基于滑膜控制扰动观测器的永磁同步电机PMSM模型:四种控制策略大比拼
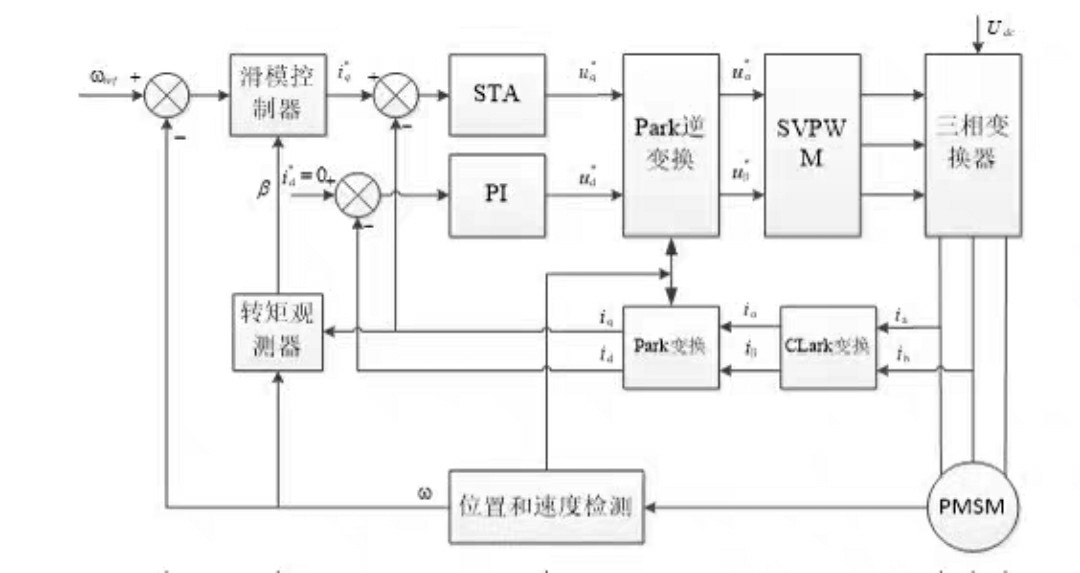
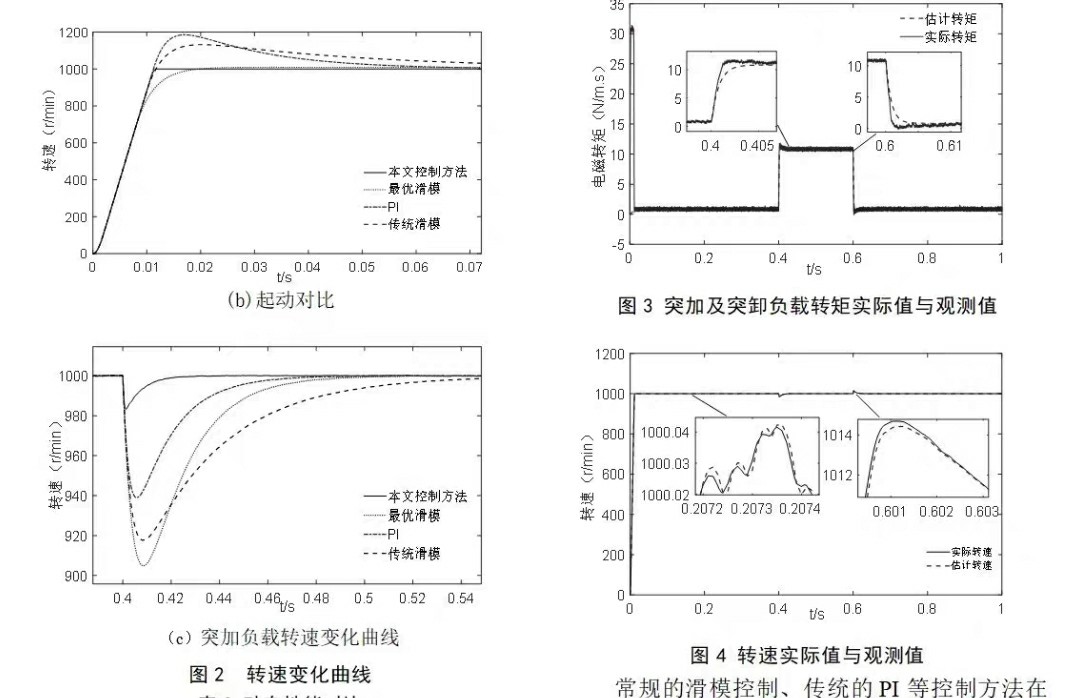
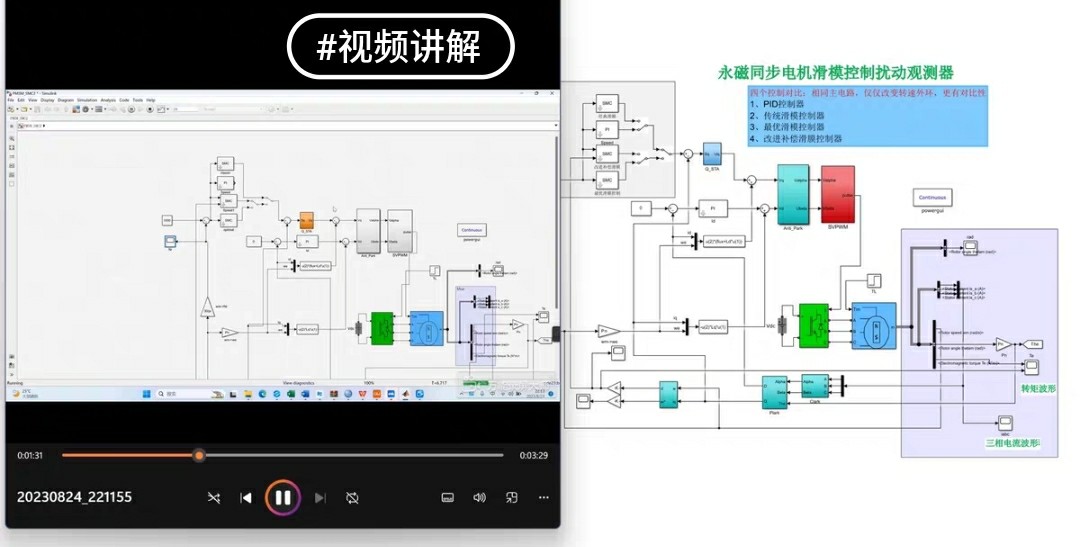
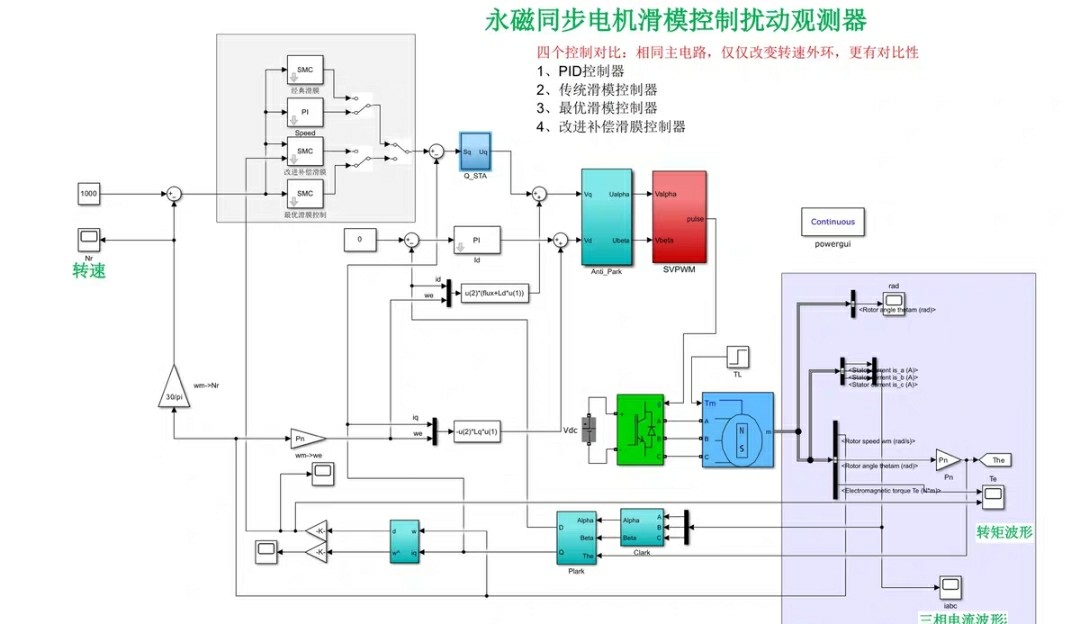
(67)基于滑膜控制扰动观测器的永磁同步电机PMSM模型 四个控制对比: 1、PID控制器 2、传统滑模控制器 3、最优滑模控制器 4、改进补偿滑膜控制器 [1]附带简单讲解视频 如下图 [2]附带出图四个控制对比的说明文档
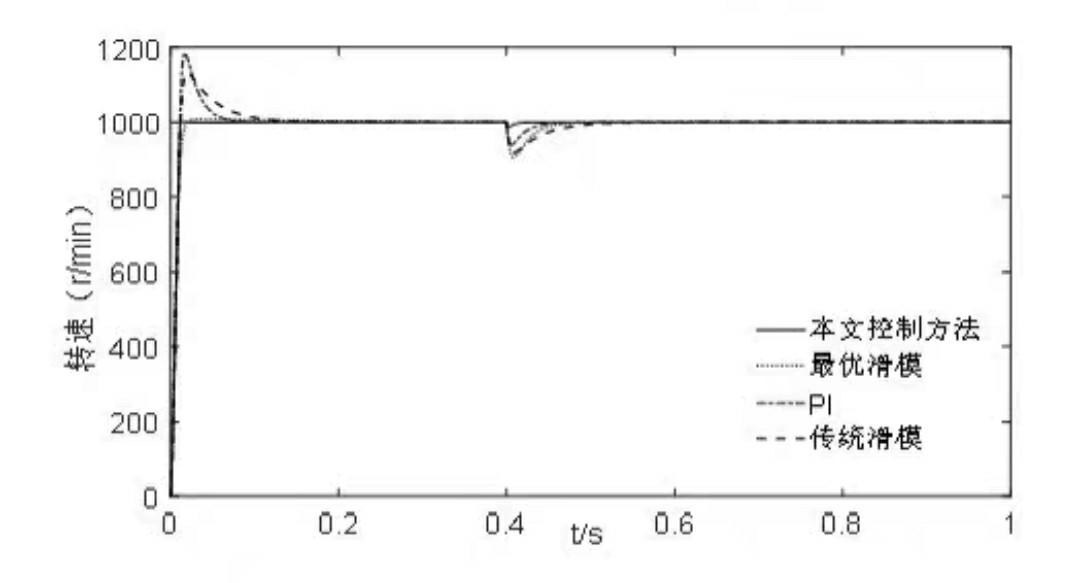
在永磁同步电机(PMSM)的控制领域,不断探索更优的控制策略一直是研究热点。今天咱就来唠唠基于滑膜控制扰动观测器的PMSM模型下的四种控制策略:PID控制器、传统滑模控制器、最优滑模控制器以及改进补偿滑膜控制器。
PID控制器
PID控制器算是控制领域的元老了,简单又实用。它根据设定值与实际输出值之间的误差,通过比例(P)、积分(I)、微分(D)三个环节的线性组合来调整控制量。
下面来段简单的Python代码实现一个简易的PID控制器:
class PID:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.prev_error = 0
self.integral = 0
def update(self, setpoint, process_variable):
error = setpoint - process_variable
