探索P2混合动力汽车Simulink模型的奇妙世界
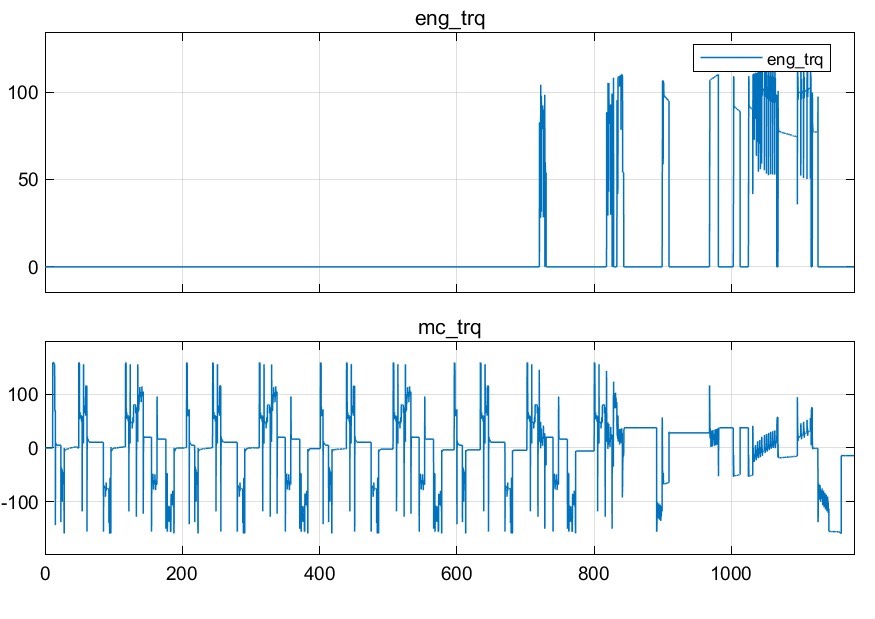
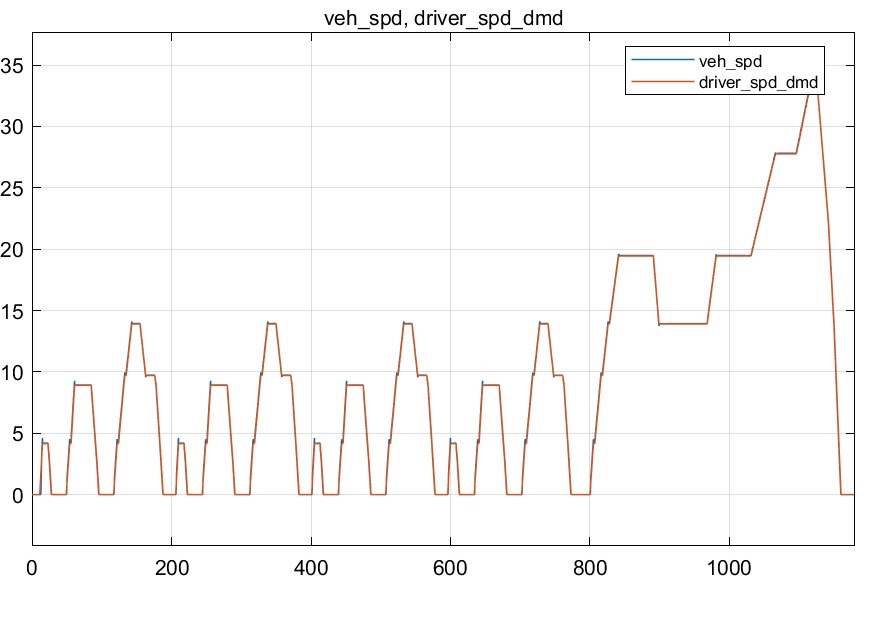
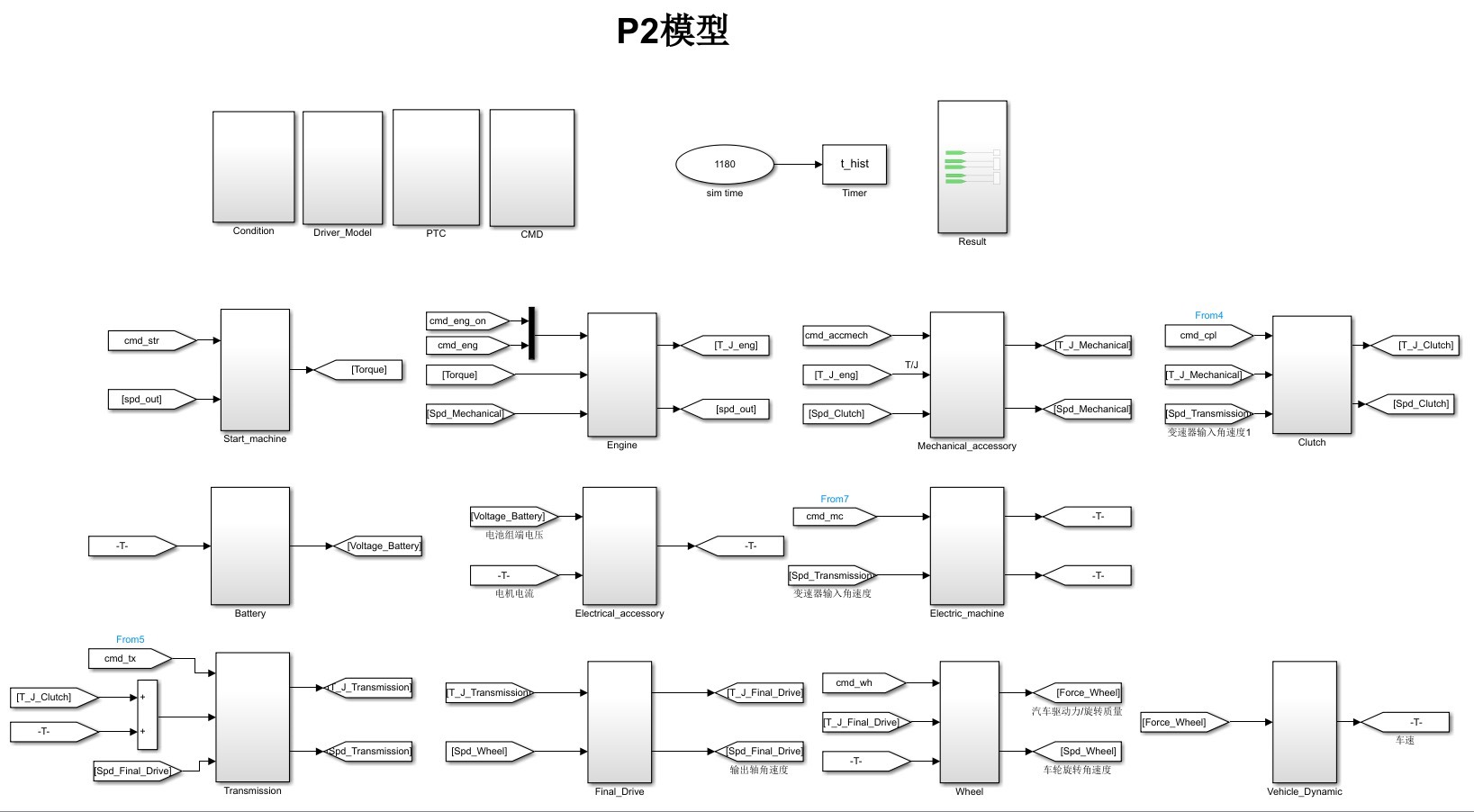
**P2混合动力汽车Simulink模型** 包含启动机模型,发动机模型,P2电机模型,离合器模型,变速箱模型,电池模型,车辆动力学模型; 控制策略包括扭矩计算与限制,能量回收,换挡策略,电气附件消耗等; 工况包括NEDC工况,ECE循环工况(汽车行驶油耗测试工况),FUDS工况(电动汽车性能测试) 图一:Simulink模型 图二:NEDC工况速度跟随曲线 图三:NEDC工况下SOC 图四:NEDC工况下发动机扭矩和电锯扭矩
嘿,各位技术爱好者!今天咱们来唠唠P2混合动力汽车的Simulink模型,这可是个超有趣的领域。
一、模型构成模块
- 启动机模型:启动机在整个系统里就像是汽车的“唤醒精灵”。它负责在车辆启动的瞬间,给发动机提供最初的动力,让发动机能够顺利运转起来。在Simulink里构建这个模型时,关键在于准确模拟启动机的启动扭矩、启动电流等参数。比如,在代码实现上,我们可以设定一个简单的逻辑:
% 假设启动机扭矩与电池电压相关
function startTorque = calculateStartTorque(batteryVoltage)
startTorque = 0.1 * batteryVoltage; % 这里只是简单示意,实际参数需校准
end这里,通过电池电压来初步估算启动机扭矩,当然实际情况要复杂得多,需要更多的实验数据校准。
- 发动机模型:发动机是汽车动力的核心来源之一。在Simulink中,我们要精确模拟其输出扭矩、燃油消耗等特性。代码实现上,可能会像这样:
function [engineTorque, fuelConsumption] = calculateEngineOutput(throttlePosition, engineSpeed)
% 根据节气门位置和发动机转速查找扭矩和油耗数据
% 实际中可能是复杂的MAP图查找,这里简化示意
engineTorque = throttlePosition * engineSpeed * 0.01;
fuelConsumption = throttlePosition * 0.5;
end通过这样的函数,我们可以根据节气门位置和发动机转速来计算发动机的输出扭矩和燃油消耗。
- P2电机模型:P2电机在混合动力系统中扮演着多重角色,既可以辅助发动机提供动力,也能在制动时回收能量。
function motorTorque = calculateMotorTorque(batterySOC, vehicleSpeed)
