自动驾驶车辆横向轨迹跟踪:基于NN与ANFIS优化MPC的探索
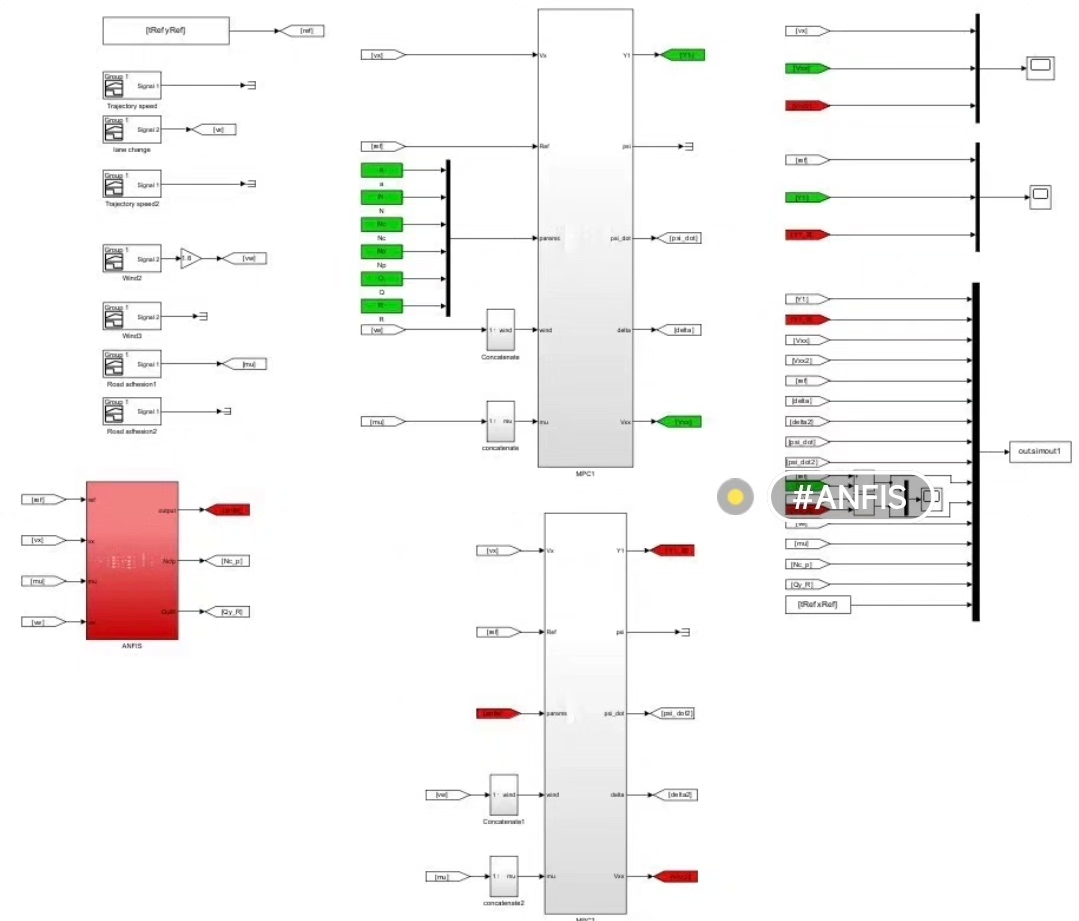
轨迹跟踪算法-基于神经网络NN或自适应神经模糊系统ANFIS优化模型预测控制MPC 的自动驾驶车辆横向轨迹跟踪 包含: 1.参考文献; 2.基于神经网络NN的自适应参数(Np、Nc、Q、R 等)的离散 MPC对比模型和代码; 3.基于自适应神经模糊系统ANFIS的自适应参数(Np、Nc、Q、R 等)的离散 MPC对比模型和代码; 三自由度车辆动力学
一、前言
在自动驾驶领域,车辆横向轨迹跟踪是确保行驶安全与精准性的关键任务。模型预测控制(MPC)因其能处理多约束、多目标优化问题而被广泛应用。而结合神经网络(NN)或自适应神经模糊系统(ANFIS)对MPC进行优化,能进一步提升其性能。本文将深入探讨基于这两种优化方式的离散MPC在自动驾驶车辆横向轨迹跟踪中的应用,并给出相关模型与代码示例。
二、三自由度车辆动力学基础
在研究轨迹跟踪算法前,先简单了解下三自由度车辆动力学模型。此模型考虑车辆的侧向运动、横摆运动和纵向运动。在横向轨迹跟踪中,侧向运动和横摆运动是重点关注对象。侧向力与横摆力矩的平衡决定了车辆的横向运动状态。
三、基于神经网络NN的离散MPC对比模型
1. 自适应参数介绍
- Np(预测时域):决定了MPC预测未来状态的步数,较长的Np能考虑更远的未来状态,但计算量会增加。
- Nc(控制时域):表示控制输入的作用步数,一般Nc <= Np。
- Q(状态权重矩阵):用于权衡不同状态变量的重要性,例如对车辆横向位置偏差赋予较大权重,可使MPC更关注该状态的调整。
- R(控制输入权重矩阵):调节控制输入的变化幅度,防止控制量过大导致车辆不稳定。
2. 模型构建
假设离散状态空间模型为:$x{k + 1} = Adxk + Bduk$,其中$xk$是离散时间$k$的状态向量,$uk$是控制输入向量,$Ad$和$B_d$是离散化后的系统矩阵。
MPC的目标函数可写为:
\[J = \sum{i = 1}^{Np} (x{k + i|k}^TQx{k + i|k} + u{k + i - 1|k}^TRu_{k + i - 1|k})\]
轨迹跟踪算法-基于神经网络NN或自适应神经模糊系统ANFIS优化模型预测控制MPC 的自动驾驶车辆横向轨迹跟踪 包含: 1.参考文献; 2.基于神经网络NN的自适应参数(Np、Nc、Q、R 等)的离散 MPC对比模型和代码; 3.基于自适应神经模糊系统ANFIS的自适应参数(Np、Nc、Q、R 等)的离散 MPC对比模型和代码; 三自由度车辆动力学
这里,$x{k + i|k}$是基于时刻$k$预测的时刻$k + i$的状态,$u{k + i - 1|k}$是基于时刻$k$预测的时刻$k + i - 1$的控制输入。
3. 代码示例(Python + CasADi)
import casadi as ca
# 定义参数
Np = 10
Nc = 5
nx = 4 # 假设状态维度