p_term = self.kp * error
self.integral += error
i_term = self.ki * error
d_term = self.kd * (error - self.prev_error)
self.prev_error = error
output = p_term + i_term + d_term
return output分析一下这段代码,PID类初始化时接收比例系数kp、积分系数ki和微分系数kd。update方法则根据当前的设定值setpoint和实际输出值processvariable计算误差,然后分别算出比例项pterm、积分项iterm和微分项dterm,最后三者相加得到控制输出output。在PMSM控制里,这个output可能就用来调整电机的电压或者电流啥的。
传统滑模控制器
传统滑模控制器的思路有点意思,它让系统的状态在特定的“滑模面”上滑动,从而达到控制目的。这种控制器对系统的参数变化和外部干扰有一定的鲁棒性。
简单的滑模控制代码示例(这里以MATLAB为例):
% 假设系统参数
m = 1; % 质量
b = 0.1; % 阻尼系数
k = 1; % 刚度系数
% 滑模控制参数
kp = 10;
kd = 2;
% 仿真时间
tspan = 0:0.01:10;
% 初始条件
x0 = [0; 0];
% 定义ODE方程
odefun = @(t, x) [x(2); (1/m)*(-b*x(2)-k*x(1)+kp*sign(x(1))+kd*x(2))];
% 求解ODE