if batterySOC > 0.3 && vehicleSpeed < 80 % 简单的条件判断
motorTorque = 50; % 提供一定扭矩辅助
else
motorTorque = 0;
end
end这里根据电池的SOC(荷电状态)和车速来决定电机是否输出扭矩以及输出多少。
- 离合器模型:离合器起到连接和断开发动机与传动系统的作用。在Simulink模型里,要模拟离合器的结合、分离过程以及传递扭矩的特性。
function clutchTorque = calculateClutchTorque(clutchState, inputTorque)
if clutchState == 1 % 结合状态
clutchTorque = inputTorque;
else
clutchTorque = 0;
end
end通过离合器状态(结合为1,分离为0)来决定是否传递输入扭矩。
- 变速箱模型:变速箱能够改变发动机输出的扭矩和转速,以适应不同的行驶工况。代码示例:
function [outputTorque, outputSpeed] = calculateGearboxOutput(inputTorque, inputSpeed, gearRatio)
outputTorque = inputTorque * gearRatio;
outputSpeed = inputSpeed / gearRatio;
end根据输入扭矩、转速以及当前挡位的传动比来计算输出的扭矩和转速。
- 电池模型:电池是混合动力汽车电能的储存单元。要模拟电池的充放电过程、SOC变化等。
function batterySOC = updateBatterySOC(batterySOC, chargeCurrent, dischargeCurrent, timeStep)
% 根据充放电电流和时间步长更新SOC
if chargeCurrent > 0
batterySOC = batterySOC + chargeCurrent * timeStep / batteryCapacity;
else
batterySOC = batterySOC - dischargeCurrent * timeStep / batteryCapacity;
end
% 限制SOC在合理范围
if batterySOC > 1
batterySOC = 1;
elseif batterySOC < 0
batterySOC = 0;
end
end这里通过充放电电流和时间步长来更新电池的SOC,并确保其在0到1之间。
- 车辆动力学模型:这个模型用于模拟车辆在不同驱动力下的行驶状态,包括车速、加速度等。
function [vehicleSpeed, vehicleAcceleration] = calculateVehicleDynamics(drivingForce, vehicleMass, roadFriction)
