基于七自由度车辆模型的 UKF 与 EKF 参数估计之旅
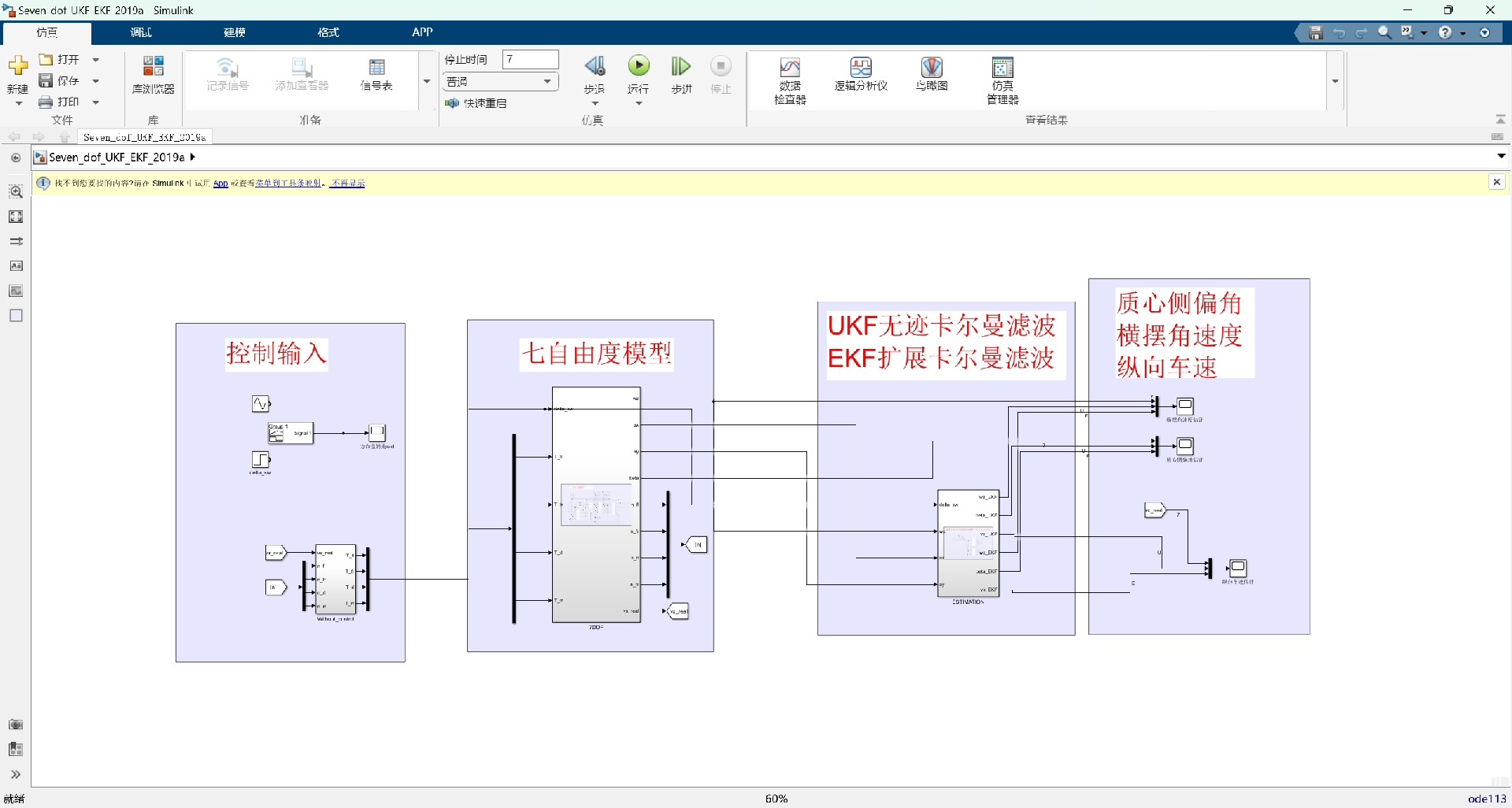
基于七自由度车辆模型的UKF,EFK对质心侧偏角,横摆角速度,纵向车速的估计。 七自由度车辆动力学模型 UKF无迹卡尔曼滤波 EKF扩展卡尔曼滤波 质心侧偏角 横摆角速度 纵向车速 参数估计 提供参考文献pdf 车辆模型建模word文档 UKF学习文档等
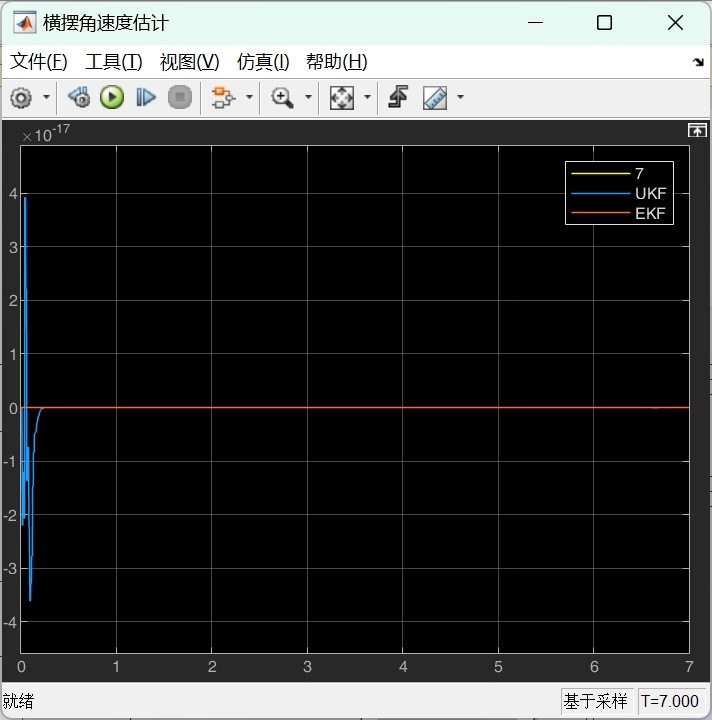
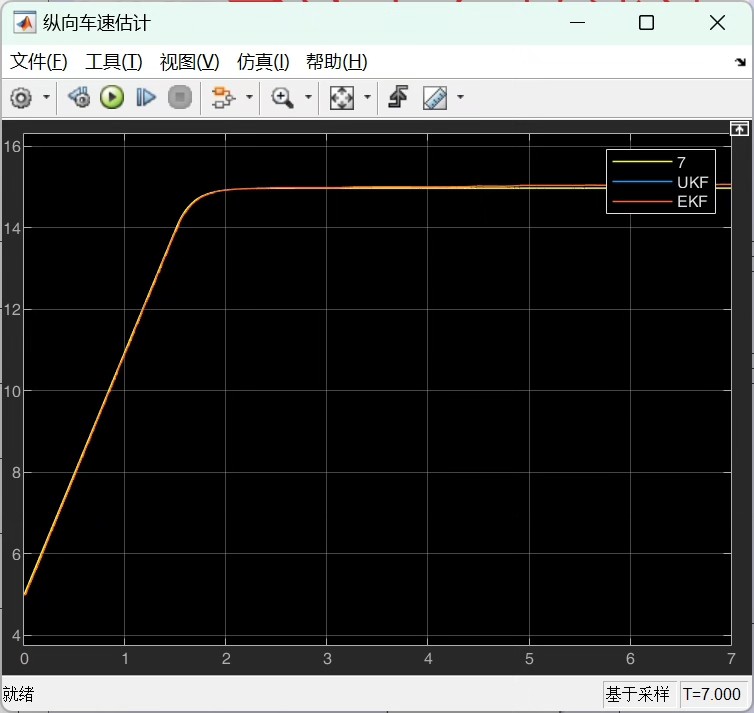
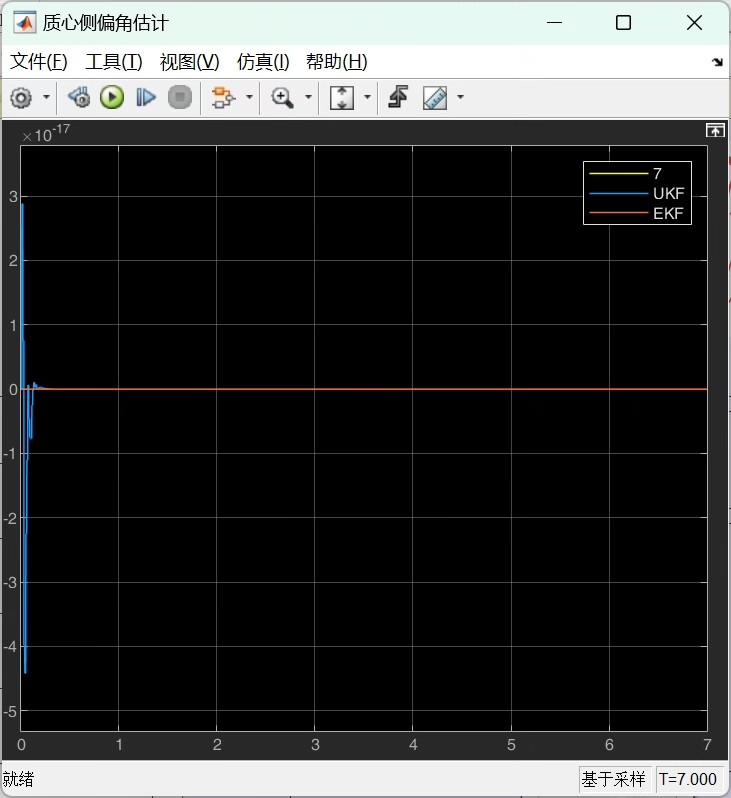
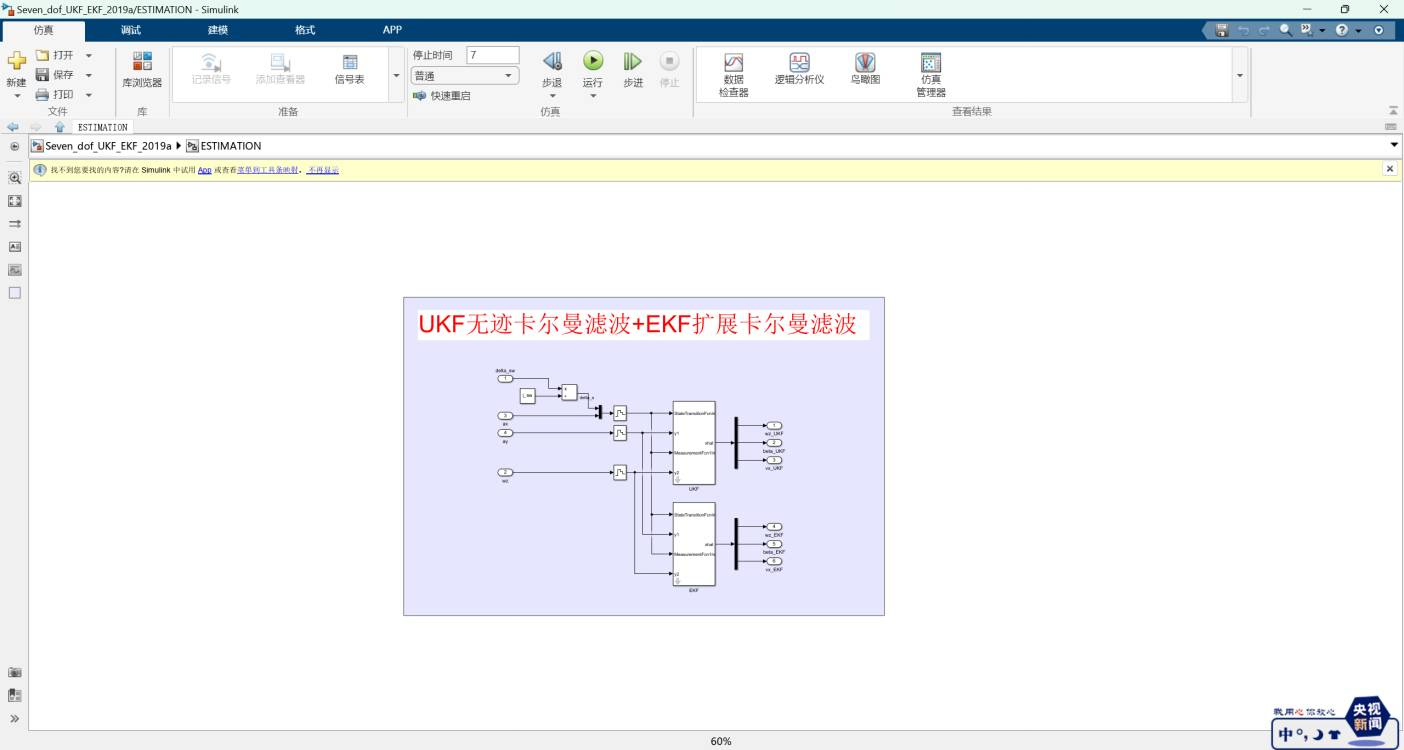
在车辆动力学研究领域,准确估计质心侧偏角、横摆角速度和纵向车速等关键参数至关重要。而基于七自由度车辆模型,运用 UKF(无迹卡尔曼滤波)和 EKF(扩展卡尔曼滤波)方法能实现较为精准的估计。今天咱就来唠唠这其中的门道。
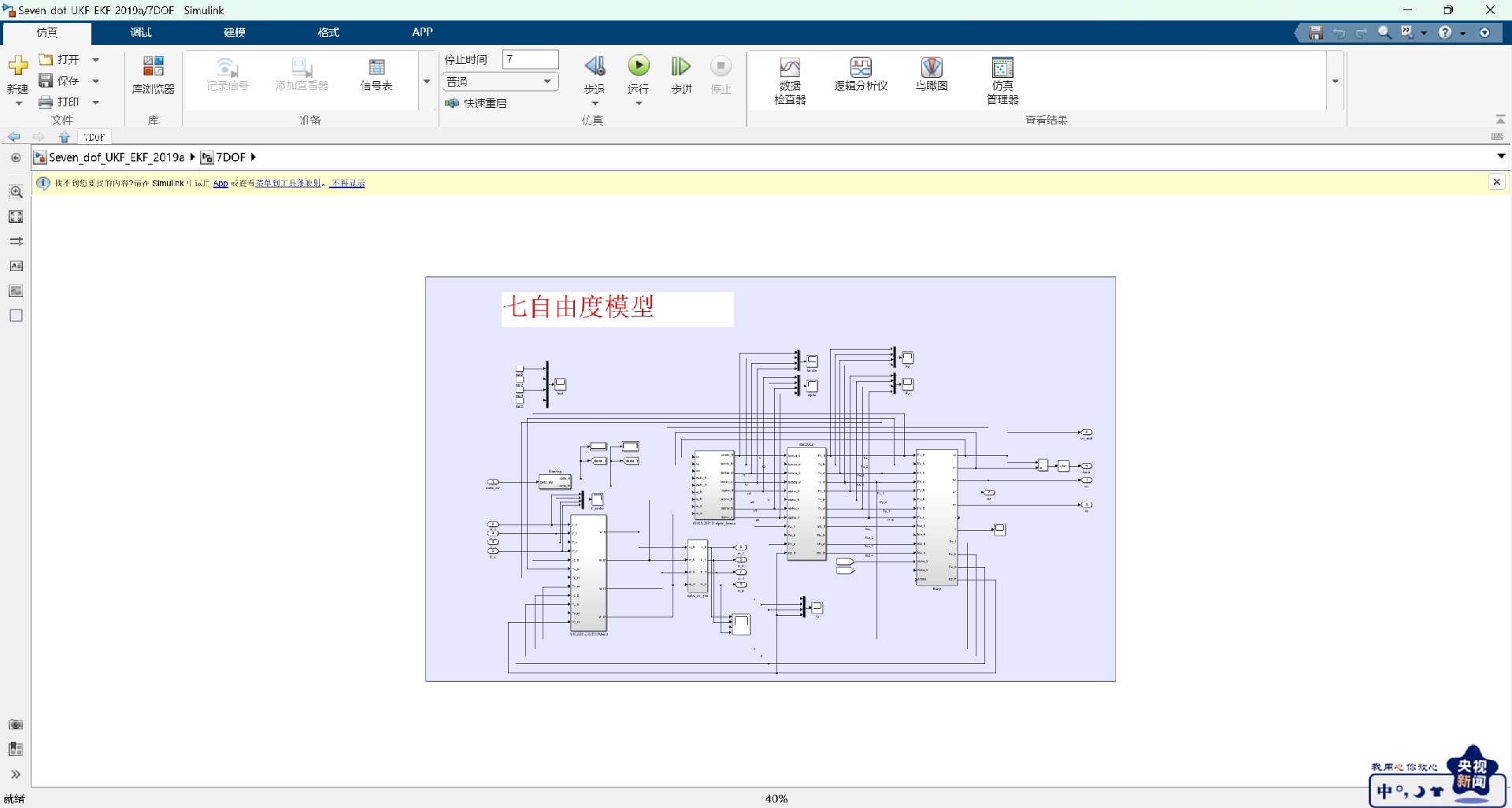
七自由度车辆动力学模型
七自由度车辆模型考虑了车辆的纵向、侧向、垂向运动以及横摆、侧倾、俯仰运动,更为全面地描述车辆动态特性。它是后续滤波算法施展拳脚的基础舞台。例如,简单来说,车辆的运动方程可以表示为:
\[
\begin{cases}
m(\dot{v}x - vy\omegar) = F{x1} + F{x2} + F{x3} + F_{x4} \\
m(\dot{v}y + vx\omegar) = F{y1} + F{y2} + F{y3} + F_{y4} \\
Iz\dot{\omega}r = lf(F{y1} + F{y2}) - lr(F{y3} + F{y4})