[t, x] = ode45(odefun, tspan, x0);在这段MATLAB代码里,首先设定了系统的一些参数,如质量m、阻尼系数b和刚度系数k,还有滑模控制相关的参数kp和kd。然后通过定义ODE方程,这里面利用了滑模控制的切换函数sign(x(1)),来模拟系统状态的变化。最后用ode45函数求解这个ODE方程,得到系统状态随时间的变化。在PMSM中,类似的思路可以用来控制电机的转速或者转矩。
最优滑模控制器
最优滑模控制器是在传统滑模控制器基础上的升级,它通过优化滑模面或者控制律,使得系统能达到更好的性能指标,比如更快的响应速度、更小的超调量等。
(67)基于滑膜控制扰动观测器的永磁同步电机PMSM模型 四个控制对比: 1、PID控制器 2、传统滑模控制器 3、最优滑模控制器 4、改进补偿滑膜控制器 [1]附带简单讲解视频 如下图 [2]附带出图四个控制对比的说明文档
实现最优滑模控制器会复杂一些,涉及到更多的数学推导和参数优化。这里简单示意一下优化滑模面的思路,假设我们通过某种优化算法(比如遗传算法)来寻找最优的滑模面系数。
import numpy as np
from scipy.optimize import minimize
# 假设系统状态方程和性能指标函数
def system_dynamics(x, u):
# 这里简单示意,实际PMSM会复杂很多
A = np.array([[0, 1], [-1, -1]])
B = np.array([[0], [1]])
return A.dot(x) + B.dot(u)
def performance_index(x, u):
# 简单的二次型性能指标
Q = np.diag([1, 1])
R = np.array([[1]])
