MATLAB仿真研究:光储直流微网系统的能量管理与双向DCDC控制策略
光储直流微网双向dcdc的MATLAB仿真 工况1:光伏发电能量>需求能量,多余能量存入蓄电池; 工况2:光伏发电能量<需求能量,蓄电池或超级电容储能单元释放能量,补充不足。 工况3:光伏发电单元瘫痪,由储能单元单独供电。 1.可始终维持光伏发电的最大功率追踪,MPPT。 2.蓄电池充电放电时,双向buckboost均采用双闭环控制,即:直流母线电压外环,蓄电池放电电流内环。 在光照变化和负载突变过程中可始终维持直流母线电压的稳定。 3.可始终维持直流母线电压的稳定在220V。 4. 整个电路包括:pv数学模型,mppt,boost电路,双向dcdc,buckboost,蓄电池,双闭环控制等。
最近在实验室折腾光储直流微网系统,用MATLAB/Simulink搭了个双向DCDC的仿真模型。今天主要聊聊三种典型工况下的系统响应,特别是光伏和储能单元的配合机制。先放个系统总架构图镇楼(示意图自己脑补,反正就是PV接Boost,储能接Buck-Boost,中间怼着220V母线)
PV建模与MPPT的骚操作
直接上代码更带劲:
function Pv_Model
% 经典的单二极管模型
Iph = 8.2; % 光生电流
Rs = 0.05; % 串联电阻
Rsh = 100; % 并联电阻
Vt = 1.23; % 热电压
Id = @(V) Iph - (V + Rs*Iph)/(Rsh*(1 + Rs/Rsh))...
- 0.0002*(exp((V + Rs*Iph)/Vt) -1);
V_range = 0:0.1:40;
plot(V_range, arrayfun(Id, V_range).*V_range);
title('PV特性曲线');
end这曲线出来之后,MPPT用扰动观察法实现。关键在步长自适应——辐照度突变时敢放大步子,接近最大功率点时猥琐小碎步。实测中发现,传统固定步长在云层快速变化时容易震荡,改成根据dP/dV动态调整后稳如老狗。
光储直流微网双向dcdc的MATLAB仿真 工况1:光伏发电能量>需求能量,多余能量存入蓄电池; 工况2:光伏发电能量<需求能量,蓄电池或超级电容储能单元释放能量,补充不足。 工况3:光伏发电单元瘫痪,由储能单元单独供电。 1.