基于SMC指数趋近律滑模控制的三自由度机械臂控制器simulink建模与仿真
目录
1.课题概述
机械臂作为工业自动化、智能机器人领域的核心执行机构,其轨迹跟踪精度、抗干扰能力与动态响应速度直接决定作业性能。传统PID控制在模型失配、外部扰动与参数摄动场景下易出现跟踪误差偏大、响应滞后等问题,而滑模变结构控制(SMC)凭借对系统不确定性与外部干扰的强鲁棒性、控制结构简洁易实现等优势,成为机械臂高精度控制的优选方案。指数趋近律作为滑模控制中优化趋近运动的核心方法,可有效解决传统滑模控制存在的抖振问题,同时保证系统状态快速趋近滑模面。
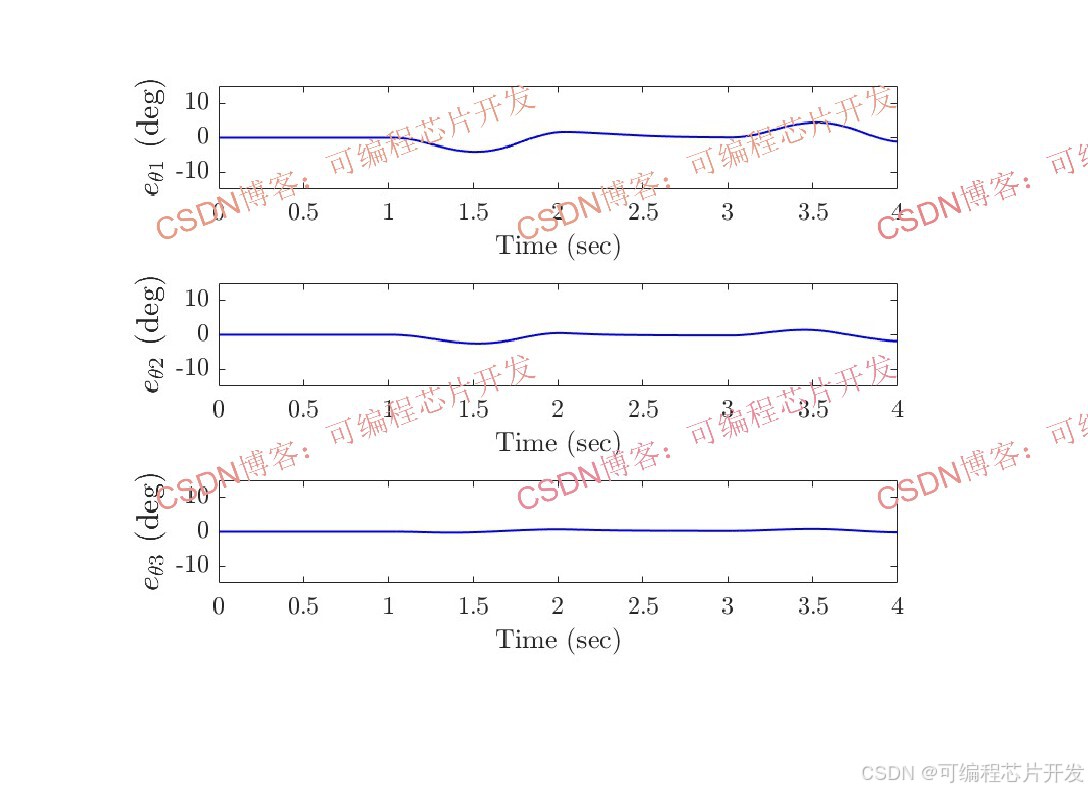
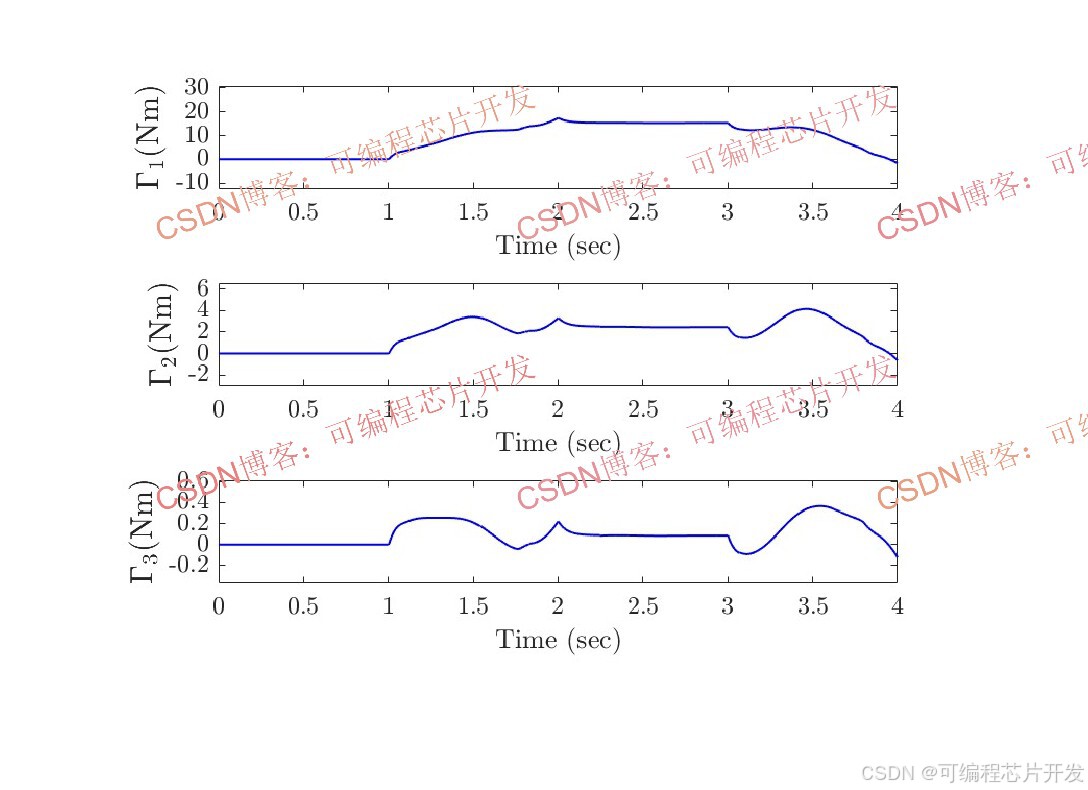