基于七自由度车辆模型的UKF,EFK对质心侧偏角,横摆角速度,纵向车速的估计。 七自由度车辆动力学模型 UKF无迹卡尔曼滤波 EKF扩展卡尔曼滤波 质心侧偏角 横摆角速度 纵向车速 参数估计 提供参考文献pdf 车辆模型建模word文档 UKF学习文档等
\end{cases}
\]
这里 \(m\) 是车辆质量,\(vx\) 是纵向车速,\(vy\) 是侧向车速,\(\omegar\) 是横摆角速度,\(F{xi}\) 和 \(F{yi}\) 分别是轮胎的纵向力和侧向力,\(lf\) 和 \(l_r\) 是车辆质心到前后轴的距离。这个模型细致地刻画了车辆各方向的受力与运动关系,为参数估计提供了可靠依据。
UKF 无迹卡尔曼滤波
UKF 是一种非线性滤波算法,它不像传统线性卡尔曼滤波要求系统必须是线性的。UKF 通过一组 Sigma 点来近似非线性分布。
下面是一个简单的 Python 代码示例来展示 UKF 对质心侧偏角估计的大致过程(仅为示意,实际需更多细节处理):
import numpy as np
# 定义一些参数
n = 2 # 状态维度
m = 1 # 观测维度
alpha = 0.001
beta = 2
kappa = 0
# 初始化状态
x_hat = np.zeros((n, 1))
P = np.eye(n)
# 过程噪声协方差
Q = np.eye(n) * 0.01
# 观测噪声协方差
R = np.eye(m) * 0.1
# Sigma 点生成
lamda = alpha**2 * (n + kappa) - n
Wm = np.zeros((2 * n + 1, 1))
Wc = np.zeros((2 * n + 1, 1))
Wm[0] = lamda / (n + lamda)
Wc[0] = lamda / (n + lamda) + (1 - alpha**2 + beta)
for i in range(1, 2 * n + 1):
