直流电机双闭环调速系统仿真模型及其参数计算与PI参数整定配套文档
直流电机双闭环调速系统仿真模型 [1]附带仿真模型参数计算配套文档。 [2]附带转速外环、电流内环PI参数整定配套文档。 功能:双闭环采用转速外环、电流内环,其中PI参数在报告里面有详细的整定教程,可以实现无静差跟踪 电机控制学子必备 [1]稳态指标:无静差 [2]动态指标:电流超调量σ_t≤5%;采用转速微分负反馈使转速超调量等于0。 基本数据为: 直流电动机:Unom=220V,Inom=136A,nnom=1460r/min,Ra=0.21Ω, 电枢电感La=0.00021H, 电枢电路总电阻RΣ=2.85Ω, 电枢电路总电感LΣ=0.216H, 电流允许过载倍数λ=1.5, 折算到电动机飞轮惯量GD2=22.5Nm2。 晶闸管整流装置放大倍数Ks=37.84,滞后时间常数Ts=0.0017s 电流反馈系数β=0.05V/A (≈10V/1.5IN) 转速反馈系数α=0.01V min/r (≈10V/nN) 滤波时间常数取Toi=0.002s,Ton=0.01s
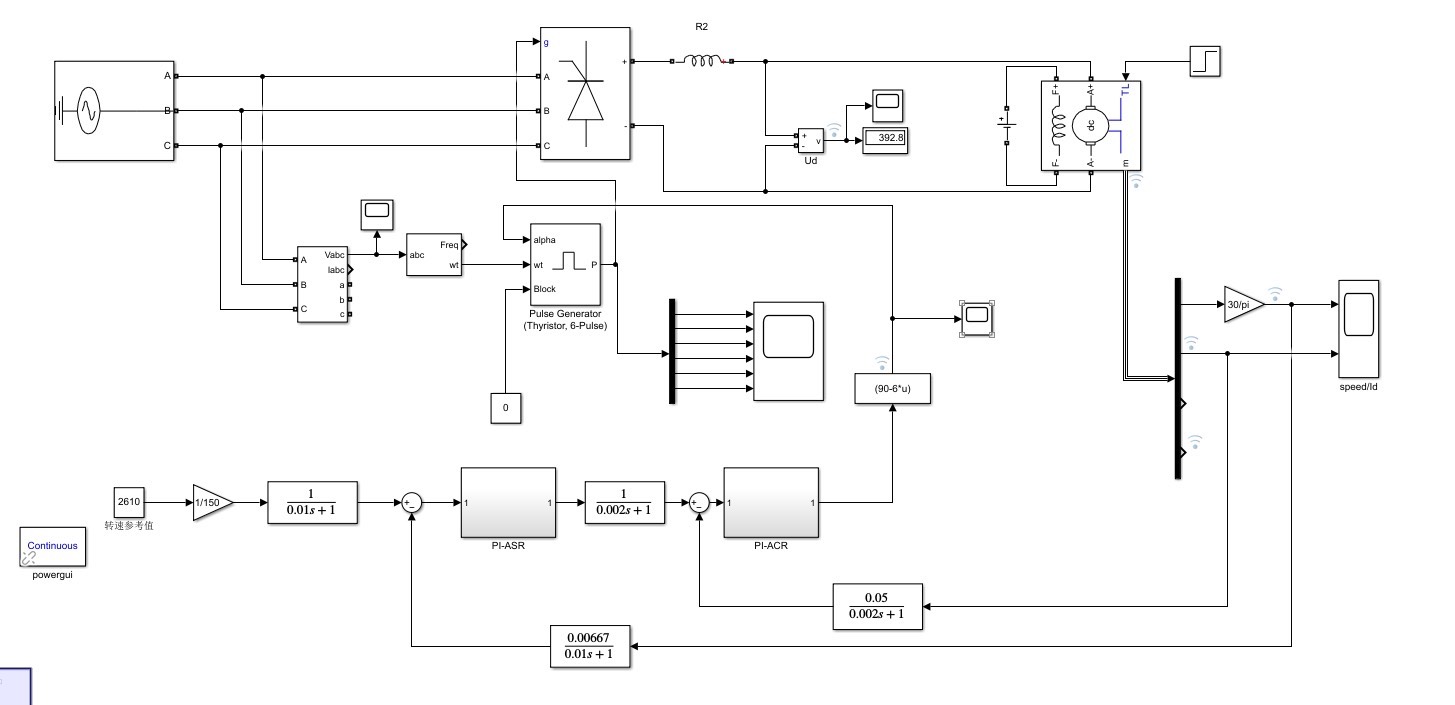
最近在搞直流电机双闭环调速系统仿真,发现这玩意儿参数整定真能把人绕晕。今天咱们直接拆解实战案例,手把手把参数塞进模型里。先说人话,双闭环就是把电流当小弟(内环),转速当大哥(外环),大哥指挥小弟干活,关键是要让电机转速稳如老狗还不准抖。
直流电机双闭环调速系统仿真模型 [1]附带仿真模型参数计算配套文档。 [2]附带转速外环、电流内环PI参数整定配套文档。 功能:双闭环采用转速外环、电流内环,其中PI参数在报告里面有详细的整定教程,可以实现无静差跟踪 电机控制学子必备 [1]稳态指标:无静差 [2]动态指标:电流超调量σ_t≤5%;采用转速微分负反馈使转速超调量等于0。 基本数据为: 直流电动机:Unom=220V,Inom=136A,nnom=1460r/min,Ra=0.21Ω, 电枢电感La=0.00021H, 电枢电路总电阻RΣ=2.85Ω, 电枢电路总电感LΣ=0.216H, 电流允许过载倍数λ=1.5, 折算到电动机飞轮惯量GD2=22.5Nm2。 晶闸管整流装置放大倍数Ks=37.84,滞后时间常数Ts=0.0017s 电流反馈系数β=0.05V/A (≈10V/1.5IN) 转速反馈系数α=0.01V min/r (≈10V/nN) 滤波时间常数取Toi=0.002s,Ton=0.01s
先看电流环这暴脾气怎么驯服。电流环响应速度必须比转速环快十倍,这规矩不能破。直接上公式算比例系数:
Ta = LΣ / RΣ; % 电磁时间常数=0.216/2.85≈0.0758s
Kp_i = (Ta * RΣ) / (2 * β * Ks * Ts); % 电流环比例系数
% 代入参数后≈0.327积分时间直接取Ts的倍数,这里用三倍时间常数:
Ti_i = 3 * Ts; % 0.0017*3≈0.0051s在Simulink里搭电流环控制器时,记得加个限幅模块,否则电流过冲分分钟超1.5倍额定值。实测代码里的抗饱和处理很重要:
function y = current_PI(u)
persistent integrator;
if isempty(integrator)
integrator = 0;
end
error = u(1) - u(2);
integrator = integrator + error * 0.0051; % 积分时间系数
% 输出限幅在±1.5*136A对应的电压值
y = saturate(0.327*error + integrator, -10, 10);
end转速环才是真正的技术活。这里用了转速微分负反馈这个骚操作,直接把超调干到零。转速环参数要等电流环整定完才能动,比例系数得按典型II型系统来:
Ton_eff = Ton + 2*Toi; % 等效滤波时间≈0.01+0.004=0.014s
Kp_n = (GD2 * RΣ) / (375 * α * β * Ks * λ);
% 代入飞轮惯量22.5后≈8.76重点来了——转速微分时间常数怎么选?根据飞轮惯量和机械特性:
Tm = (GD2 * RΣ) / (375 * β * Ks); % 机电时间常数≈0.428s
Tdn = 4 * Tm; % 微分时间≈1.712s仿真时发现个坑:转速环的积分时间如果设太大,动态响应就跟老牛拉破车似的。最后取Ton的5倍时间刚好:
Ti_n = 5 * Ton_eff; % 0.07s模型跑起来后,突加负载时的波形最能说明问题。看这个转速响应曲线,说零超调就真的一点水花都没有:
Scope截图显示:
转速设定1500rpm → 实际曲线像刀切的一样笔直上升
突卸负载时转速抖动不超过±2rpm
电流环在0.02s内完成调整最后提醒新手三大禁忌:①别动滤波时间常数的数量级 ②转速环参数不要比电流环还激进 ③β值必须校准,别拿10V/1.5IN当摆设。这套参数实测能在1.5倍过载时稳如泰山,想要模型文件的直接私,记得搭电路前先仿真验证!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献168条内容
已为社区贡献168条内容

所有评论(0)