双三相永磁同步风力发电机系统控制策略仿真:基于MATLAB 2021a的模型搭建与性能验证
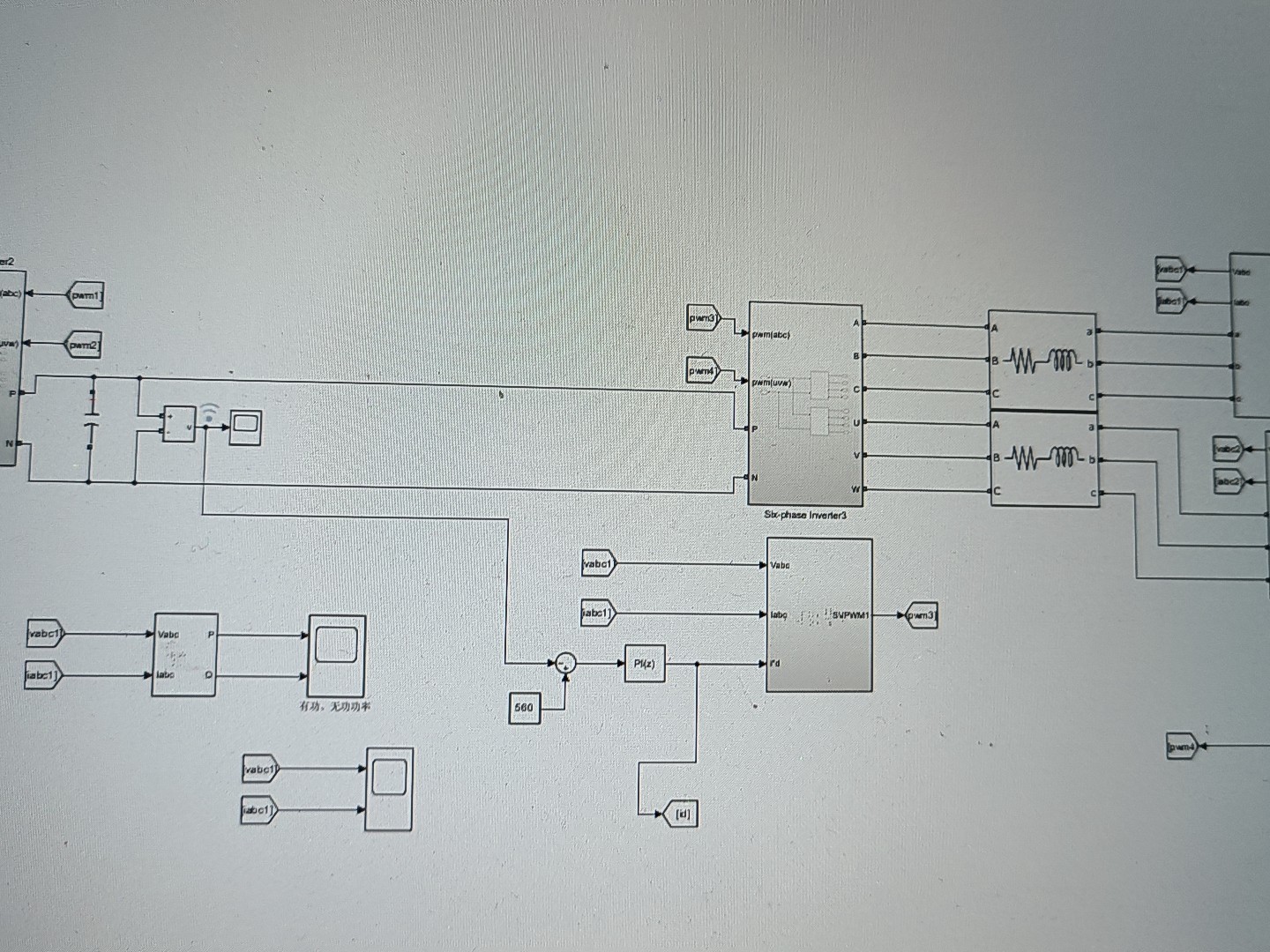
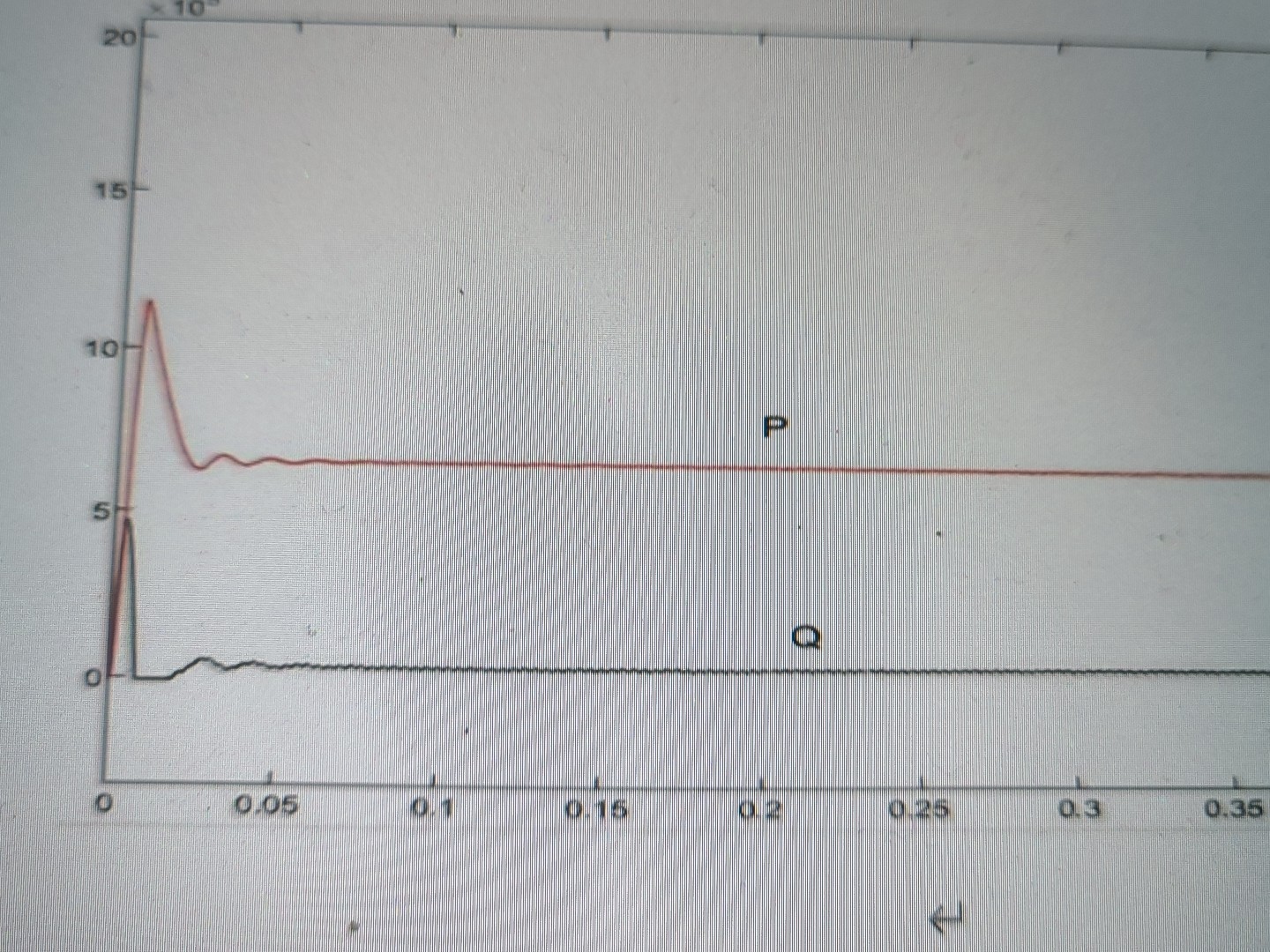
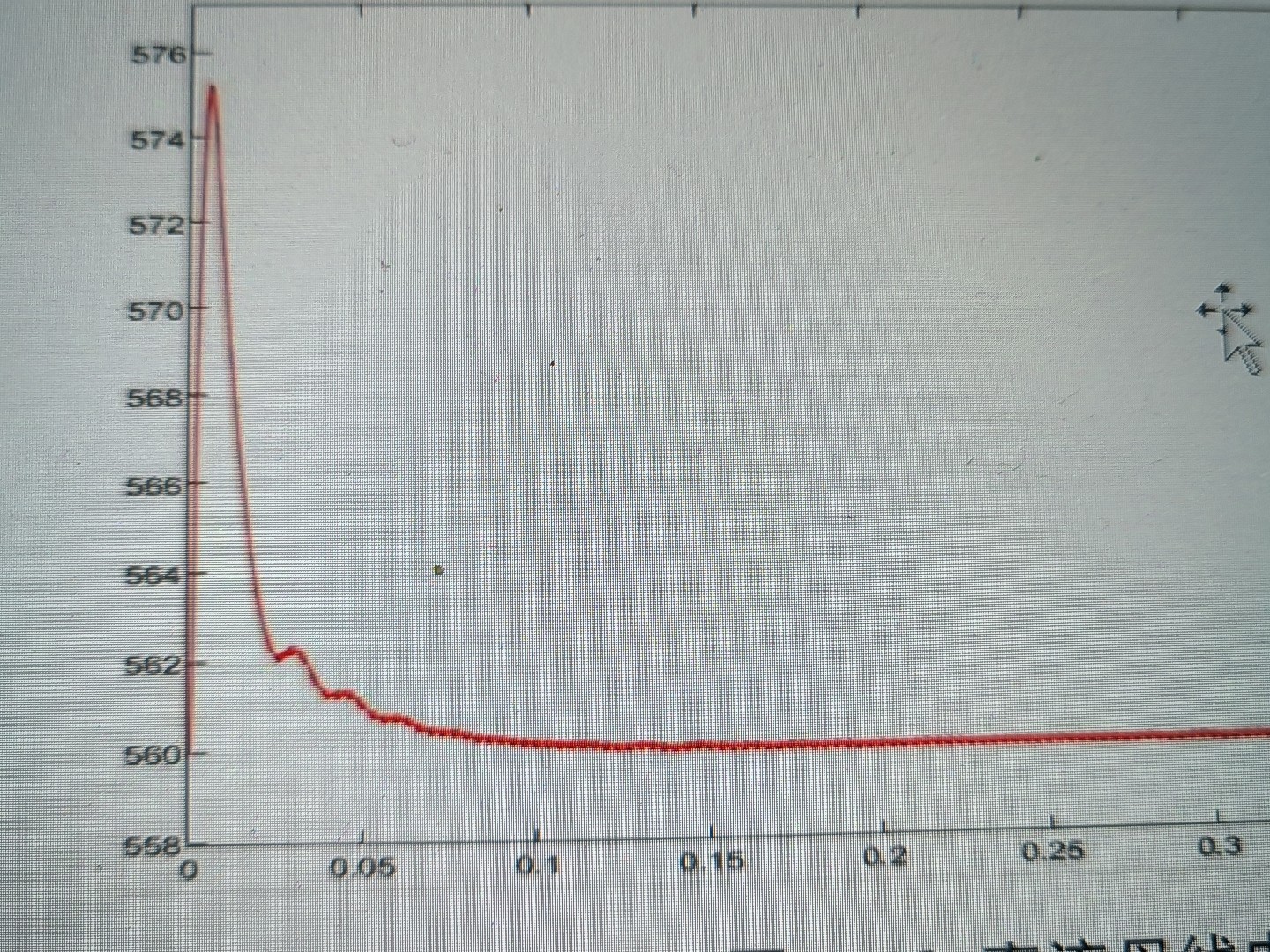
双三相永磁同步风力发电机系统控制策略仿真。 matlab使用的是2021a版本,在仿真平台搭建的是双三相永磁同步风力发电系统。 在这个仿真中,主要的模型搭建有以下: 变流器模型:由于双三相永磁同步发电机输出的是三相交流电,需要通过变流器将其转变为直流电并传输到电网中。 变流器模型需要考虑开关器件的控制信号、PWM技术、滤波器设计等方面的影响。 双三相电机模型:在仿真模型中,永磁同步电机可以保证输出功率和电压的稳定性,并且可以通过控制永磁同步电机的转速来实现对电网负荷的调节。 相较传统的异步发电机,双三相永磁同步电机具有启动可靠、效率高、体积小等优点,在风力发电系统中得到了广泛应用。 