Wm[i] = 1 / (2 * (n + lamda))
Wc[i] = 1 / (2 * (n + lamda))
# 状态转移函数(这里简单示意,实际应符合车辆模型)
def f(x):
return x
# 观测函数(这里简单示意,实际应符合车辆模型)
def h(x):
return np.array([[x[0]]])
# UKF 预测步骤
def ukf_predict(x_hat, P):
Xsig = np.zeros((n, 2 * n + 1))
Xsig[:, 0] = x_hat.flatten()
for i in range(n):
Xsig[:, i + 1] = x_hat.flatten() + np.sqrt((n + lamda) * P)[:, i]
Xsig[:, i + n + 1] = x_hat.flatten() - np.sqrt((n + lamda) * P)[:, i]
x_hat_minus = np.zeros((n, 1))
P_minus = np.zeros((n, n))
for i in range(2 * n + 1):
x_hat_minus = x_hat_minus + Wm[i] * f(Xsig[:, i]).reshape((n, 1))
for i in range(2 * n + 1):
P_minus = P_minus + Wc[i] * (f(Xsig[:, i]).reshape((n, 1)) - x_hat_minus) @ (f(Xsig[:, i]).reshape((n, 1)) - x_hat_minus).T
P_minus = P_minus + Q
return x_hat_minus, P_minus
# UKF 更新步骤
def ukf_update(x_hat_minus, P_minus, z):