nu = 2 # 假设控制输入维度
Q = ca.diagcat([10, 1, 1, 1]) # 状态权重矩阵
R = ca.diagcat([1, 1]) # 控制输入权重矩阵
# 定义符号变量
x = ca.MX.sym('x', nx)
u = ca.MX.sym('u', nu)
# 离散化系统矩阵(假设已离散化)
A_d = ca.MX.sym('A_d', nx, nx)
B_d = ca.MX.sym('B_d', nx, nu)
# 预测状态
X = ca.MX.sym('X', nx, Np + 1)
U = ca.MX.sym('U', nu, Nc)
J = 0
for i in range(Np):
if i < Nc:
J = J + (X[:, i].T @ Q @ X[:, i]) + (U[:, i].T @ R @ U[:, i])
else:
J = J + (X[:, i].T @ Q @ X[:, i])
# 状态更新
if i < Np:
X_next = A_d @ X[:, i] + B_d @ (U[:, i] if i < Nc else ca.MX.zeros(nu, 1))
g = X_next - X[:, i + 1]
ca.substitute(X, i + 1, X_next)
# 构建优化问题
OPT_variables = ca.vertcat(ca.reshape(X, -1, 1), ca.reshape(U, -1, 1))
nlp_prob = {'f': J, 'x': OPT_variables, 'g': ca.reshape(g, -1, 1)}
solver = ca.nlpsol('solver', 'ipopt', nlp_prob)
# 初始条件和参数设置
x0 = ca.DM.zeros(nx)
u0 = ca.DM.zeros(nu)
args = {'x0': ca.vertcat(ca.reshape(ca.repmat(x0, 1, Np + 1), -1, 1), ca.reshape(ca.repmat(u0, 1, Nc), -1, 1)),
'lbg': ca.DM.zeros((nx * Np, 1)), 'ubg': ca.DM.zeros((nx * Np, 1))}
# 求解
sol = solver(**args)代码分析
- 首先定义了预测时域Np、控制时域Nc、状态维度nx和控制输入维度nu,以及状态权重矩阵Q和控制输入权重矩阵R。
- 然后通过CasADi库定义了符号变量,包括状态x、控制输入u、离散化系统矩阵Ad和Bd,以及预测状态X和控制输入U。
- 在构建目标函数J时,通过循环对预测时域内的状态和控制输入进行加权求和。
- 状态更新部分通过系统离散模型实现,将预测状态与实际状态的偏差作为约束条件。
- 最后构建优化问题并使用IPOPT求解器进行求解。
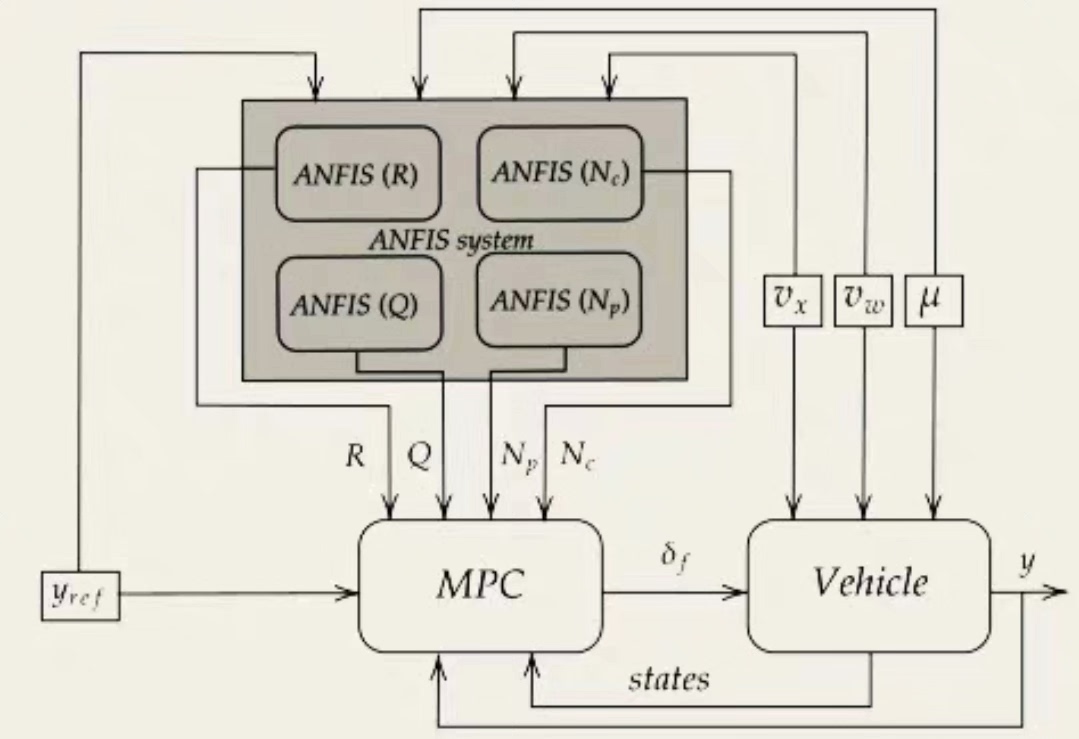