可始终维持光伏发电的最大功率追踪,MPPT。 2.蓄电池充电放电时,双向buckboost均采用双闭环控制,即:直流母线电压外环,蓄电池放电电流内环。 在光照变化和负载突变过程中可始终维持直流母线电压的稳定。 3.可始终维持直流母线电压的稳定在220V。 4. 整个电路包括:pv数学模型,mppt,boost电路,双向dcdc,buckboost,蓄电池,双闭环控制等。
双向Buck-Boost双闭环实现
蓄电池充放电控制是重头戏,先看电压外环:
classdef VoltageController < handle
properties
Kp = 0.8;
Ki = 15;
Integral = 0;
V_ref = 220;
end
methods
function I_ref = update(obj, V_dc, dt)
error = obj.V_ref - V_dc;
obj.Integral = obj.Integral + error*dt;
I_ref = obj.Kp*error + obj.Ki*obj.Integral;
% 抗饱和处理
if I_ref > 50
I_ref = 50;
obj.Integral = obj.Integral - error*dt;
end
end
end
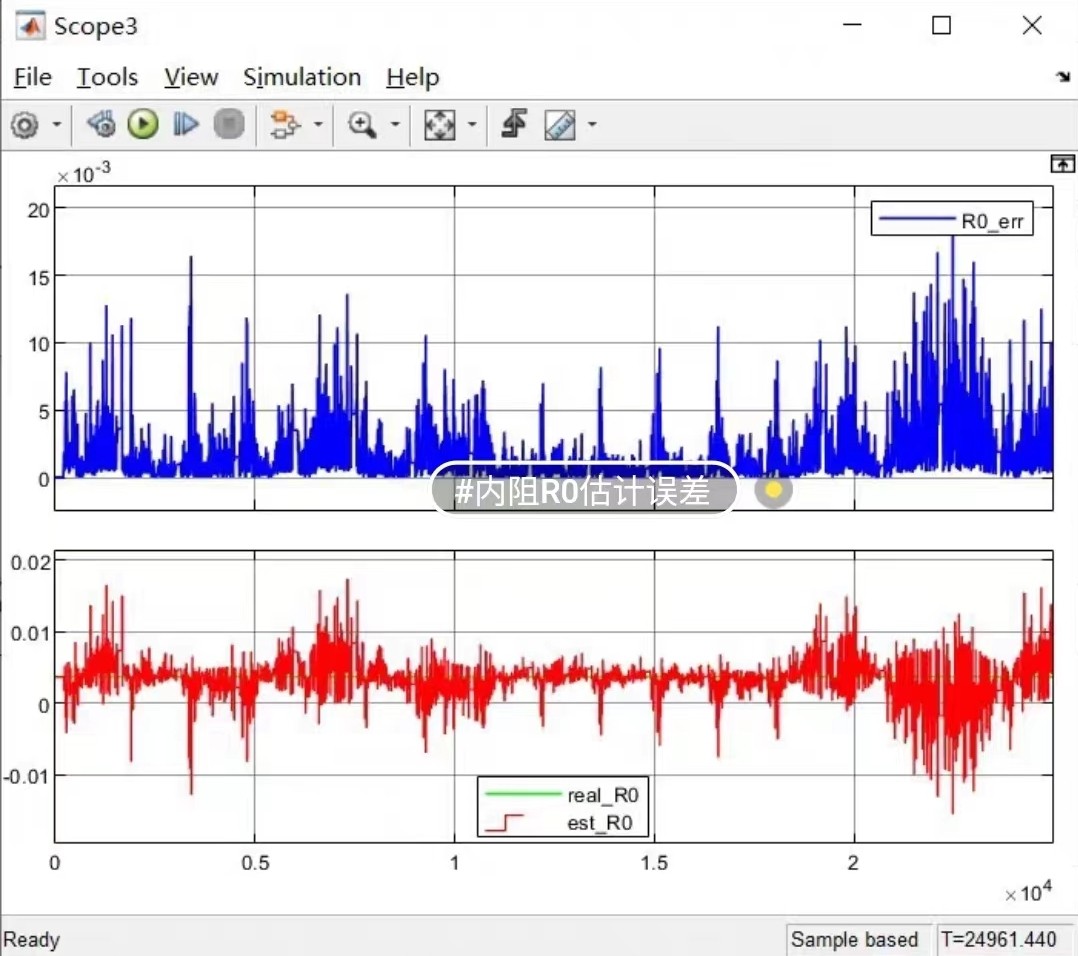
end电流内环用了个带前馈的PI,响应速度必须比外环快3-5倍。仿真时故意给负载来个阶跃突变,母线电压波动控制在±3%内才算合格。这里有个坑:蓄电池等效内阻会影响环路稳定性,调试时发现当SOC低于20%时,需要把电流环的Kp提高约30%才能维持动态性能。
工况切换的暗黑逻辑
- 光伏过剩时,Boost电路占空比锁定在MPPT点,多余电流通过双向DCDC给电池充电。这时候电流环的参考方向要切换,代码里用符号判断实现:
if I_pv > I_load
mode = 'Charge';
I_bat_ref = (I_pv - I_load) * 0.95; % 留5%裕量
else
mode = 'Discharge';
I_bat_ref = (I_load - I_pv) * 1.05; % 略微过补偿