Xsig = np.zeros((n, 2 * n + 1))
Xsig[:, 0] = x_hat_minus.flatten()
for i in range(n):
Xsig[:, i + 1] = x_hat_minus.flatten() + np.sqrt((n + lamda) * P_minus)[:, i]
Xsig[:, i + n + 1] = x_hat_minus.flatten() - np.sqrt((n + lamda) * P_minus)[:, i]
z_hat = np.zeros((m, 1))
Pzz = np.zeros((m, m))
Pxz = np.zeros((n, m))
for i in range(2 * n + 1):
z_hat = z_hat + Wm[i] * h(Xsig[:, i]).reshape((m, 1))
for i in range(2 * n + 1):
Pzz = Pzz + Wc[i] * (h(Xsig[:, i]).reshape((m, 1)) - z_hat) @ (h(Xsig[:, i]).reshape((m, 1)) - z_hat).T
Pxz = Pxz + Wc[i] * (Xsig[:, i].reshape((n, 1)) - x_hat_minus) @ (h(Xsig[:, i]).reshape((m, 1)) - z_hat).T
Pzz = Pzz + R
K = Pxz @ np.linalg.inv(Pzz)
x_hat = x_hat_minus + K @ (z - z_hat)
P = P_minus - K @ Pzz @ K.T
return x_hat, P
# 模拟观测数据
z = np.array([[0.1]])
x_hat_minus, P_minus = ukf_predict(x_hat, P)