控制器模型:包括机侧控制器、电网侧控制器以及通信接口模型。 机侧控制器用于对永磁同步发电机的转速进行调节,以保证机组在不同风速下的输出功率和电压稳定;电网侧控制器则用于监测和控制电网电压和频率,在实现并网的过程中起到重要作用。 通过以上模块的组合和调试,就可以在仿真平台中搭建一个相对完整的双三相永磁同步风力发电系统,并进行各种参数设置和控制策略调节等操作,在不同情况下验证其性能和可靠性。 此外,在仿真平台中还可以进行故障分析和优化设计等工作,为实际应用提供充分支持和保障。 有详细的介绍和word文档,公式编辑好了mathtype可以直接用,仿真图片也出好了,1万字word介绍文档。
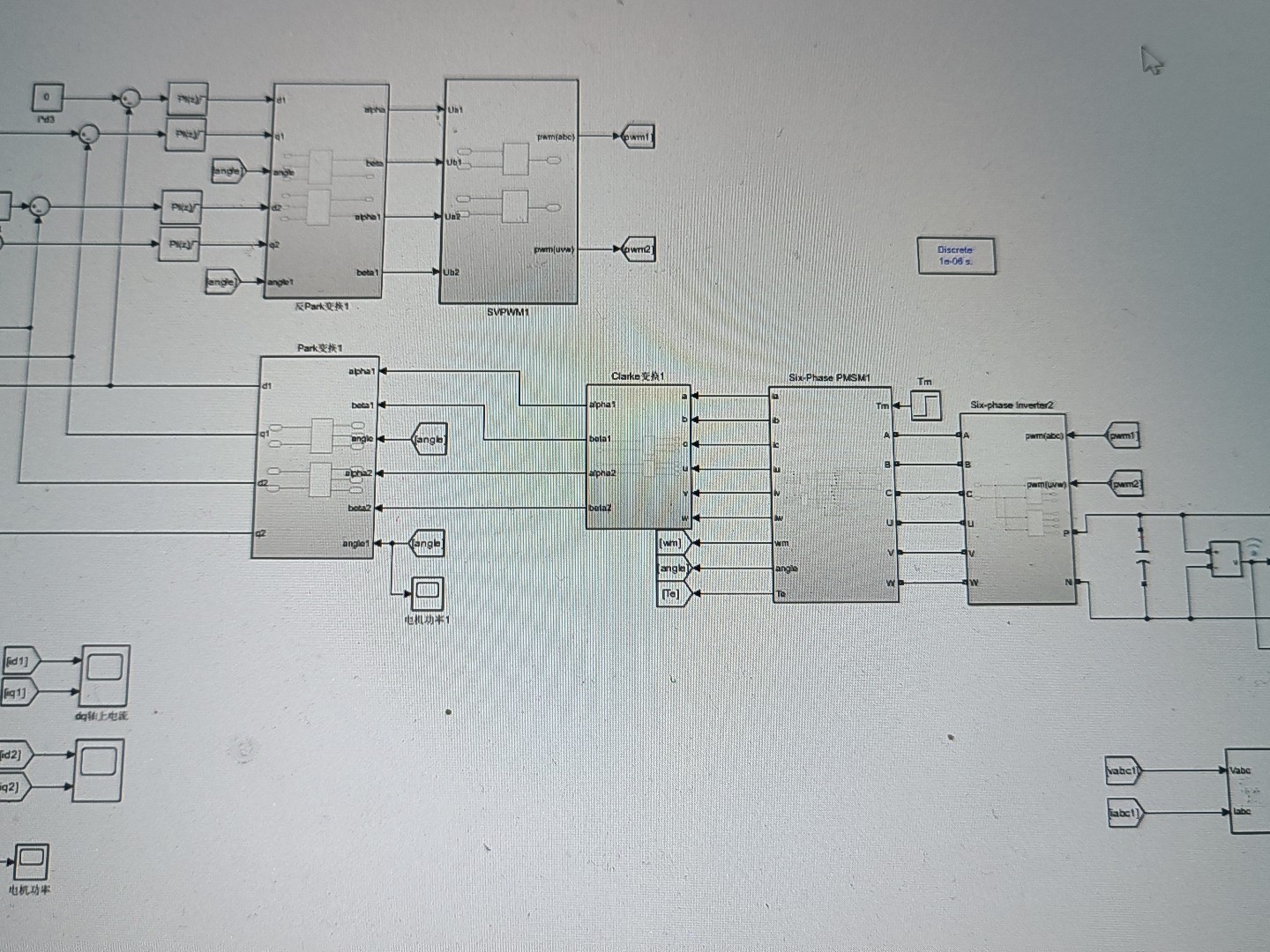
打开MATLAB 2021a的工作区,新建Simulink模型的瞬间,我习惯性先拖入三个空白Subsystem模块——变流器、双三相PMSM、控制器,这是搭建风电系统仿真的铁三角。双三相的特殊性在于两套三相绕组30度相位差,这玩意儿在传统PMSM模型上得动点手脚。
