一句话讲透SOTIF?
最近,听到一个说法:SOTIF就是解决性能不足、功能局限、人为误用的问题。
刚听说的时候,觉得挺有道理。但仔细想想,如果真的把这句话当成SOTIF的全部,就很容易把问题想简单了。因为这里面涵盖着三大类风险,而每一类都藏着一堆让人头疼的工程细节。
1. 性能不足:算法也有“软肋”
什么是性能不足?说白了就是算法在它应该能处理的情况下,却没有处理好。
组成员在做规控时遇到过一个问题,他们的MPC轨迹规划器在仿真里跑得特别漂亮,各种场景都过了,但有一次在封闭场地做测试时,遇到一个特定曲率的弯道,对面又来了一辆车,然后规划器就突然懵住了,输出了一条很不合理的轨迹。他分析后发现,问题出在几个参数的组合上:预测时域长度、成本函数里的权重、对对面车辆意图的估计等等,这些单独看都没有问题,但凑到一起就出事了。工程师感慨说:算法的软肋不是设计出来的,是碰出来的。
但是,做汽车研发单纯靠碰那是不可能的,如果想提高效率,就需要即便不知道什么时候会踩到某个坑,但是你得知道这个坑将来会出现在哪里。这也就是SOTIF里常说的“识别触发条件”,需要能够找出那些能让正常系统“不正常”的环境条件组合。
2. 功能局限:用户根本不管你的ODD
功能局限这件事,说起来其实挺扎心的。在设计系统的时候,设计师划了一个圈叫ODD(运行设计域)。但是用户其实根本不管这个圈。之前同事做过一个L2+ 系统,明确写了“仅适用于高速公路”。结果,很多用户在乡间小路上还继续开着。
这种用户手册写清楚了,系统也提示了,但是用户在受到广告和体验过一段时间后,会误以为“这车挺智能的,复杂问题能处理”。但用户不知道的是,功能局限的发生有两类触发条件,一种是典型触发条件,指那些我们都能想到的,比如目标物被遮挡等场景;第二种是特殊的触发条件,指那些我们想不到的或者不太容易量化评估的,例如特殊的降雨强度下,传感器的感知效果会大幅下降等情况。典型的触发条件是能够测量的,而特殊类型的最不好整,因为你不知道它存不存在,假使存在,又存在于哪里,一直惴惴不安,直到某天真的出了问题。
3. 人为误用:用户不是故意的
这类风险可能是最让人无奈的一类。
看“误用”的字面意思,你可能会理解为是用户操作不当。但了解后才明白,很多时候并不是用户操作不当,而是用户的“心理模型”和系统的“设计模型”对不上。
2026年1月发表于《SAE International Journal》的一项研究中提出了针对“合理可预见的误用”的结构化评估框架。该研究以自动紧急制动(AEB)系统为例,分析了驾驶员在高速状态下过度依赖AEB的场景。因为正常情况下,AEB不该在高速行驶的时候产生急刹,因为后面可能会有车,急刹车容易造成追尾事故。但有些驾驶员在高速上遇到前车减速的情况时,却会想着依赖AEB,觉得系统会帮自己去刹车,但结果是系统根本没打算介入,最后就造成了事故的发生。
该研究团队用了一个很有意思的方法来分析这个问题,他们先是做了STPA分析,这是一种系统性的安全分析方法,不是列清单那种,而是从“控制行为”的角度去找漏洞。之后他们用仿真测试去量化风险,最后用驾驶员在环测试系统做实验验证。最终,研究团队认为,合理可预见的误用是可以在设计阶段被建模、仿真和验证的。换句话说,人为误用可以通过在设计阶段考虑上用户的行为逻辑而减少发生。
SOTIF到底是做什么的?
SOTIF分析框架是建立在场景分类的基础上,业内称之为“四区模型”(见下图),SOTIF的工程目标就是要扩大区域1,压缩区域2和区域3,直到残余风险可接受。
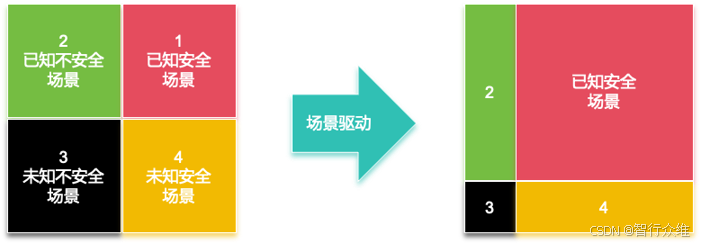
其中区域3是最麻烦的,因为你不知道危险在哪儿,所以根本没有办法去一个一个地测出来。于是,工程师们想到一个办法是用统计学来“兜底”。简单说,就是在一个很大的范围内进行随机测试(主要是仿真),如果跑N个场景都没出事,那在95%的置信度下,真正会出事的概率也不会超过3/N。这就是行业里常说的“三分法则”。理论上来讲,如果要证明风险足够低,那就得跑足够多的测试。这也是为什么SOTIF验证需要用到海量仿真的根本原因,因为物理路测无法高效满足那么多的里程要求。
有哪些方案可以用来验证SOTIF?
1. 高级整车在环系统(VaHIL)
有次在实验室里看到一套设备:一辆真车停在测试台架上,面前的环形屏幕里跑着仿真场景,一会下暴雨,一会突然窜出个行人,一会又有隧道口光线突变的场景出现等。这些仿真场景恰恰就是SOTIF需要测试的那些触发条件,而这些特定的光照角度、特定的雨量、特定的目标物等在真实道路上很难按需出现以及复现,但在这个测试台架上就可以精确控制,想跑多少次就跑多少次。后来我们把几个之前路上很难复现的corner case放到VaHIL上跑,很短的时间就出测试结果了。测试工程师说:“如果早点用上这个,之前加班熬夜追BUG的日子能少上一半。”