x_hat, P = ukf_update(x_hat_minus, P_minus, z)
print("估计的质心侧偏角:", x_hat[0][0])在这段代码中,首先定义了 UKF 所需的参数,包括状态维度、观测维度、Sigma 点参数等。然后通过 f 和 h 函数定义了状态转移和观测函数(虽然这里只是简单示意,实际应紧密结合车辆模型)。ukfpredict 和 ukfupdate 函数分别实现了 UKF 的预测和更新步骤。通过 Sigma 点的生成、状态预测、协方差预测以及观测更新等一系列操作,最终实现对质心侧偏角的估计。
EKF 扩展卡尔曼滤波
EKF 也是用于非线性系统的滤波算法,它通过对非线性函数进行一阶泰勒展开,将非线性问题近似为线性问题来应用卡尔曼滤波框架。
同样以 Python 代码简单展示 EKF 对横摆角速度估计过程(仅为示意):
import numpy as np
# 定义状态转移函数的雅克比矩阵(这里简单示意,实际应符合车辆模型)
def F(x):
return np.array([[1, 0], [0, 1]])
# 定义观测函数的雅克比矩阵(这里简单示意,实际应符合车辆模型)
def H(x):
return np.array([[1, 0]])
# 初始化状态
x_hat = np.zeros((2, 1))
P = np.eye(2)
# 过程噪声协方差
Q = np.eye(2) * 0.01
# 观测噪声协方差
R = np.eye(1) * 0.1
# EKF 预测步骤
def ekf_predict(x_hat, P):
x_hat_minus = F(x_hat) @ x_hat
P_minus = F(x_hat) @ P @ F(x_hat).T + Q
return x_hat_minus, P_minus
# EKF 更新步骤
def ekf_update(x_hat_minus, P_minus, z):
