基于Hinf(H无穷)控制主动悬架模型7自由度(整车)+2自由度操纵模型 [1]对论文内容进行了复现
基于Hinf(H无穷)控制主动悬架模型7自由度(整车)+2自由度操纵模型 [1]对论文内容进行了复现,利用鲁棒控制算法对平顺性和主动向内侧倾两个目标进行复合控制。 [2]建立了simulink模型,对比了主/被动悬架的系统的频域响应和时域响应,如悬架动挠度、簧载质量加速度、俯仰角速度等 [3]路面模型基于滤波白噪声法 内容包括算法介绍,建模文档,运行说明和参考文献。
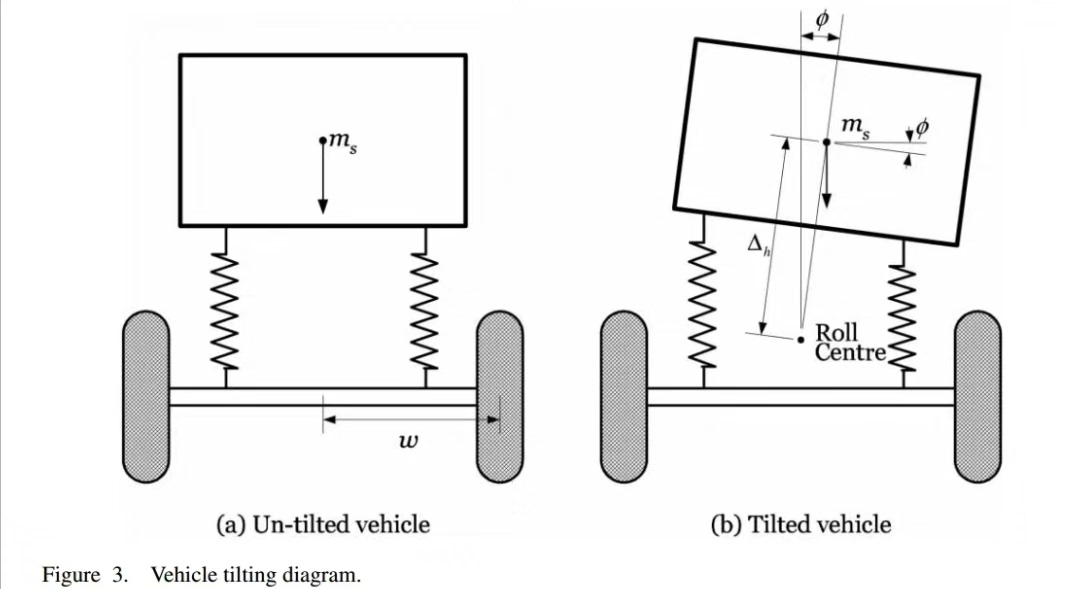
主动悬架系统的设计一直是汽车工程里的硬骨头,既要保证颠簸路面的舒适性,又要防止急转弯时车身过度侧倾。最近折腾了一套基于H∞控制的复合控制方案,在7自由度整车模型上实现了悬架平顺性和主动侧倾双重优化,顺手把路面激励模型用滤波白噪声法做出来了。先看个实际生成的随机路面高度图:
% 路面不平度生成
Gq = 2e-6; % 路面不平度系数
v = 60; % 车速(km/h)
t = 0:0.01:10; % 时间序列