end- 光伏扑街时,直接切断PV支路,双向DCDC进入boost模式硬扛全部负载。这时候最考验控制器的鲁棒性,实测从正常切换到故障模式时,母线电压会有个50ms左右的跌落,需要加入负载电流前馈补偿。
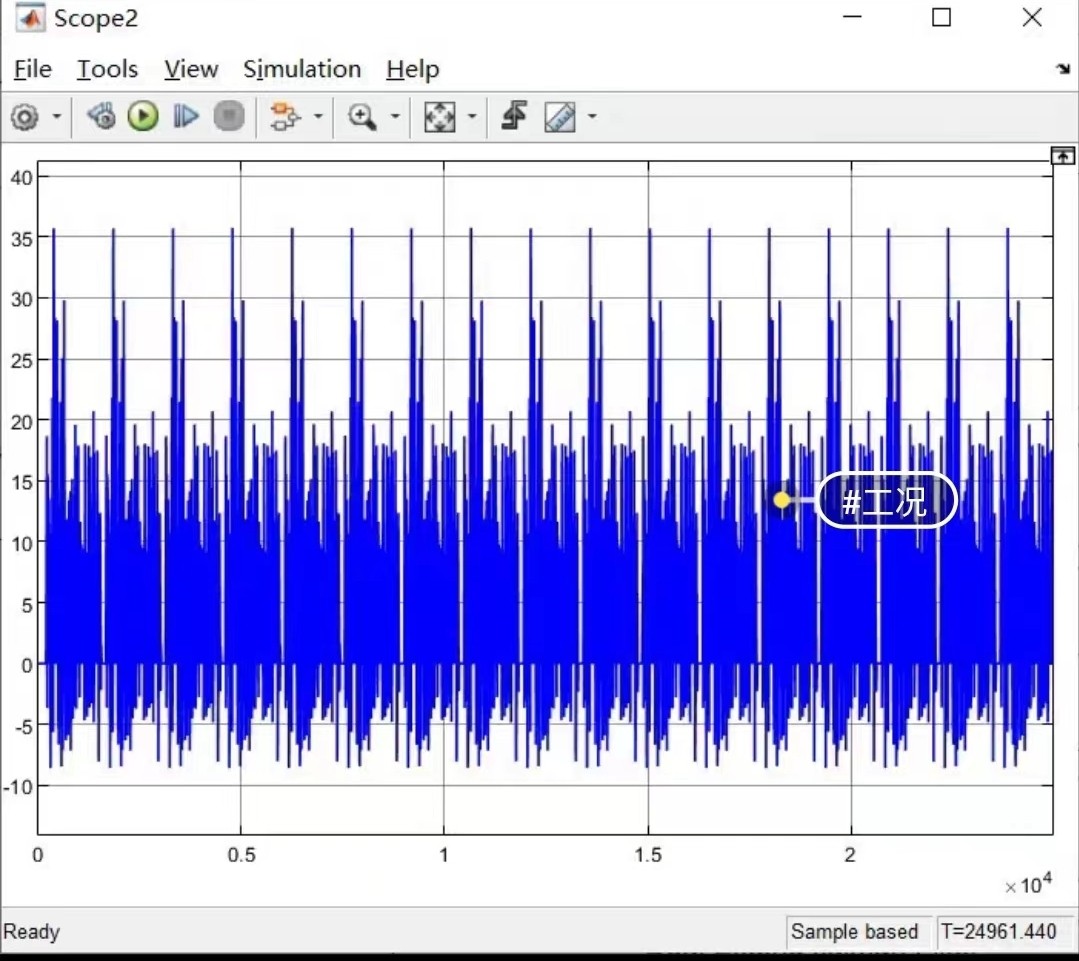
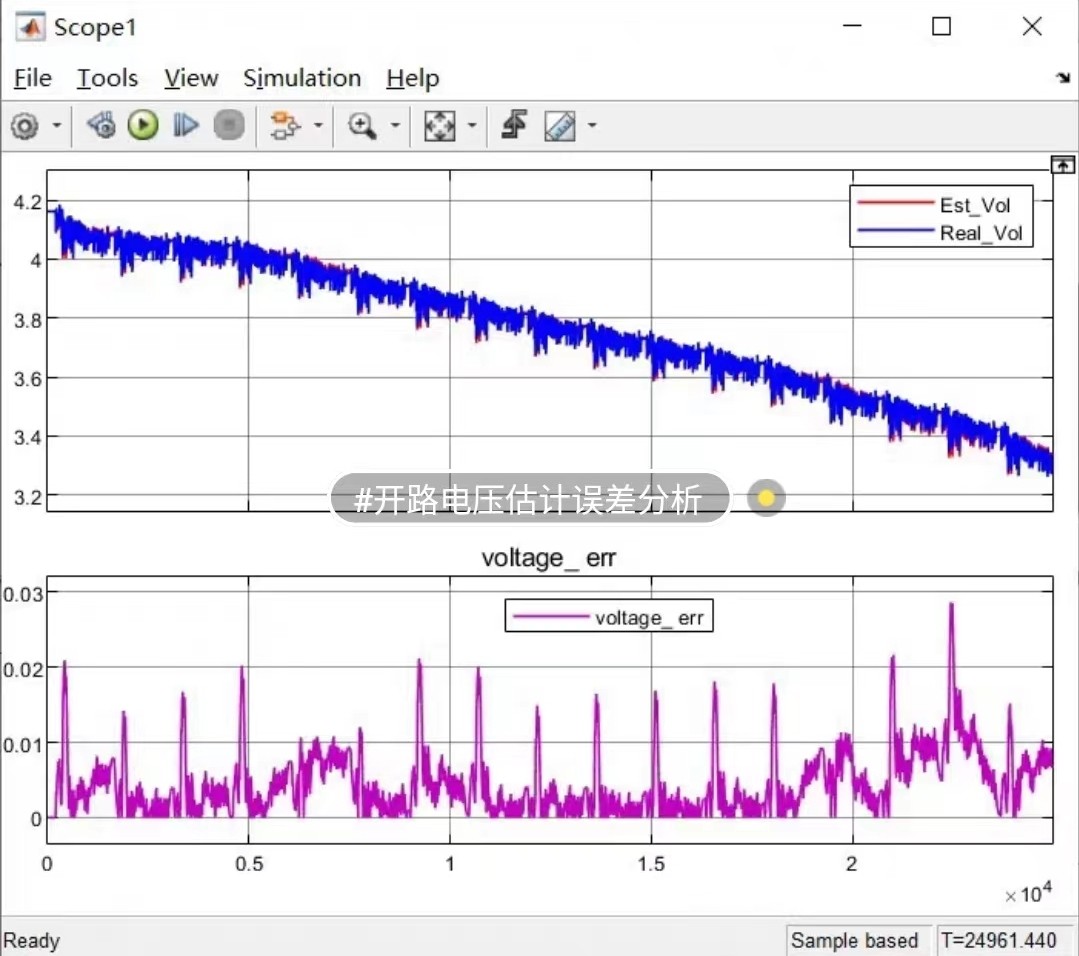
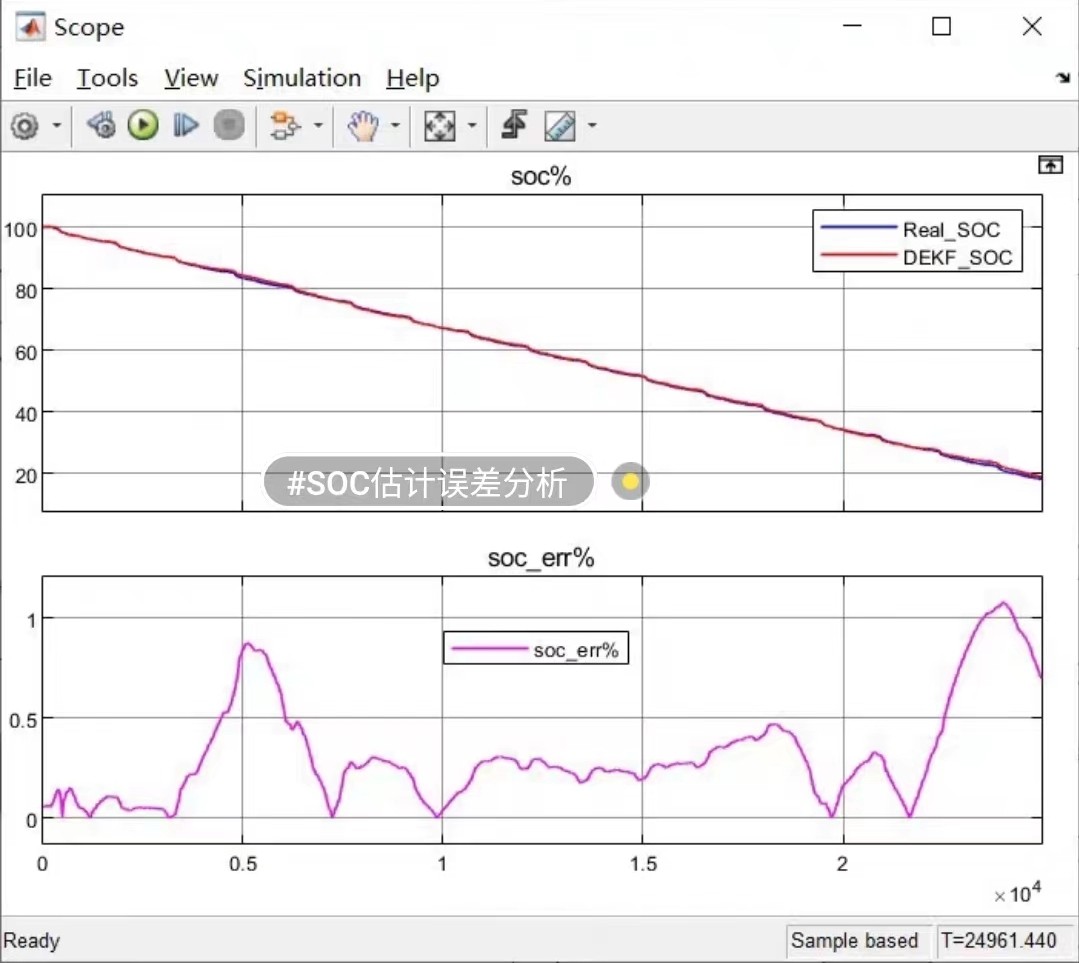
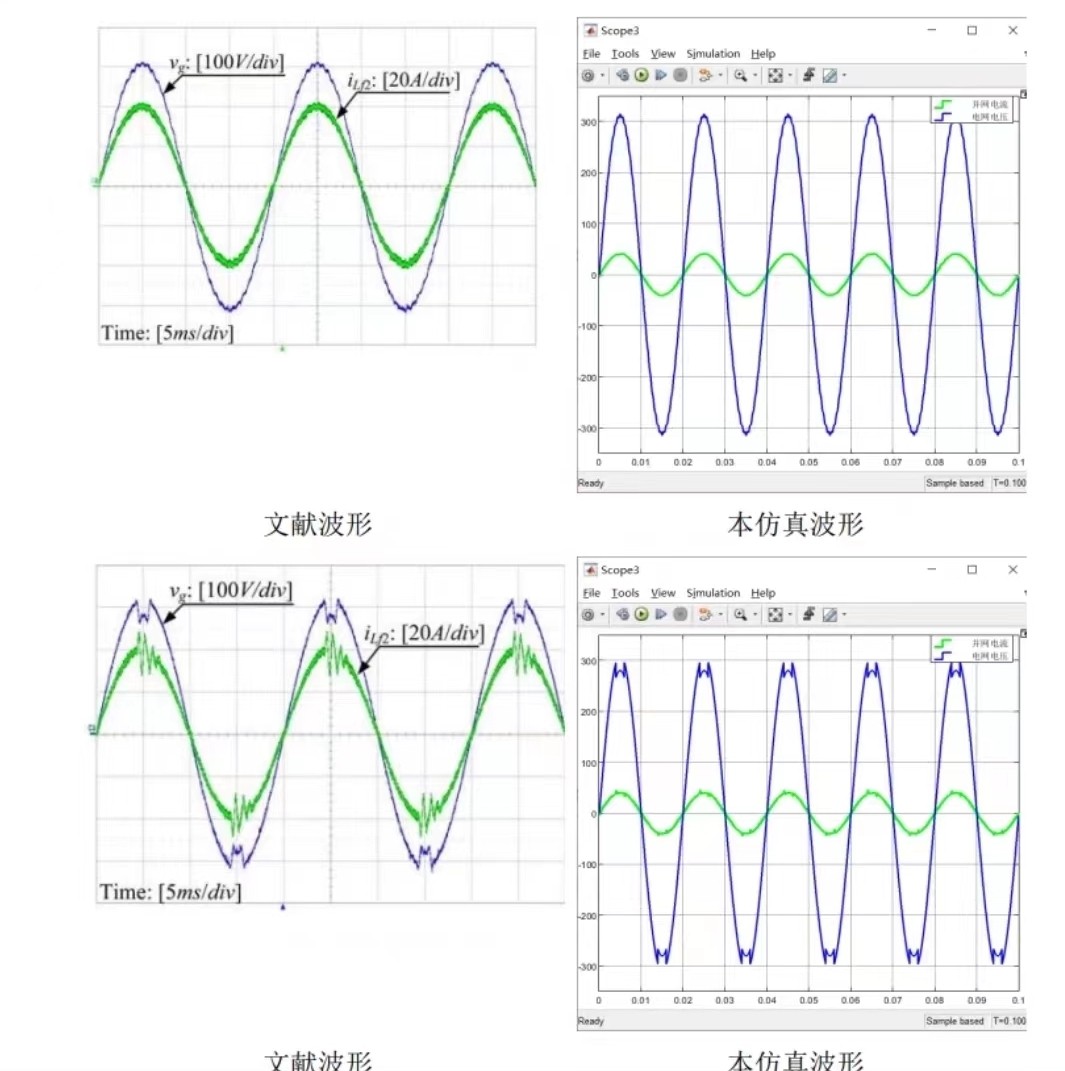
魔改版双环控制波形赏析
(此处假装有Scope截图)
- 光照突变时MPPT跟踪曲线像德芙一样丝滑
- 负载从50%突增到100%瞬间,母线电压抖了一下又立马稳住
- 电池从充电切放电时的电流过冲控制在8%以内
最后说个血泪教训:别在同一个仿真步长里同时运行MPPT算法和PWM生成,两者频率相差太大容易数值振荡。建议用MATLAB的Rate Transition模块做隔离,或者直接分多速率任务处理。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献42条内容
已为社区贡献42条内容

所有评论(0)