K = P_minus @ H(x_hat_minus).T @ np.linalg.inv(H(x_hat_minus) @ P_minus @ H(x_hat_minus).T + R)
x_hat = x_hat_minus + K @ (z - H(x_hat_minus) @ x_hat_minus)
P = (np.eye(2) - K @ H(x_hat_minus)) @ P_minus
return x_hat, P
# 模拟观测数据
z = np.array([[0.2]])
x_hat_minus, P_minus = ekf_predict(x_hat, P)
x_hat, P = ekf_update(x_hat_minus, P_minus, z)
print("估计的横摆角速度:", x_hat[1][0])在这个代码示例中,先定义了状态转移函数和观测函数的雅克比矩阵 F 和 H(实际要根据车辆模型精确推导)。ekfpredict 和 ekfupdate 函数分别实现预测和更新过程。通过对非线性函数的线性近似(雅克比矩阵),将卡尔曼滤波应用到非线性的车辆模型中,实现对横摆角速度的估计。
对比与总结
UKF 和 EKF 都在基于七自由度车辆模型的参数估计中发挥重要作用。UKF 直接通过 Sigma 点近似非线性分布,避免了复杂的雅克比矩阵计算,在一些高度非线性情况下表现更好;而 EKF 通过线性近似,实现相对简单,但在非线性较强时可能出现较大误差。
文中提供的参考文献 pdf、车辆模型建模 word 文档以及 UKF 学习文档等资料,能帮助大家更深入地研究这一领域。希望通过今天的分享,大家对基于七自由度车辆模型的 UKF 和 EKF 参数估计有更清晰的认识,在相关研究和实践中能灵活运用这两种强大的滤波算法。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)