魔搭社区创空间使用案例:安全帽检测项目搭建实录
一、魔搭社区的基本介绍
魔搭社区(ModelScope)是一个面向人工智能开发者的开源模型与应用生态平台,提供模型、数据集、创空间、Notebook 与相关文档能力。官方文档将创空间描述为一个高效的线上 AI 应用开发与分享平台,开发者可以基于社区模型,结合 Gradio 等组件快速搭建并部署可交互的 AI 应用。
从实际使用角度看,魔搭社区有几个很明显的特点。第一,它将“模型”“数据集”“应用部署”放在同一生态内,适合快速完成从模型选型到前端演示的完整闭环。第二,平台支持创空间创建与部署,既可以交互式创建,也可以采用编程式方式管理。第三,模型推理可通过 ModelScope SDK 的 pipeline 机制快速调用,这使得开发者不必从底层推理流程开始搭建。
在本次实践中,魔搭社区的价值主要体现在两点:一是能够直接调用平台已有的安全帽检测模型,缩短开发周期;二是可以将本地完成的 Gradio 项目上传到创空间并在线发布,形成可展示、可交互的应用原型。这种方式特别适合课程作业、项目展示和模型验证。
二、数据集、模型的使用范例
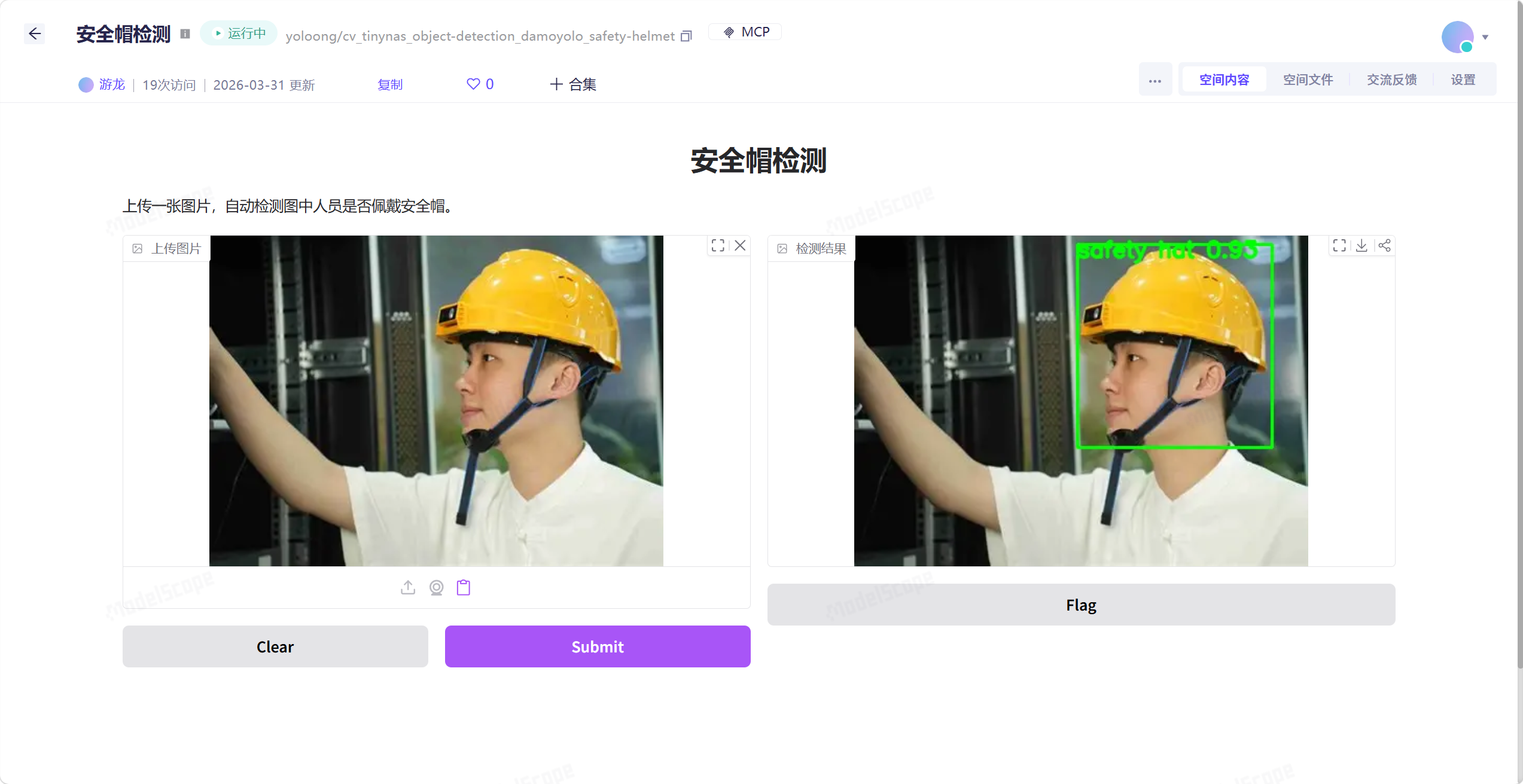
本次实践选取的核心模型是魔搭社区的实时安全帽检测模型 iic/cv_tinynas_object-detection_damoyolo_safety-helmet。官方页面说明,该模型属于基于 DAMOYOLO 的实时安全帽检测模型,训练数据来源包括公开的 SHWD 安全帽数据以及内部积累和互联网相关数据。
数据集方面,本次实践主要参考了两个官方数据集。其一是 modelscope/safetyhelmet_dataset,该数据集用于安全帽检测模型测试,官方说明其为公开数据集 SHWD 的子集。其二是 modelscope/safetyhelmet_detection_for_train,用于安全帽检测训练与微调,适合后续扩展到模型训练场景。
在使用方式上,ModelScope 官方推荐通过 pipeline 进行模型推理。pipeline 封装了数据预处理、模型前向推理与后处理等完整流程,适合快速验证任务效果。
本次安全帽检测项目的基本使用思路如下:
from modelscope.pipelines import pipeline
from modelscope.utils.constant import Tasks
detector = pipeline(
Tasks.domain_specific_object_detection,