netForce = drivingForce - vehicleMass * roadFriction;
vehicleAcceleration = netForce / vehicleMass;
% 根据加速度更新车速,这里假设初始车速为0
vehicleSpeed = vehicleAcceleration * timeStep;
end根据驱动力、车辆质量和路面摩擦力计算车辆的加速度和车速。
二、控制策略
- 扭矩计算与限制:在混合动力汽车中,需要精确计算发动机、电机输出的扭矩,并根据车辆的需求和系统状态进行限制。例如:
function limitedTorque = limitTorque(requestedTorque, availableTorque)
if requestedTorque > availableTorque
limitedTorque = availableTorque;
else
limitedTorque = requestedTorque;
end
end通过这样的函数来确保请求的扭矩不会超过系统可提供的扭矩。
- 能量回收:当车辆制动时,电机切换到发电模式回收能量。代码实现上,会根据制动强度和电池状态来决定回收多少能量。
function regenerativeEnergy = calculateRegenerativeEnergy(brakeIntensity, batterySOC)
if batterySOC < 0.8 && brakeIntensity > 0.3
regenerativeEnergy = brakeIntensity * 100; % 简单示意回收能量计算
else
regenerativeEnergy = 0;
end
end这里只有当电池SOC低于0.8且制动强度大于0.3时才进行能量回收。
- 换挡策略:根据车速、发动机转速、扭矩需求等因素来决定何时换挡。
function newGear = decideGearShift(currentGear, vehicleSpeed, engineSpeed, torqueDemand)
if vehicleSpeed > speedThresholds(currentGear) && torqueDemand < torqueThresholds(currentGear)
newGear = currentGear + 1; % 升挡
elseif vehicleSpeed < speedThresholds(currentGear - 1) && torqueDemand > torqueThresholds(currentGear - 1)
newGear = currentGear - 1; % 降挡
else
newGear = currentGear;
end