return x.T.dot(Q).dot(x) + u.T.dot(R).dot(u)
# 定义优化目标函数
def objective(parameters):
k1, k2 = parameters
def sliding_surface(x):
return k1 * x[0] + k2 * x[1]
total_cost = 0
x = np.array([0, 0]) # 初始状态
for _ in range(100): # 模拟一段时间
u = -np.sign(sliding_surface(x)) # 简单滑模控制律
x = system_dynamics(x, u)
total_cost += performance_index(x, u)
return total_cost
# 初始猜测值
initial_guess = [1, 1]
# 进行优化
result = minimize(objective, initial_guess)
optimal_k1, optimal_k2 = result.x这段Python代码里,首先定义了系统动力学方程systemdynamics和性能指标函数performanceindex。然后objective函数通过遍历一段时间内系统状态,计算总的性能指标。最后利用scipy库的minimize函数来寻找使性能指标最小的滑模面系数k1和k2。在实际PMSM控制中,这个过程会根据电机的具体模型和控制要求来调整。
改进补偿滑膜控制器
改进补偿滑膜控制器则是进一步考虑了系统中存在的一些未建模动态和扰动,通过增加补偿环节来提高控制精度。
比如我们可以在传统滑模控制器的基础上,添加一个扰动观测器来估计并补偿扰动。