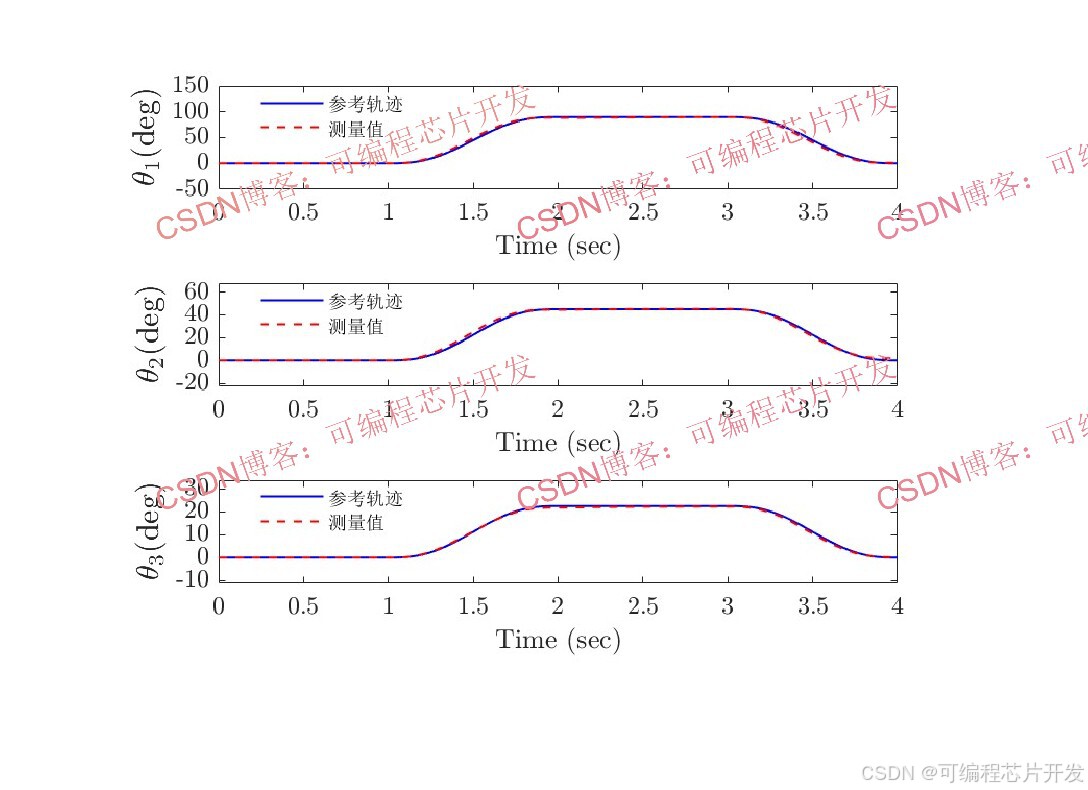
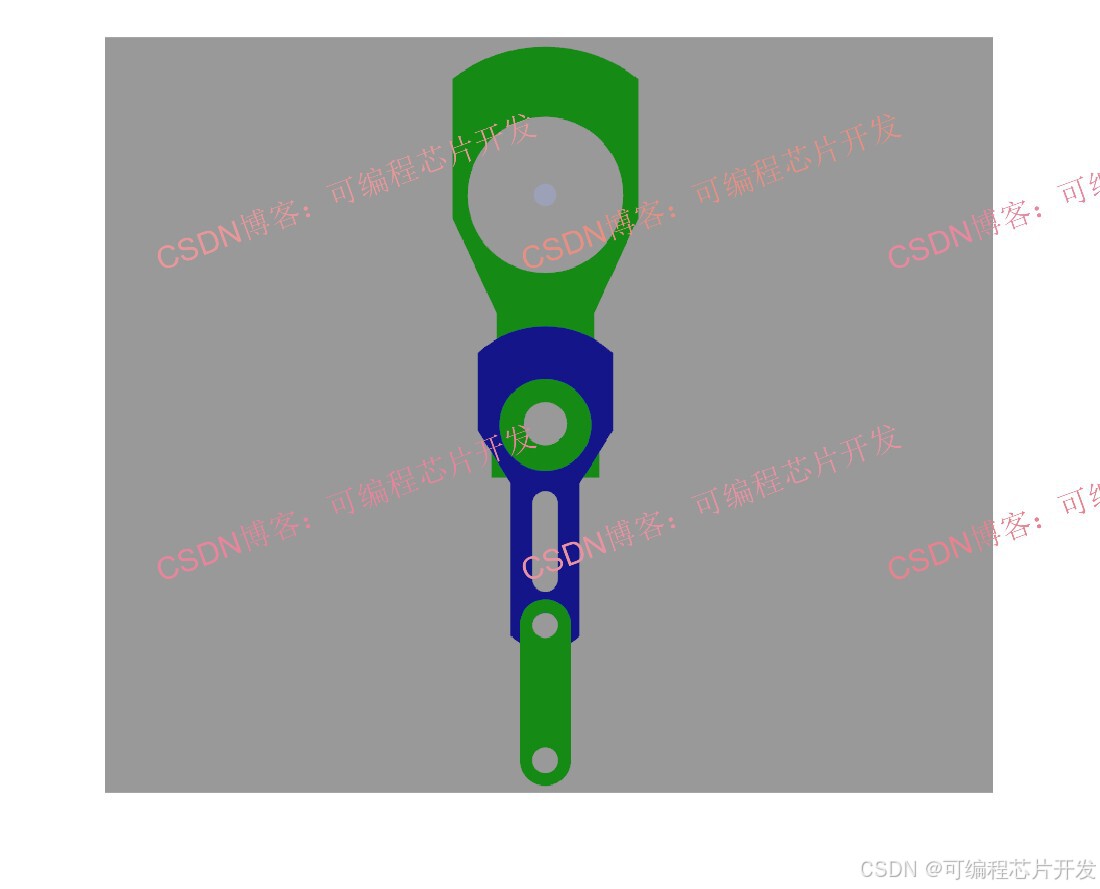
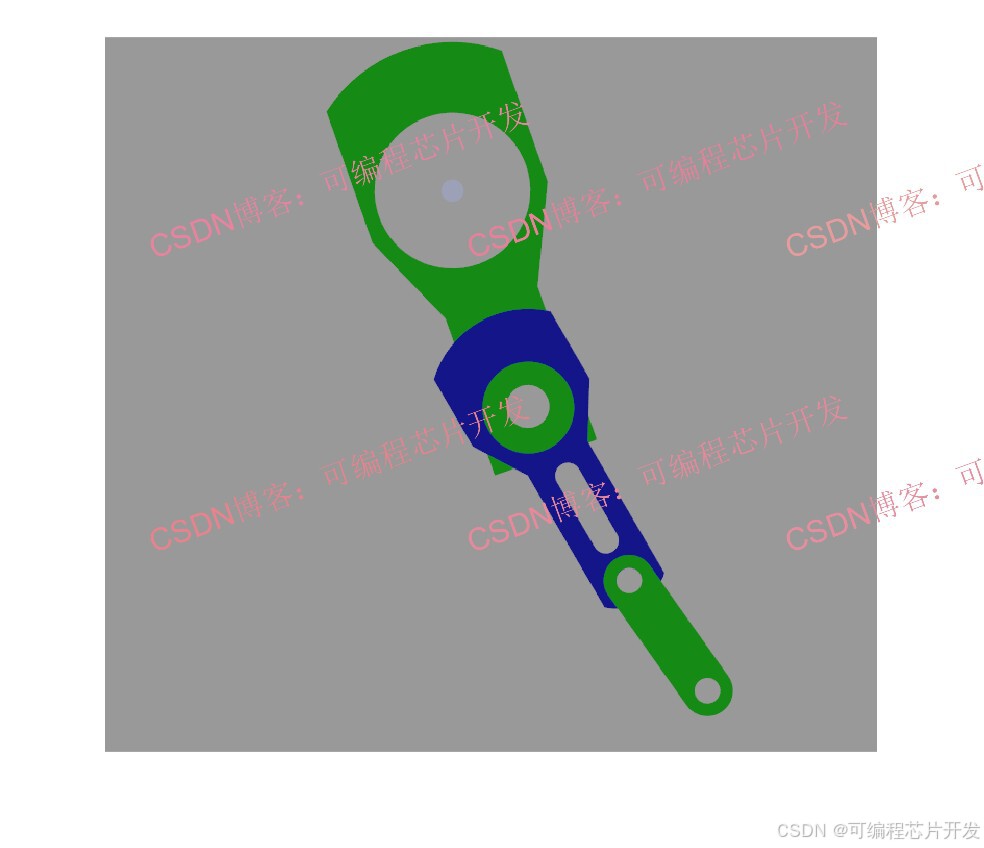
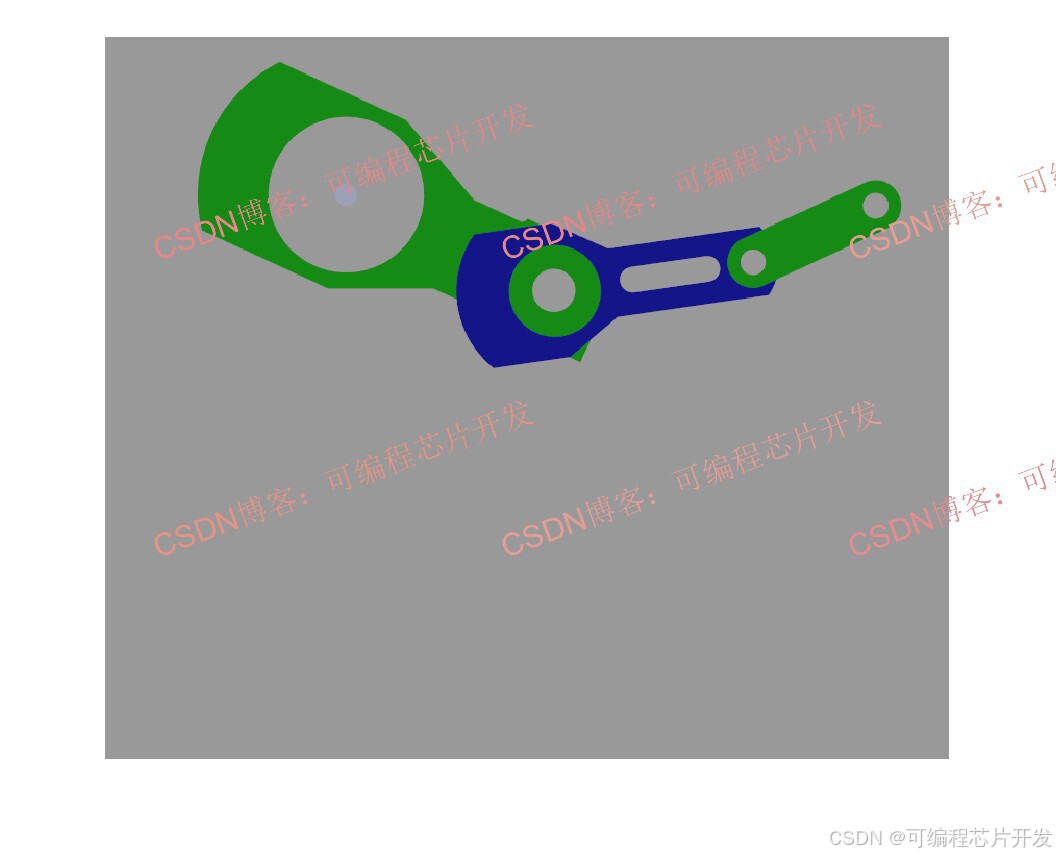
2.系统仿真结果
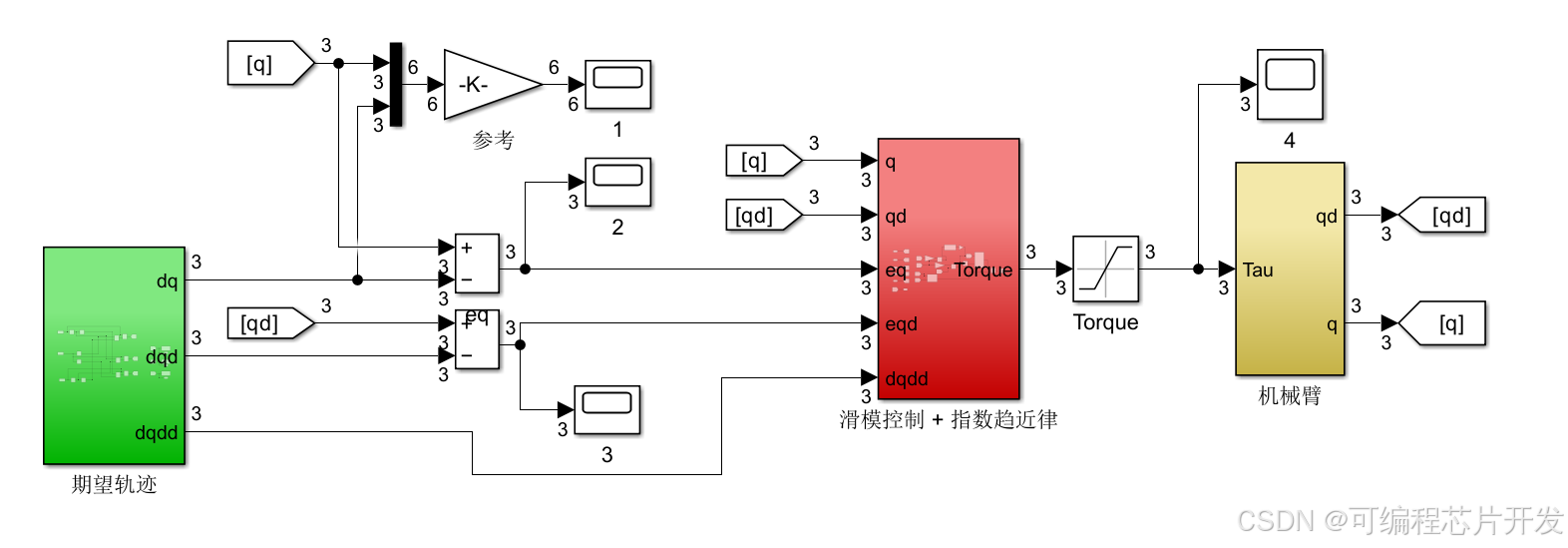
3.核心程序或模型
版本:Matlab2024b
% 仿真采样时间(步长)1ms
Ts = 1e-3;
% 控制周期1ms
Tg = 1e-3;
grados = 3;
% simscape物理参数增益系数
gain = 1.0;