四、基于自适应神经模糊系统ANFIS的离散MPC对比模型
1. 自适应参数及ANFIS原理
与NN类似,ANFIS也用于自适应调整Np、Nc、Q、R等参数。ANFIS结合了神经网络的学习能力和模糊逻辑系统的语言表达能力。它通过输入输出数据对进行学习,自动生成模糊规则和隶属度函数,以适应不同的工况。
2. 模型构建
基于ANFIS的离散MPC,首先要训练ANFIS模型以得到合适的参数。假设输入为车辆当前状态和轨迹偏差等信息,输出为优化后的Np、Nc、Q、R。训练完成后,将这些参数代入离散MPC模型中,与上述NN优化的MPC类似,构建目标函数和状态更新方程。
3. 代码示例(Python + Skfuzzy)
import numpy as np
import skfuzzy as fuzz
from skfuzzy import control as ctrl
# 定义输入变量
input_state = ctrl.Antecedent(np.arange(-10, 10, 0.1),'state')
input_error = ctrl.Antecedent(np.arange(-5, 5, 0.1), 'error')
# 定义输出变量
output_Np = ctrl.Consequent(np.arange(5, 20, 1), 'Np')
output_Nc = ctrl.Consequent(np.arange(1, 10, 1), 'Nc')
output_Q1 = ctrl.Consequent(np.arange(1, 20, 1), 'Q1')
output_R1 = ctrl.Consequent(np.arange(0.1, 5, 0.1), 'R1')
# 定义隶属度函数
input_state['low'] = fuzz.trimf(input_state.universe, [-10, -5, 0])
input_state['medium'] = fuzz.trimf(input_state.universe, [-5, 0, 5])
input_state['high'] = fuzz.trimf(input_state.universe, [0, 5, 10])
input_error['negative'] = fuzz.trimf(input_error.universe, [-5, -2.5, 0])
input_error['zero'] = fuzz.trimf(input_error.universe, [-2.5, 0, 2.5])
input_error['positive'] = fuzz.trimf(input_error.universe, [0, 2.5, 5])
output_Np['small'] = fuzz.trimf(output_Np.universe, [5, 10, 15])
output_Np['medium'] = fuzz.trimf(output_Np.universe, [10, 15, 20])