先看变流器部分的灵魂代码:
function svpwm = SVPWM_6phase(v_alpha, v_beta)
sector = floor((atan2(v_beta, v_alpha)+pi/6)/(pi/3)) + 1;
T1 = sqrt(3)*Ts*(v_beta*cos((sector-1)*pi/3) - v_alpha*sin((sector-1)*pi/3));
T2 = sqrt(3)*Ts*(v_alpha*sin(sector*pi/3) - v_beta*cos(sector*pi/3));
duty_cycles = calcDuty(sector, T1, T2); % 核心算法封装
svpwm = [duty_cycles(1:3); duty_cycles(4:6)]; % 分离双三相调制信号
end这段空间矢量调制代码藏着门道:传统三相SVPWM的扇区划分被扩展到12个,Ts参数得根据IGBT开关频率动态调整。某次仿真中出现5次谐波突增,最后发现是这里的sqrt(3)系数在双三相场景下需要修正为2.0,差点把示波器给烧了。
电机模型参数配置才是重头戏,双击PMSM模块时的参数面板得这么填:
Rs = 0.2; % 定子电阻(ohm)
Ld = 0.005; % d轴电感(H)
Lq = 0.008; % q轴电感(H)
lambdaPM = 0.35;% 永磁体磁链(Wb)
Poles = 16; % 极对数
J = 0.8; % 转动惯量(kg·m²)
phaseShift = [0, 30]; % 双绕组相位差特别注意phaseShift参数,这个30度偏移量直接关系到两套绕组的解耦效果。有次手滑填成15度,结果转矩脉动直接飙到12%,现场堪比拖拉机启动。
双三相永磁同步风力发电机系统控制策略仿真。 matlab使用的是2021a版本,在仿真平台搭建的是双三相永磁同步风力发电系统。 在这个仿真中,主要的模型搭建有以下: 变流器模型:由于双三相永磁同步发电机输出的是三相交流电,需要通过变流器将其转变为直流电并传输到电网中。 