从酒店到客厅,优理奇机器人开始啃家居场景这块最难的骨头
春晚后,具身领域发生了一个很大的转变:开始关注落地和场景了。
宇树在春晚舞台把“机器人身体能力天花板”推到了大众面前,智元则慢慢把机器人往明确的 B 端场景里落,Sharpa 在补“手和触觉”这块关键技术,国外的Figure AI 和physcial intelligence也在不断让真实部署成为可能。
这一次,也是行业几年的发展和不断摸索积累的成果。
再把这些内容结合到一起,可以发现一个很明显的现象:相比于demo下的“全能选手”,行业正在谋求具身为各类生产力带来新的增长。
进工厂和酒店也好,进家庭也罢,当下B 端和 C 端的需求都在变得越来越具体。头部公司和行业重心的变化,也非常微妙:
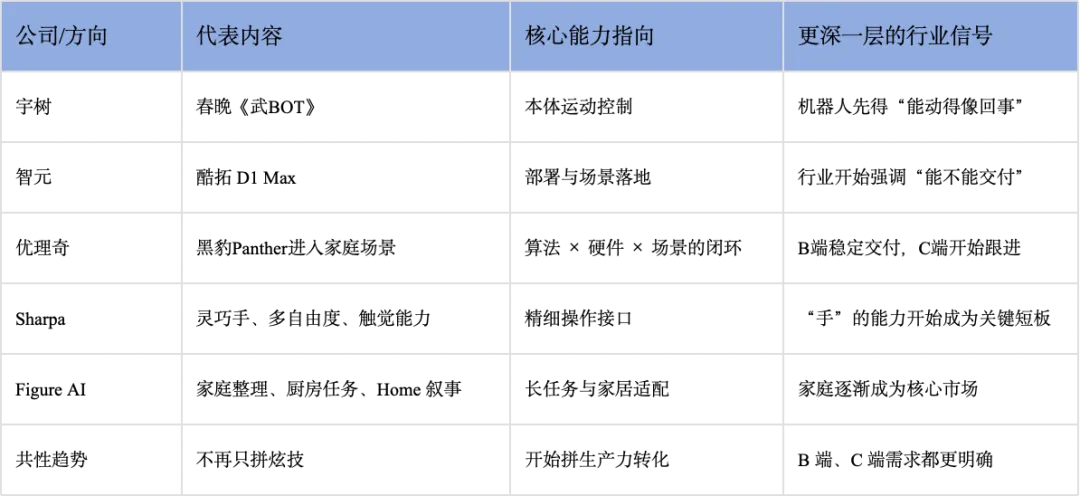
而家居场景,这个拥有无限想象空间和可能的落地点,也最有可能率先落地的板块,正在被国内外优秀的团队努力攻克。
近日,来自苏州的具身的独角兽unix ai发布了黑豹系列产品Panther在家庭场景中工作的视频。视频里不是展台、不是实验室,而是一整套生活流任务:厨房备餐、门口递包、客厅整理、阳台挂衣。它正在回答的,不是“会不会某个动作”,而是“机器人到底能不能像一个真正的人工作”。
看完视频后,有一种很兴奋的感觉。不是因为它做了一个更炸裂的动作,而是更加融入人类生活了。
01. 家庭场景,才是机器人最难“作弊”的一关
Case最不可控,极致要求安全的落地场景之一,就是家居。
很简单,这里可能有婴儿、孩子、病号和老人,要求机器人不仅仅是个保姆,还需要是个暖男。
除此之外,还非常“不可控”。
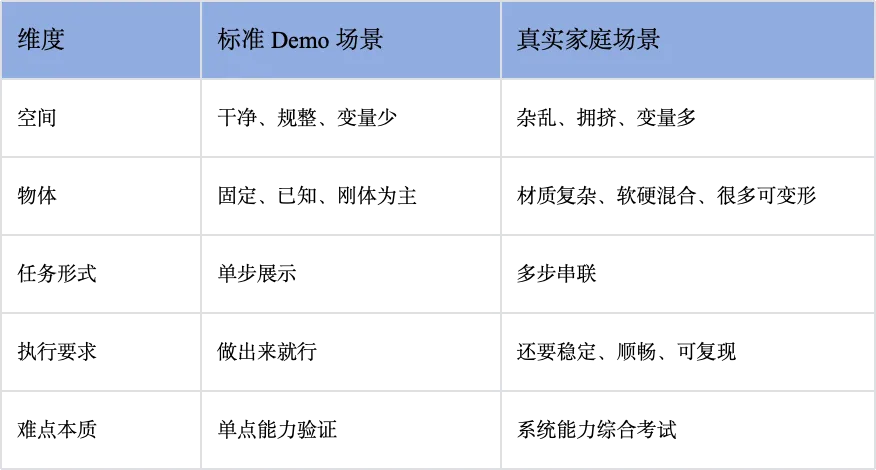
家庭既不是工作站,也不是工位,更不是一段被清空、被规整、被定义好的演示环境。