output_Np['large'] = fuzz.trimf(output_Np.universe, [15, 20, 25])
# 省略其他输出变量隶属度函数定义
# 定义模糊规则
rule1 = ctrl.Rule(input_state['low'] & input_error['negative'], output_Np['small'])
# 省略其他规则定义
# 创建控制系统
system = ctrl.ControlSystem([rule1])
simulator = ctrl.ControlSystemSimulation(system)
# 训练数据(假设已有训练数据)
training_states = np.random.uniform(-10, 10, 100)
training_errors = np.random.uniform(-5, 5, 100)
for state, error in zip(training_states, training_errors):
simulator.input['state'] = state
simulator.input['error'] = error
simulator.compute()
optimized_Np = simulator.output['Np']
# 类似获取其他优化参数
# 将优化参数代入离散MPC(此处省略离散MPC部分代码,与上述NN优化类似)代码分析
- 首先使用Skfuzzy库定义了输入变量(如车辆状态inputstate和轨迹偏差inputerror)和输出变量(如优化后的Np、Nc等)。
- 为输入输出变量定义了隶属度函数,例如对于输入状态定义了“low”“medium”“high”三种隶属度函数。
- 通过定义模糊规则,如rule1,将输入变量与输出变量联系起来。
- 创建控制系统并使用假设的训练数据进行训练,获取优化后的参数,后续可将这些参数代入离散MPC模型中。
五、参考文献
[1] Rajamani, R. (2012). Vehicle Dynamics and Control. Springer.
[2] Wang, L. X. (1994). Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice Hall.
[3] Haykin, S. (2009). Neural Networks and Learning Machines. Pearson Prentice Hall.
六、总结
本文介绍了基于神经网络NN和自适应神经模糊系统ANFIS优化离散MPC的自动驾驶车辆横向轨迹跟踪模型,并给出了相关代码示例。NN和ANFIS都为MPC参数的自适应调整提供了有效途径,实际应用中可根据具体需求和系统特点选择合适的优化方式,以提升自动驾驶车辆横向轨迹跟踪的性能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)