model='damo/cv_tinynas_object-detection_damoyolo_safety-helmet',
trust_remote_code=True
)再结合 OpenCV 对返回的检测框进行绘制,就可以将识别结果显示到图片上。前端部分采用 Gradio,构建“上传图片—执行检测—返回结果图”的交互页面。这个模式的优势是结构清晰、实现成本低,尤其适合创空间部署。
从本次实践经验来看,数据集和模型的使用流程可以概括为以下三步。第一步,在魔搭社区选择任务相关模型与数据集,确认其用途是测试、训练还是微调。第二步,在本地通过 pipeline 调通最小推理闭环。第三步,将本地验证通过的代码接入 Gradio 页面,准备部署到创空间。这样的顺序明显比“先传创空间再逐步修”更高效,也更稳妥。模型与数据集选择的正确性,直接决定后续调试成本。
三、创空间建立的步骤和调试方法
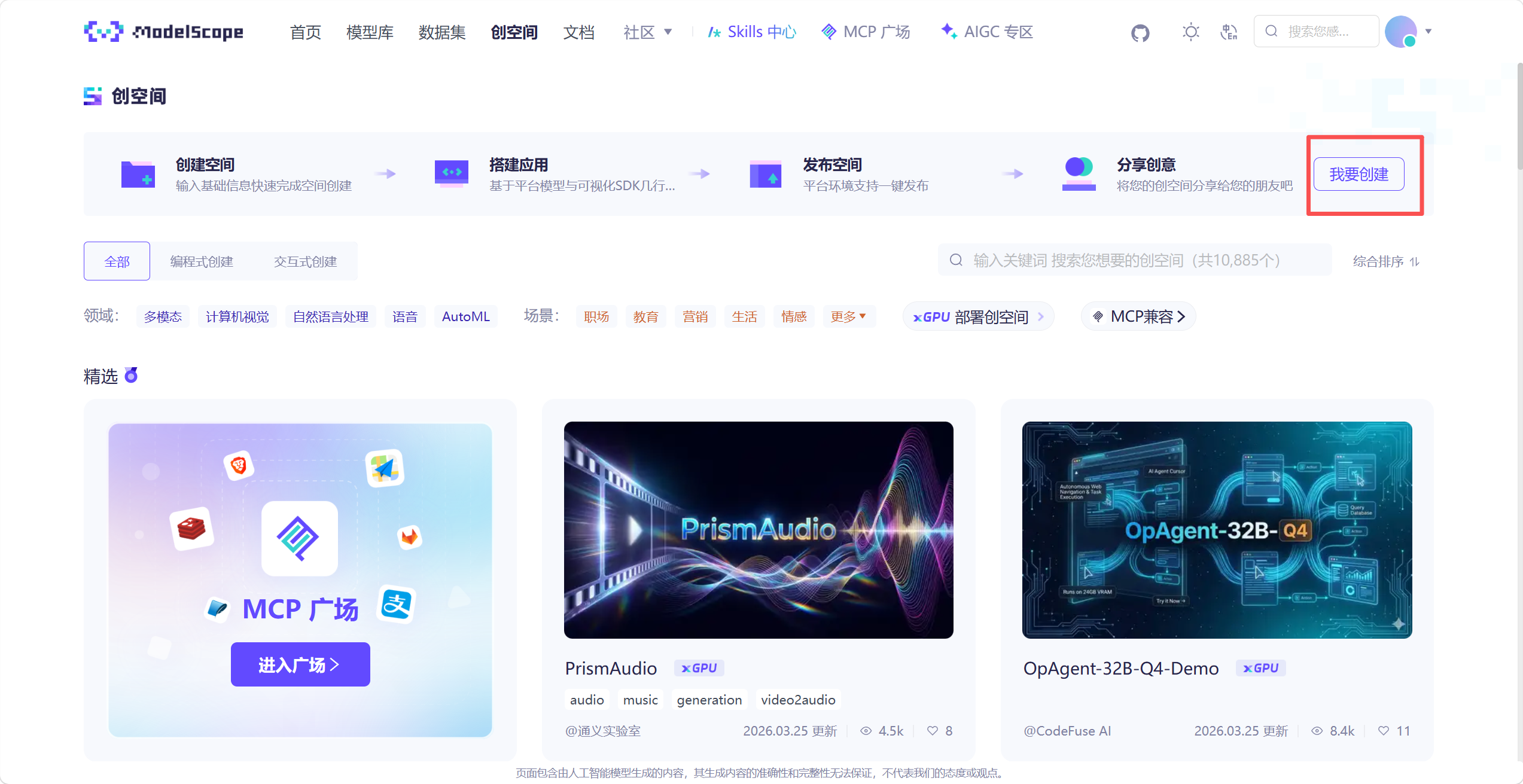
根据魔搭官方文档,创空间支持交互式创建与编程式创建。实际操作中,完成一个基于 Gradio 的创空间通常包括:创建空间、配置 SDK 与镜像、上传代码文件、发布部署、查看日志与调试。
结合本次安全帽检测案例,创空间建立步骤可以整理为以下流程。
1. 创建创空间
首先登录魔搭社区,在创空间入口新建项目,填写空间名称、描述等基础信息,并设置 SDK 类型为 gradio。如果项目以 Python 应用形式提供交互页面,这一步是最直接的选择。官方文档表明,创空间正是为此类在线 AI 应用搭建而设计。
2. 选择运行环境
本次实践中使用的是 Python 3.11、Gradio 6.2.0,以及魔搭推荐镜像 ubuntu22.04-py311-torch2.9.1-modelscope1.35.0。镜像选择会直接影响依赖兼容性,因此应尽量与本地测试环境保持一致,避免“本地可跑、云端报错”的情况。

3. 编写并上传项目文件
本次项目的核心文件主要包括:
- app.py:Gradio 页面与模型推理主程序
- requirements.txt:依赖版本说明
- README.md:项目说明文档
上传方式可以通过 Git 仓库推送,也可以通过创空间界面上传文件。若使用 Git 管理,建议先在本地初始化并提交,再推送到对应创空间仓库。
4. 发布创空间
这一点是本次实践中最关键、也最容易被忽略的地方:上传代码后,页面中并不会直接出现“开始检测”之类的完整可用功能状态,只有在创空间真正发布并启动后,才能看到运行结果。 也就是说,上传文件并不等于应用已经成功可用,很多问题必须等到发布后才能暴露出来。

5. 查看日志并调试