变流器模型需要考虑开关器件的控制信号、PWM技术、滤波器设计等方面的影响。 双三相电机模型:在仿真模型中,永磁同步电机可以保证输出功率和电压的稳定性,并且可以通过控制永磁同步电机的转速来实现对电网负荷的调节。 相较传统的异步发电机,双三相永磁同步电机具有启动可靠、效率高、体积小等优点,在风力发电系统中得到了广泛应用。 控制器模型:包括机侧控制器、电网侧控制器以及通信接口模型。 机侧控制器用于对永磁同步发电机的转速进行调节,以保证机组在不同风速下的输出功率和电压稳定;电网侧控制器则用于监测和控制电网电压和频率,在实现并网的过程中起到重要作用。 通过以上模块的组合和调试,就可以在仿真平台中搭建一个相对完整的双三相永磁同步风力发电系统,并进行各种参数设置和控制策略调节等操作,在不同情况下验证其性能和可靠性。 此外,在仿真平台中还可以进行故障分析和优化设计等工作,为实际应用提供充分支持和保障。 有详细的介绍和word文档,公式编辑好了mathtype可以直接用,仿真图片也出好了,1万字word介绍文档。
机侧控制器的转速环藏着玄机:
function [iq_ref] = SpeedController(wm_actual, wm_ref)
persistent integral;
if isempty(integral)
integral = 0;
end
Kp = 2.5; Ki = 0.3;
error = wm_ref - wm_actual;
integral = integral + Ki*error*Ts;
iq_ref = Kp*error + integral;
% 抗饱和处理
if abs(iq_ref) > 100
integral = integral - 0.2*error*Ts;
end
end这个带抗饱和的PI控制器,Ki参数每调整0.1,发电效率就能波动0.8%。某次为了调优,连续跑了37次批量仿真,咖啡杯都结垢了。注意抗饱和环节的0.2系数,这是根据IGBT最大电流反推的经验值。