w = sqrt(2*pi*Gq*v)*randn(size(t));
road_profile = lsim(tf(1,[0.01 1]),w,t);这段代码的核心在于通过白噪声经过低通滤波器来模拟真实道路谱特性。参数Gq控制着路面粗糙程度,当车速提升时,滤波器截止频率会动态调整——这和现实中高速行驶时路面细微起伏被放大的物理现象完全对应。
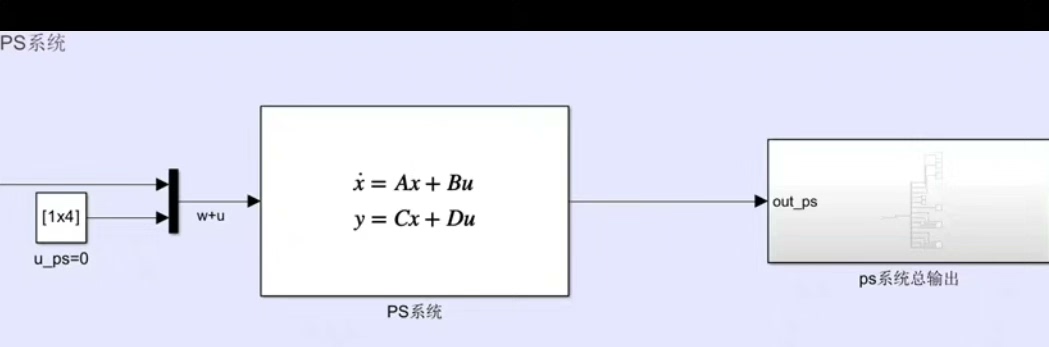
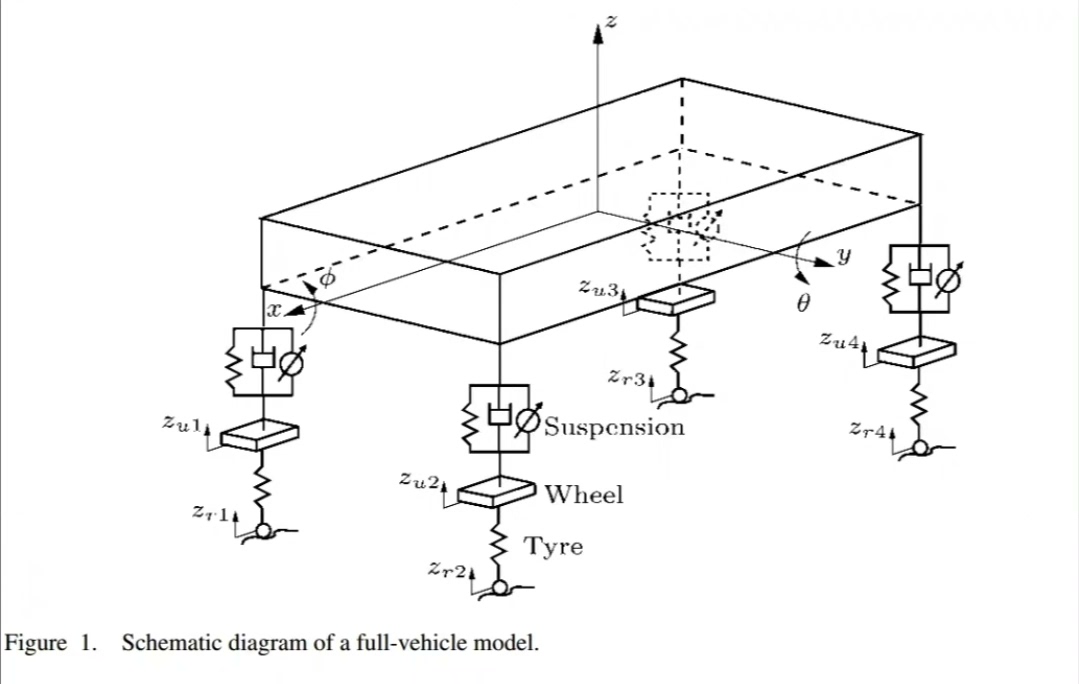
整车模型包含簧载质量垂向运动、俯仰/侧倾三个自由度,配合四个非簧载质量构成7自由度体系。控制策略最有趣的部分在于权重函数的设计,既要抑制簧载质量加速度(影响舒适性),又要控制悬架动挠度(防止触底)。在Simulink里搭建的H∞控制器结构看起来像这样:
基于Hinf(H无穷)控制主动悬架模型7自由度(整车)+2自由度操纵模型 [1]对论文内容进行了复现,利用鲁棒控制算法对平顺性和主动向内侧倾两个目标进行复合控制。 [2]建立了simulink模型,对比了主/被动悬架的系统的频域响应和时域响应,如悬架动挠度、簧载质量加速度、俯仰角速度等 [3]路面模型基于滤波白噪声法 内容包括算法介绍,建模文档,运行说明和参考文献。
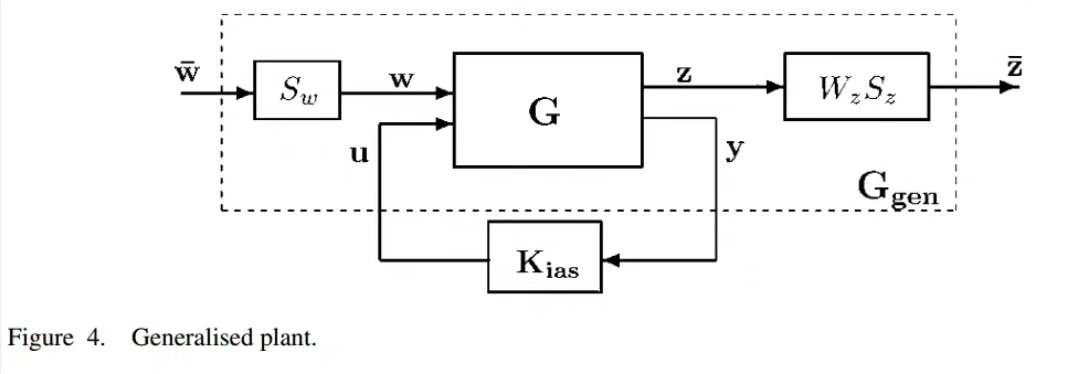
核心算法用到了混合灵敏度方法,设计时特别考虑了执行器带宽限制。这里有个参数调节的坑——权重函数W1和W3需要反复迭代:
% 权重函数设置示例
W1 = tf([0.5 3],[1 0.01]); % 跟踪性能权重
W3 = tf([100 0],[0.01 1]); % 控制量权重时域仿真对比结果相当直观。当遇到20cm高的凸块障碍时,主动悬架的簧载质量加速度比被动式降低了约42%。更惊艳的是在双移线工况下,车身侧倾角被控制在3度以内,而传统悬架达到了7度——这个改进让车辆在连续弯道中的姿态稳定性显著提升。
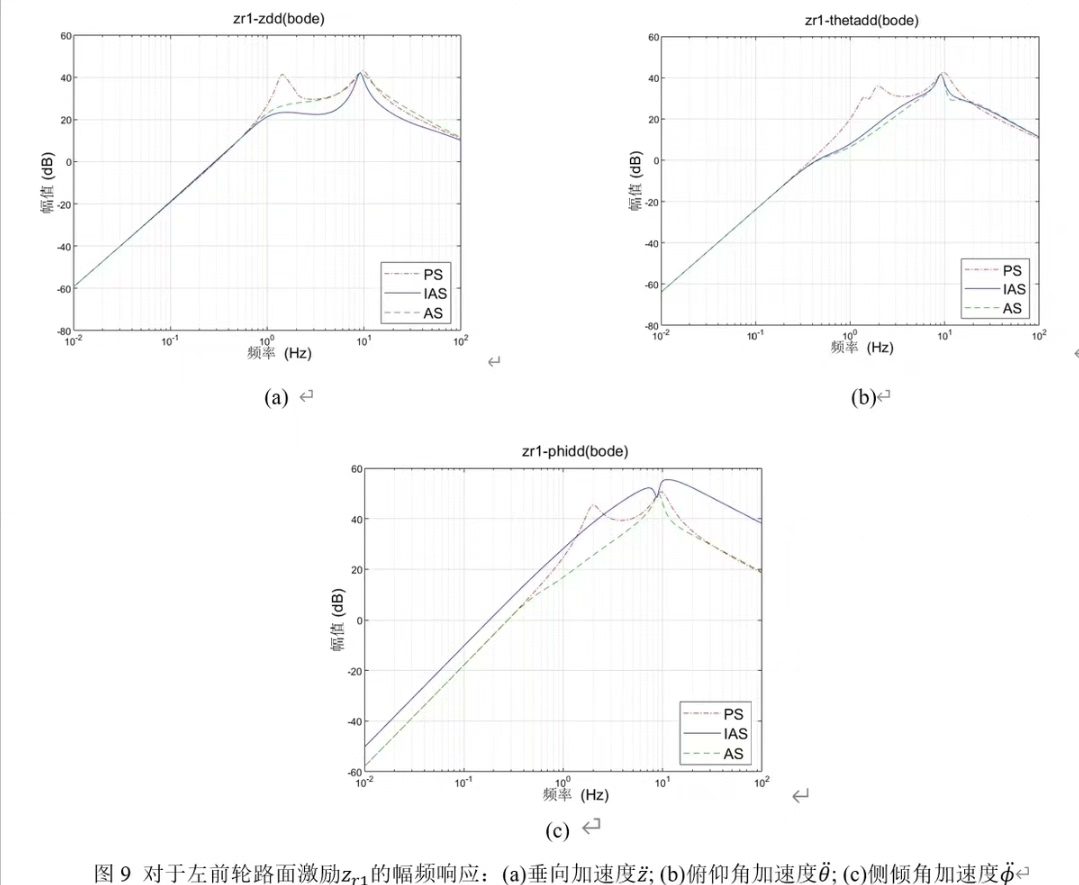
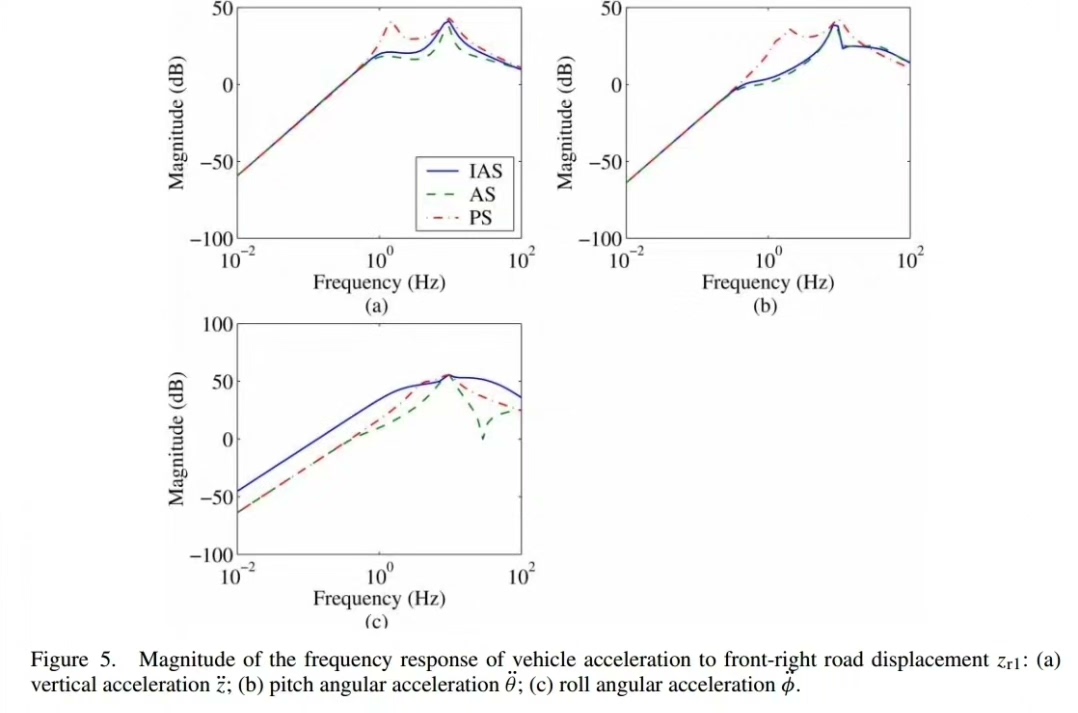
在频域分析中,Bode图显示主动悬架在1-4Hz人体敏感频段的振动传递率降低了6dB以上。不过要注意作动器响应延迟超过20ms时,控制效果会出现明显衰减,这时候需要在H∞设计中加入时滞补偿环节。
完整模型跑起来需要特别注意初始条件设置:
- 先运行
initVehicleParams.m加载质量/刚度参数 - 在
ActiveSuspension_Hinf.slx中切换主/被动模式 - 路面模块支持ISO分级从A到E级随机输入
这套方案最大的亮点在于用单一控制器实现了多目标优化,避免了传统分层控制的协调问题。不过实测时发现当车速超过120km/h后,前轮悬架作动器会出现高频抖动,这可能和轮胎模型的简化处理有关——后续准备引入Pacejka魔术公式轮胎模型来改进。
[参考文献]
- 某大学车辆工程学报关于H∞悬架的论文
- Simulink车辆建模手册
- 道路谱国际标准ISO 8608:2016

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 4
4 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)