创空间调试的核心依赖运行日志。若发布失败,通常只能从日志中定位问题来源,例如依赖缺失、版本不兼容、模型加载参数错误等。本次安全帽案例就连续遇到了多轮问题,最终都是通过失败日志逐步定位并修复的。
结合本次实践,我认为创空间的调试方法应遵循以下原则:
第一,先本地调通,再上传创空间。这是最重要的一条。因为创空间的调试方式并不友好,发布前无法完整验证交互逻辑,发布后又往往只能通过失败日志倒推问题,效率明显低于本地调试。
第二,依赖版本必须锁定。例如 numpy、scipy、modelscope、gradio、opencv-python-headless 这类核心包,必须在 requirements.txt 中明确指定版本,否则极容易因平台环境差异引发兼容问题。
第三,优先构建最小可运行版本。先实现“上传图片—返回结果”这一主链路,确保流程可通,再逐步增加界面优化、提示语、样例图等附加功能。
第四,遇到错误先读日志,不盲目改代码。很多创空间报错并不是业务逻辑写错,而是依赖环境、模型参数或运行权限问题。日志是判断问题性质的第一依据。
四、常见问题及解决方法
本次安全帽检测实践具有较强代表性,几乎覆盖了创空间部署中最常见的几类问题。
1. 上传后看不到实际执行效果
这是最容易误判的问题。很多人会以为文件上传完成就代表应用已经能运行,但实际上,只有创空间发布并启动后,才会真正执行 app.py 并暴露运行结果。
解决方法:先在本地用相同依赖跑通项目,再上传创空间。上传后重点查看发布状态和运行日志,而不是只看文件是否存在。
2. 依赖版本冲突
在本次实践中,首先遇到的是 numpy 与 scipy 的二进制兼容问题。表现为启动时导入失败,日志中出现版本不匹配或 ABI 错误。
解决方法:对关键依赖锁定稳定版本,例如固定 numpy==1.26.4、scipy==1.11.4,避免平台自动安装到不兼容的新版本。
3. 模型依赖缺失
后续实践中又出现了 easydict 缺失,导致 TinynasDetectionPipeline 无法正确构建。
解决方法:根据日志补充缺失依赖,并写入 requirements.txt,确保创空间发布时自动安装。
4. 模型要求额外加载权限
安全帽检测模型属于需要执行模型仓库额外代码的类型,因此若未设置 trust_remote_code=True,模型会在加载阶段断言失败。
解决方法:在 pipeline 中显式传入 trust_remote_code=True,确保模型可正常初始化。
5. 本地环境与云端环境不一致
如果本地使用的是不合适的 Python 版本,比如较新的 3.14,某些科学计算库可能没有预编译包,安装时会退化为源码编译,从而出现编译器缺失等问题。
