氢气循环泵模型、引射器模型、喷氢阀模型、进排气管道模型、加湿器模型 有单氢循环泵、单引射器、循环泵和引射器的双模式切换策略 燃料电池汽车参数匹配与能量管理 包含燃料电池汽车的燃料电池动力源功率选型,驱动电机参数匹配选型,蓄电池参数匹配选型,主减速比匹配,以满足最高车速,最大爬坡度,百公里加速时间等动力性要求 然后根据参数匹配结果,搭建燃料电池汽车simulink仿真模型,包含驾驶员模型,整车模型,整车控制策略,工况识别模块等
说到氢气循环泵和引射器的双模式切换,这策略比想象中复杂。我们团队搞了个基于流量阈值的切换逻辑,在Stateflow里是这么玩的:
state ModeSwitch
en: Entry:
currentMode = 0; % 0:泵模式 1:引射模式
transitions:
when (H2_flow > 120) && (currentMode == 0)
currentMode = 1;
target(suctionMode);
when (H2_flow < 80) && (currentMode == 1)
currentMode = 0;
target(pumpMode);但实际装车测试发现,单纯流量阈值会导致模式高频切换。后来在条件判断里加了5秒的迟滞时间,才算稳住这个戏精系统。
参数匹配这块,主减速比选型绝对是门艺术。有次给某车型做匹配,用MATLAB写了个暴力搜索算法:
for i=1:length(ratioList)
accTime(i) = simAcceleration(ratioList(i));
gradeAbility(i) = simGrade(ratioList(i));
if accTime(i)<12 && gradeAbility(i)>30%
validRatios = [validRatios; ratioList(i)];
end
end结果输出十几个可行方案,最后选了个兼顾NVH和能耗的折中方案。这过程跟相亲似的——动力性指标是硬条件,但过日子还得考虑其他软实力。
整车控制策略里最骚的操作是工况识别模块。我们整了个基于K-means的驾驶模式聚类,代码里用到了实时车速和加速踏板变化率:
function driveMode = detectPattern(v, pedal)
persistent centroid;
if isempty(centroid)
centroid = [30 0.3; 60 0.15; 80 0.1]; % 预设聚类中心
end
distance = sum(([v pedal] - centroid).^2, 2);
[~, driveMode] = min(distance);有次路试工程师反馈高速工况总跳不到运动模式,查了半天发现预设的聚类中心车速阈值设得太高。把80km/h的 centroid 调到70km/h,立马药到病除。
仿真模型搭完那天,看着工况循环里燃料电池效率曲线平稳爬升,各个子系统像交响乐团似的默契配合,这种成就感比通关黑魂还带劲。不过千万别以为这就完了——真实装车时,某个电磁阀的响应延迟就能让你三天三夜睡不着觉。仿真和现实的差距,大概就像自拍和身份证照片的区别吧。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献45条内容
已为社区贡献45条内容

所有评论(0)