这里有玻璃器皿、皱巴巴的衣服、散落的玩具、塑料袋、毛巾、背包,也有窄路径、杂乱摆放、人机交接和跨空间切换。
有挑战的不是某个case,而是整个空间下的每个动作。
如果参考人类的动作,相比于human的百万年进化,机器人已经在变聪明的路上走了很多捷径。
家居任务并不简单,特别是对没有生活经验的machines来说:“做饭不是翻一下锅,整理不是抓一下东西,挂衣服也不是把布料提起来就结束”。
真正的家庭任务,考验的是连续感知、连续判断、连续执行和连续纠错。它要求机器人不只是“会”,还得“顺”。
说白了,本质上是大脑对物理常识的理解和因果关系的认知。
所以,家庭场景最难的地方,从来不是“会不会一个动作”,而是“能不能在真实生活里把事情接住”。
而这,恰恰也是最难伪装的能力。
02. 从世界冠军到工程交付的“破局”
去年,优理奇在世界人形机器人运动会上拿下酒店场景清洁服务赛冠军。此后,它在 B 端场景里的交付一路往前推,到去年年底,已经做到了稳定月交付百台。
但这次家居视频的展示不是对外公布“已经开始讲家庭故事了”,而是在表明自己坚持走的是一条非常工程化、商业化的路线:
先在准消费场景的B 端把活练熟,再往家庭的 C 端迁移。

同一套机器人平台,一边打酒店,一边打家庭;同一套底层能力,一边解决客房服务,一边解决生活服务。
这套方法论背后最聪明的地方在于,它不是赌“家庭会一夜之间成熟”,而是先去找一个更容易形成闭环的地方。在酒店里把清洁、整理、收纳、搬运、接待这些能力做扎实,再把这些能力慢慢迁移到家庭、养老、餐饮这些更复杂、但也更大的场景里。
03. 机器人真正融入“生活”的时候,价值更突出了
很多机器人对外的demo,都有一个相似的问题:太像证明题了。
给你一个镜头,证明能做,然后结束,留下了“无限的想象空间”。
unix ai 展示的并不是机器人完成了了一个多难的动作,而在于它拍出来的,是一种完整的生活质感。

厨房、餐桌、门厅、客厅、阳台;锅铲、碗盘、蔬菜、背包、桌面杂物、衣物;硬物、软物、可变形物、人机交接、空间切换、任务衔接。
这些东西都不新鲜。但正因为不新鲜,像人一样干活才最有价值。因为真正能把机器人送进家庭的,从来不是“最震撼的一下”,而是“最日常的一串”。
Unix AI在给大家传达的是:“它在拿生活本身,给自己的机器人做考试”。
当机器人不再只是会动、会演、会展示,而是开始进入生活、承担琐碎、接住日常,它的商业价值和产业意义,才会进一步被放大。
04. 三位一体,这条路是对的,也是最工程的
Unix AI这条技术路径能成立,不只是因为它找对了场景。
更关键的是,它没有把希望压在某一个大力出奇迹模型上,而是搭了一整套能够闭环的系统能力:算法 × 硬件 × 场景,缺了任何一环,都会左右掣肘。
落到算法层,核心可以浓缩成优理奇自研的“算法铁三角”:UniFlex提学习效率,UniTouch补多模态接触能力,UniCortex管长任务流程。
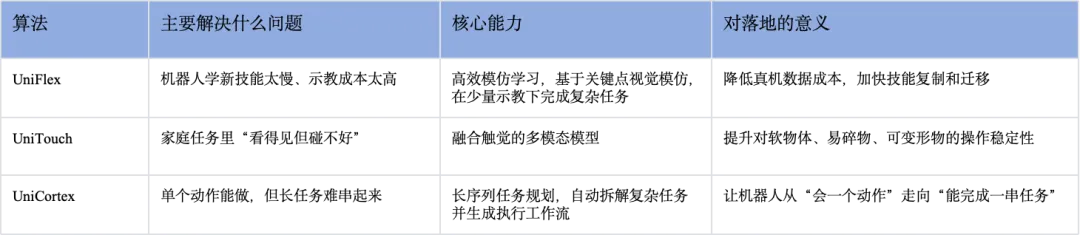
这套“算法铁三角”背后,其实对应的是今天具身落地最现实的约束:数据贵,就先提升学习效率;精细操作难,就做多模态融合;全任务太复杂,就先把长流程拆开。
这未必是最浪漫的路线,但很可能是当下最对、也最工程化的一条路。
所以,优理奇一边把 Panther 放进家居和酒店这样的双场景路线里,一边开始稳定批量交付,正在走进办公、家庭、教育等真实空间。再叠加它在世界人形机器人运动会酒店相关赛项里拿到两金一银,其实已经把“场景—数据—产品”这三个东西拧到了一起。其他团队可能在证明“机器人到底有多强”,Unix AI和Panther则在展示“机器人什么时候开始有用”。
05. 真正的临界点,是机器人开始接班了
机器人行业真正的临界点,其实不是某个动作更炸了,也不是某个能力更强了。
真正的临界点,是机器人开始接班了。
那些人类最熟、最烦、最碎、最容易被忽视,但又每天都得做的事。做饭前的准备、桌面上的归位、出门前的递送、阳台上的晾晒。
生活里那些不伟大,但特别占用时间的琐事。一旦机器人开始接这些活,行业的意义就变了。它不再只是一个“很像未来”的东西,而是开始变成一个能分担现实的东西。
更是在告诉你:机器人开始学着接管生活里的“琐碎”了。
而这,才是具身智能真正发力的开始!

重磅!
VLA+RL方向首个系统教程来啦!Online RL/Offline RL/test time RL等~
推荐阅读
我们用低成本的机械臂完成pi0/pi0.5/GR00T/世界模型等VLA任务~
VLA/VLA+触觉/VLA+RL/具身世界模型等!具身大脑+小脑算法与实战全栈路线来啦~
Diffusion Policy在具身智能领域是怎么应用的?为什么如此重要?
1v1 科研论文辅导来啦!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)