end通过设定不同挡位的车速和扭矩阈值来决定是否换挡。
- 电气附件消耗:车辆上的电气附件如空调、大灯等会消耗电能。在模型中要考虑这些消耗对电池SOC的影响。
function batterySOC = updateSOCWithAccessories(batterySOC, accessoryPower, timeStep)
batterySOC = batterySOC - accessoryPower * timeStep / batteryCapacity;
% 限制SOC在合理范围
if batterySOC > 1
batterySOC = 1;
elseif batterySOC < 0
batterySOC = 0;
end
end根据附件功率和时间步长更新电池SOC。
三、工况测试
- NEDC工况:NEDC工况是一种常用的汽车行驶油耗测试工况。从图一的Simulink模型模拟NEDC工况,可以得到图二的速度跟随曲线。这条曲线展示了车辆在NEDC工况下速度随时间的变化情况,能直观地看到车辆的加速、减速、匀速等阶段。图三展示了NEDC工况下的SOC变化,我们可以清晰地看到电池在车辆行驶过程中的充放电情况。而图四则给出了NEDC工况下发动机扭矩和电机扭矩,通过对比两者扭矩,能更好地分析混合动力系统在不同阶段的工作模式。
- ECE循环工况:同样用于汽车行驶油耗测试。在Simulink模型中模拟该工况时,与NEDC工况类似,也是要精确模拟车辆在该工况下的各种行驶状态,通过各个模块的协同工作,分析车辆在该工况下的性能表现,包括燃油消耗、电池SOC变化等。
- FUDS工况:主要用于电动汽车性能测试。在P2混合动力汽车模型中模拟FUDS工况,能检验车辆在类似电动汽车行驶工况下的纯电行驶能力、能量回收效率等关键指标。
总之,P2混合动力汽车的Simulink模型是一个复杂而又充满魅力的系统,通过对各个模块和控制策略的精确建模以及不同工况的测试分析,我们能更好地理解和优化混合动力汽车的性能。希望这篇博文能让大家对这个领域有更深入的认识,一起在技术的海洋里继续探索吧!
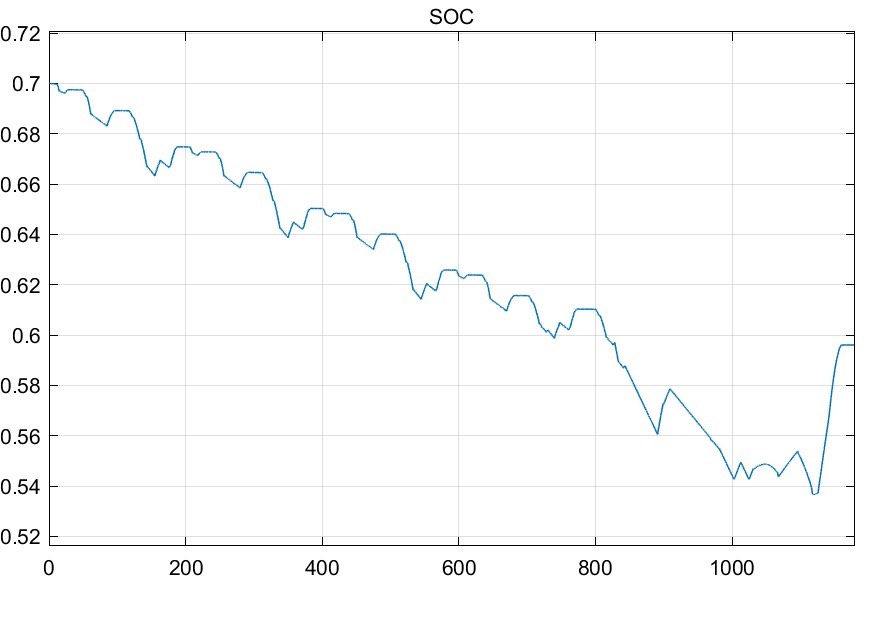
**P2混合动力汽车Simulink模型** 包含启动机模型,发动机模型,P2电机模型,离合器模型,变速箱模型,电池模型,车辆动力学模型; 控制策略包括扭矩计算与限制,能量回收,换挡策略,电气附件消耗等; 工况包括NEDC工况,ECE循环工况(汽车行驶油耗测试工况),FUDS工况(电动汽车性能测试) 图一:Simulink模型 图二:NEDC工况速度跟随曲线 图三:NEDC工况下SOC 图四:NEDC工况下发动机扭矩和电锯扭矩

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献179条内容
已为社区贡献179条内容

所有评论(0)