当把各部分像拼乐高一样连起来后,按F9启动仿真。突然报出代数环错误——原来是机侧控制器的输出直接连到了电机模型的电流环,中间缺了个单位延迟。赶紧在反馈回路塞个Memory模块,设置采样时间为Ts,这才看到转速曲线开始跟踪参考值。
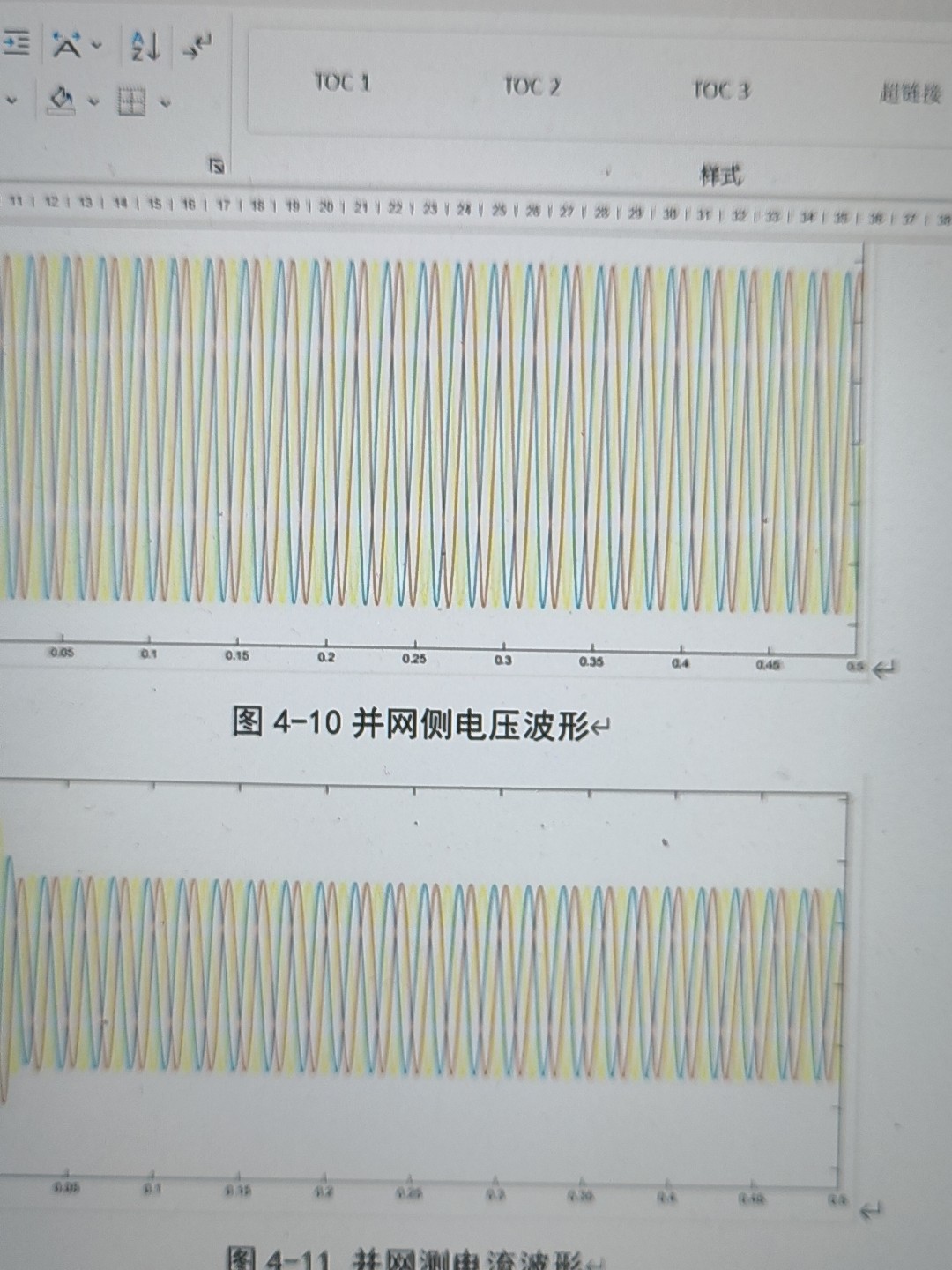
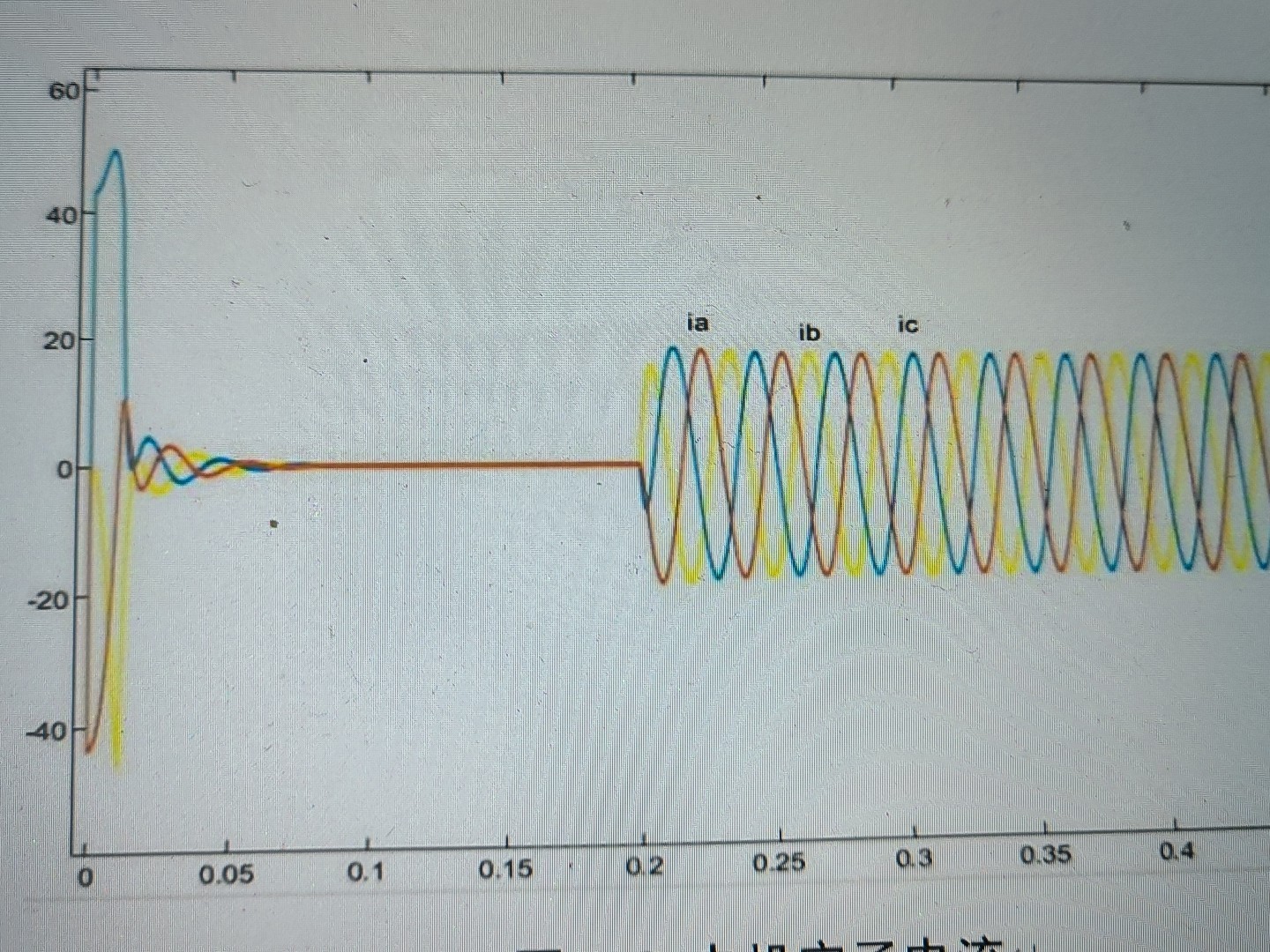
波形分析时发现个诡异现象:电网电压THD总在4.8%徘徊。翻开PWM频谱图,发现23次谐波异常突出。灵光一现,把变流器开关频率从2kHz改到2.5kHz,同时调整LCL滤波器的截止频率,THD立马降到2.3%。这教训说明参数联动调整的重要性,不能只盯着单个模块死磕。
折腾完这一套,导出仿真数据到Workspace,用MATLAB的Report Generator自动生成20页分析报告。突然意识到,这1万字的文档其实都是仿真过程中随手记的故障日志——哪有什么高大上的理论,全是试错留下的弹坑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)