2. “水母”云仿真平台
SOTIF验证需要的测试量是惊人的,我们不可能在路上跑那么久,所以大部分的测试基本会在云端完成。“水母”云仿真平台内置了很多场景库,包括C-NCAP、E-NCAP等法规场景、交通事故场景、自然驾驶场景、针对SOTIF设计的触发条件场景等等。这个平台可以实现多节点并发测试,每天能跑上百万公里以及千万公里,能够高效积累有效测试里程。

3. “水木灵境”场景工场
场景多了也会有问题,因为需要分辨出哪些场景是有价值的,哪些是冗余的。“水木灵境”场景工场可以将各种来源的数据加工成可用的测试场景,通过多源场景数据体系的建设以及对车路云一体化场景数据的构建,可以更有效地进行SOTIF有效性的验证。SOTIF的难点不在已知的危险域,而在未知的危险域。场景工场可以帮工程师在“未知”里找线索。

一些暂时没想清楚的问题
目前,SOTIF的基本框架是大概了解了,但还有些问题依然存在疑问:
1. 怎么判断“足够安全”?
就这个问题,统计学方法给了一个数据,例如风险低于10的-8次方。但,这个数字是怎么定的呢?定高了,成本扛不住,定低了,安全又没有保障。那行业里有没有一个公认的标准呢?查了很多资料,发现不同的厂商、不同场景的标准都不一样。
2. AI算法怎么SOTIF?
传统的SOTIF方法(例如STPA)是针对规则系统的,但现在自动驾驶越来越依赖AI,模型的输出是不确定的,那怎么对不确定的系统做SOTIF分析呢?看到有些研究在尝试用对抗生成的方法去探测模型的边界,但感觉离工程化还有些距离。
3. 人为误用怎么建模?
人的行为太复杂了,上述提到过的那篇有关AEB的研究给了我些启发,但研究中用到的方法需要做大量的人因实验,成本不低。那有没有更高效的建模方法,还是说,SOTIF里的“人为误用”只能是一个案例一个案例地去分析?
等等。
最后
回到开篇的那句话:SOTIF就是解决性能不足、功能局限、人为误用的问题,这句话到底有没有说对呢?个人的感觉是:说对了,但是只说了一半。说对的部分是它点出了SOTIF关注的核心风险类别。没说到的部分,是它省略了从“识别风险”到“证明安全”之间的那一整套工程方法。
SOTIF不是单纯的一个概念,而是一套需要落地的工程体系,它要求工程师能够系统性地找出算法的“软肋”在哪儿(即,触发条件的识别);借助海量测试去覆盖那些“未知”的角落;借助测试台架安全可复现地进行极端工况的测试(借助VaHIL);以及重要的是要把用户的真实行为考虑进设计里(人为误用建模)。但是这个体系里的每个方面都不是简单的,也没有一个能跳过去。毕竟,安全这件事,从来就没有捷径。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)