解决方法:本地建议使用 Python 3.10 或 3.11,并尽可能与创空间镜像中的 Python 版本保持一致。
6. 仅靠在线调试效率低
创空间调试依赖发布后日志回看,这种方式具有明显的滞后性。一次改动往往需要重新发布后才能验证。
解决方法:采用“本地调试为主,创空间验证为辅”的策略。本地先验证依赖安装、模型加载和页面交互无误,再将代码上传进行最终展示部署。
五、安全帽检测案例总结
本次实践以“安全帽检测”为主题,完整经历了从模型选择、数据集确认、本地复现、创空间部署到问题修复的全过程。这个案例表明,魔搭社区非常适合快速完成 AI 应用原型搭建,尤其适合课程实验、项目演示和初步部署验证。其优势在于模型与数据集资源集中、创空间部署门槛相对较低、Gradio 接入方便,能够较快形成在线应用。
但与此同时,本次实践也暴露出创空间调试方式的局限:上传代码后并不能直接看到完整执行结果,必须发布后才能验证;一旦失败,开发者主要依赖失败日志定位问题,调试体验并不友好。因此,在实际开发中,应坚持“本地先成功,线上再发布”的原则。
通过这次安全帽检测实践,我更加清楚地认识到:AI 应用开发不仅是模型调用问题,更是环境一致性、依赖管理、部署流程和日志分析能力的综合体现。只有把这些环节系统地串联起来,才能真正完成从模型到应用的落地。
六、结语
总体来看,魔搭社区为开发者提供了一个较为完整的 AI 开发生态,特别是在模型获取、数据集使用和在线部署方面具有明显优势。以本次安全帽检测项目为例,依托官方模型、数据集与创空间能力,可以较快完成一个目标检测类应用的原型实现。未来若进一步结合训练数据集、自定义前端页面和更多安全生产场景,还可以扩展为更加完整的工业视觉应用系统。
如果这篇文章对你有帮助,欢迎 点赞、收藏、评论支持一下,你的支持就是我持续更新的动力。
如果你也在做 ModelScope(魔搭社区)相关项目,欢迎来我的主页互相关注,一起交流模型实践、数据集使用和创空间部署经验。
我的 ModelScope (魔搭社区)个人主页,来互关呀~ :https://www.modelscope.cn/profile/yoloong
Github仓库源码:https://github.com/XXYoLoong/Safety-Helmet-Detection-Modelscope.git

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 13
13 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)