% 外部扰动幅值(无扰动)
Pert = 0.0;
% 轨迹初始位置偏移量(角度)
Offset = 0.0;
% 加载机器人物理参数文件(质量、长度、惯量等)
DataFile;
% 关节力矩限制(最大/最小输出力矩)
limU = [60 40 25]';% 三个关节最大力矩
limD =-[60 40 25]';% 三个关节最小力矩
% 总仿真时间4秒
Tsim = 4;
% 预设5阶多项式轨迹的关节角度关键点
pos = [0 0 pi/2 pi/2 0; 0 0 pi/4 pi/4 0;0 0 pi/8 pi/8 0];
% 调用5次多项式插值函数,生成平滑轨迹:角度、角速度、角加速度
[Qcoef,time1,dq,dqd,dqdd] = func_pol5(pos,pos*0,pos*0,0,Tsim,Ts);
% 机器人初始角度、初始角速度
q0 = [0 0 0]';
qd0 = [0 0 0]';
% 动力学函数名称(重力、惯性、科氏离心力矩)148
4.系统原理简介
4.1 三自由度机械臂动力学模型
三自由度机械臂可简化为刚性连杆结构,忽略关节柔性、摩擦等次要因素,采用拉格朗日方程建立动力学模型,通用形式为:
![]()
式中各物理量定义清晰且符合机械系统动力学基本规律,q=[q1,q2,q3]T为机械臂三个关节角位移向量,q˙为关节角速度向量,q¨为关节角加速度向量;M(q)为 3×3 阶对称正定惯性矩阵,表征各关节运动惯性耦合特性;C(q,q˙)q˙为离心力与科氏力项,反映关节间速度耦合产生的附加力矩;G(q)为重力项,由连杆自重与姿态决定;τ为控制器输出的关节控制力矩向量,τd为外部扰动与未建模动态构成的集总干扰。