% 假设系统参数
m = 1; % 质量
b = 0.1; % 阻尼系数
k = 1; % 刚度系数
% 滑模控制参数
kp = 10;
kd = 2;
% 扰动观测器参数
lambda_obs = 10;
% 仿真时间
tspan = 0:0.01:10;
% 初始条件
x0 = [0; 0];
z0 = 0; % 扰动观测器初始状态
% 定义ODE方程
odefun = @(t, vars) [vars(2); (1/m)*(-b*vars(2)-k*vars(1)+kp*sign(vars(1))+kd*vars(2)+z0); lambda_obs*(vars(1)-z0)];
% 求解ODE
[t, vars] = ode45(odefun, tspan, [x0; z0]);在这段MATLAB代码里,除了滑模控制相关参数,还设定了扰动观测器参数lambdaobs。ODE方程里新增了扰动观测器的动态方程lambdaobs*(vars(1)-z0),这里vars(1)是系统的某个状态,z0是扰动观测值。通过这个方程不断更新扰动观测值,然后在控制项里加入这个观测到的扰动补偿,从而提高系统的控制性能。
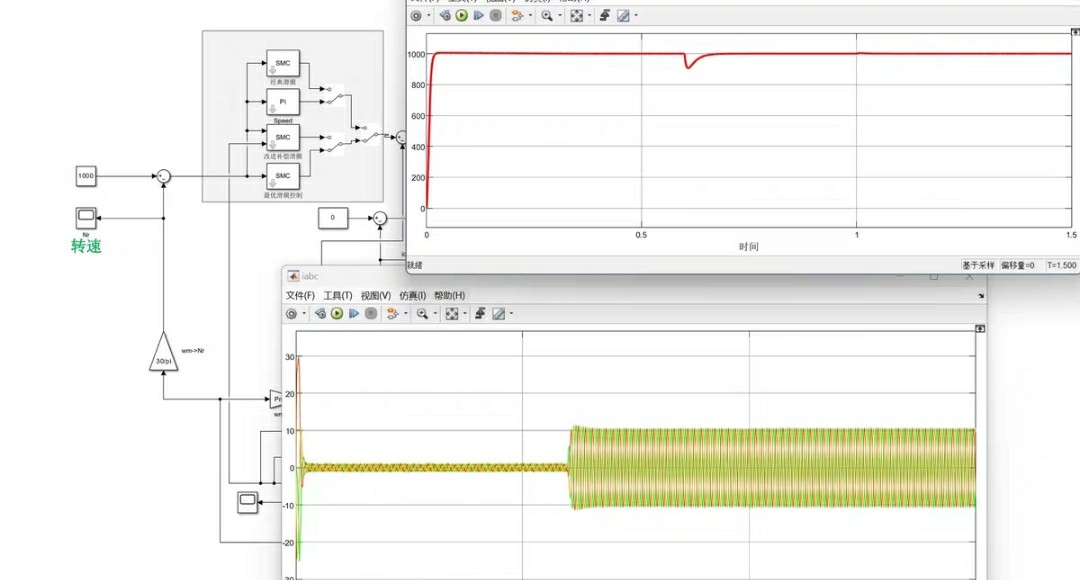
最后,附上[1]简单讲解视频以及[2]出图四个控制对比的说明文档,能让大家更直观地感受这四种控制策略在PMSM模型中的表现差异。感兴趣的小伙伴可以深入研究研究,说不定能在实际项目中找到更合适的控制方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献60条内容
已为社区贡献60条内容

所有评论(0)