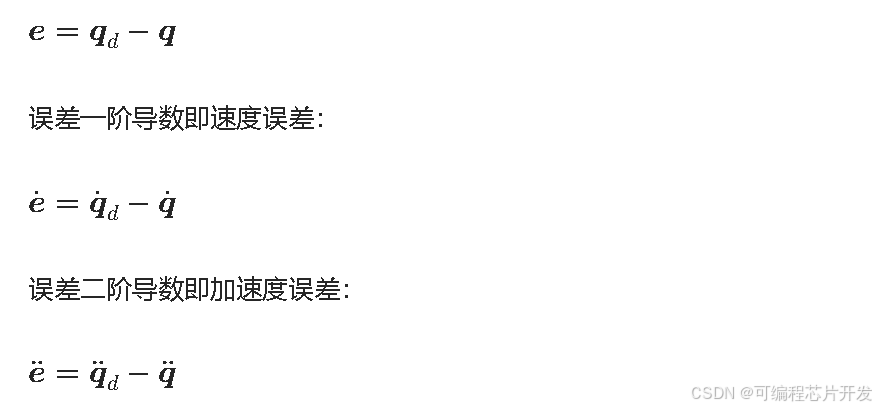
该模型体现机械臂强耦合、非线性特性,是设计滑模控制器的基础。控制目标为设计控制力矩τ,使关节实际角度q快速、无静差跟踪期望轨迹qd,同时抑制扰动影响。定义轨迹跟踪误差向量:
4.2 指数趋近律滑模控制原理
滑模面是滑模控制的核心,决定系统趋近稳态的动态品质,采用线性滑模面以保证误差快速收敛至零,滑模面函数设计为:
![]()
其中λ=diag(λ1,λ2,λ3)为3×3阶正定对角矩阵,λ1,λ2,λ3>0,用于调节误差收敛速度。当系统状态沿滑模面运动(s=0)时,满足e˙+λe=0,跟踪误差将以指数形式收敛至零,实现理想滑模运动。
对滑模面求导可得:
![]()
将动力学模型中的角加速度q¨代入上式,完成滑模动态与机械臂动力学的耦合推导,为控制律设计奠定基础。
传统滑模控制常采用等速趋近律,易引发严重抖振,影响机械臂运行平稳性。指数趋近律通过指数项实现快速趋近,通过鲁棒项抑制扰动,兼顾响应速度与抖振抑制,其数学表达式为:
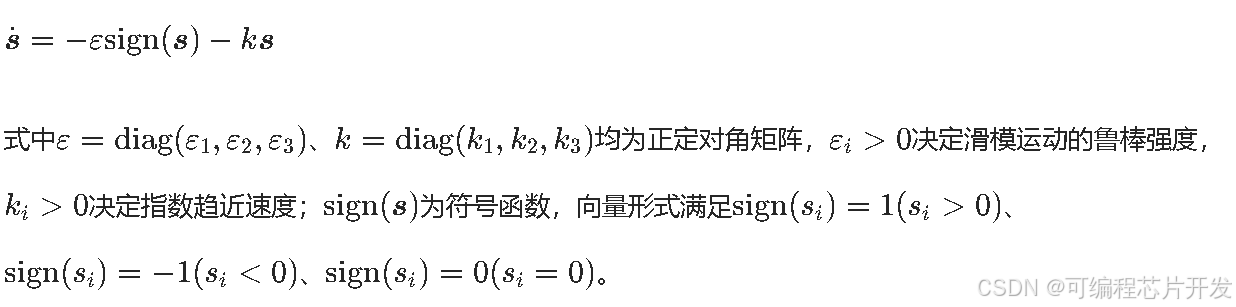
指数趋近律的核心优势在于:当系统状态远离滑模面时,−ks项提供强趋近动力,使状态快速靠近滑模面;当状态接近滑模面时,趋近速度自动减小,降低状态穿越滑模面的幅度,从原理上抑制抖振;同时−εsign(s)项可完全抵消集总干扰,保证滑模运动的鲁棒性。
为进一步削弱抖振,工程中常用饱和函数sat(s/ϕ)或双曲正切函数替代符号函数,ϕ>0为边界层厚度,在保证鲁棒性的同时实现平滑控制。
结合机械臂动力学模型、滑模面导数与指数趋近律,联立方程求解控制力矩。将加速度误差代入滑模面导数,再将动力学模型变形后的角加速度表达式代入,整理可得控制律:
![]()
该控制律由三部分构成:前馈补偿项抵消机械臂惯性、离心力与重力非线性项;滑模控制项实现状态快速趋近滑模面;鲁棒项抑制外部扰动与模型误差。
采用李雅普诺夫第二法验证系统稳定性,选取李雅普诺夫函数:

将指数趋近律代入导数表达式,可得:

5.完整工程文件
v v
关注后,GZH回复关键词:a32
或回复关键词:SMC

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)