Sentinel-1 GRD 几何定位计算详解
一套工程可直接实现、完全对应哨兵1号 GRD 产品、从像素(x,y)→经纬度(lon,lat)的标准解法 + 计算公式 + 实现步骤,欧空局Sentinel-1官方定的几何模型,你拿到姿态、轨道、产品XML/标注文件就能直接编码计算。
已知:GRD图像像素坐标(X,Y) + 卫星星历/姿态 + 产品辅助数据 → 求(WGS84经纬度/大地坐标)。
一、先明确:哨兵1号 GRDH 是什么几何投影
Sentinel-1 Level-1 GRD(含GRDH)是:
- Ground Range,地距投影
- 零多普勒几何(Zero-Doppler Geometry)
- 已经做过:多视、幅度检测、地距重采样、burst拼接、几何校正到WGS84椭球(无DEM,仅椭球校正)
它不是斜距(Range-Doppler)平面,而是地距-方位(GR-Az)均匀采样的图像,因此定位不能直接用SLC的R-D模型硬套,必须用GRD产品规定的地理定位模型:
基于零多普勒面 + 地距/方位时间映射 + 星历插值 + 椭球求交。
给定GRD图像像素坐标 (x, y)(x=距离向像素,y=方位向像素),流程是:
- 像素(x,y) → 映射到方位向时间 ta、地距向采样点 rg
- 由ta 插值卫星位置 Sta 、速度 Vta
- 由地距 rg → 换算斜距 R (GRD是地距,必须转斜距)
- 在零多普勒面上,联立:
- 斜距方程:|P-Sta|=R
- WGS84椭球方程
- 联立求解得到地面点 大地坐标 (B,L,H) → lat, lon
P表示大地坐标点位置,R表示斜距矢量。
GRD产品里已经提供了大量关键系数(行时间、地距起始、地距间隔、近距斜距、曲率校正系数等),不用你从头建模。
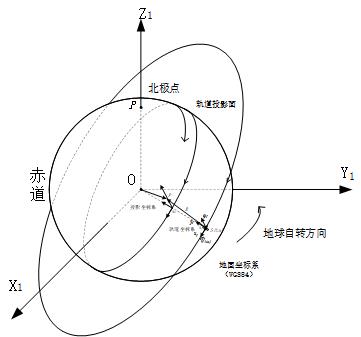
图 1 SAR图像目标定位分析图
注:1 姿态角会影响速度V的方向,因此需要求R*V,R为卫星轨道坐标系到天线坐标系旋转矩阵。注意中间还有卫星本体坐标系。
三、符号与坐标系约定(与哨兵1号产品文档一致)
- 图像坐标系:
- x:Ground Range 距离向像素,从左到右增大
- y:Azimuth 方位向像素,从上到下增大
- 输出:WGS84椭球,经纬度(lon, lat),单位度
- 卫星状态:位置S=XYZECEF ,速度V=VXVYVZECEF ,均为地心地固ECEF系
- 零多普勒条件:目标P在卫星瞬时速度矢量垂直的平面上
步骤1:从GRD产品中读取定位关键参数
这些都在 S1A_IW_GRDH_1SDV_xxx.xsd.xml 或产品的 annotation XML 里:
1)方位向(Azimuth)关键参数
- linesPerBurst:每个burst行数
- numBursts:burst总数
- azimuthTimeStart, azimuthTimeEnd:每个burst的起止时间
- azimuthPixelSpacing:方位向像元间距(或直接用行时间差)
- 每个像素y对应的绝对方位时间 ta
2)地距向(Ground Range)关键参数
- firstGroundRangeSample:第一个距离向像素对应的地距
- groundRangePixelSpacing:地距像元间距 Δrg
- slantRangeToFirstGroundRangeSample:第一个地距像素对应的斜距
- groundRangeToSlantRange 多项式/查找表:GRD产品自带的地距↔斜距转换(由地球曲率、入射角决定)
重点:GRD是地距等间隔采样,斜距不是等间隔,必须用产品提供的转换,不能自己简单除cosθ。
步骤2:像素(x,y) → 方位时间 tₐ
对GRD,每一行y对应唯一的方位向时间(零多普勒时间)。
2.1 找到像素y属于哪个burst
在对应burst内,线性插值得到该行的绝对时间:
ta(y) = taz_start+yin_burst ˙ Δtaz
其中:
- tazstart :该burst第一行的方位时间
- Δtaz :方位向脉冲重复时间对应的行采样间隔
哨兵1号GRD的方位时间是严格逐行线性的,直接线性插值即可,精度足够。
2.2 由 tₐ 插值卫星位置与速度
使用提供的星历点(orbit state vectors),用拉格朗日插值或三次样条,插值得到:
S(ta)=[XS(ta), YS(ta), ZS(ta)]ECEF
V(ta)=[VX(ta), VY(ta), VZ(ta)]ECEF
(速度必须同时刻插值,不能近似)
步骤3:像素x → 地距 r_g → 斜距 R
3.1 像素x → 地距
rg(x)=rg0+x⋅Δrg
- rg0 :x=0对应地距
- Δrg :groundRangePixelSpacing
3.2 地距 r_g → 斜距 R(核心!GRD专用)
Sentinel-1 GRD产品在XML里提供了地距到斜距的映射,一般两种形式:
- 分段线性表
- 多项式:
Rrg=a0+a1rg+a2rg2+a3rg3
严禁自己用 R = r_g / cos(θ) 近似,误差会到米级~十米级,不符合产品几何。
拿到R,就是该像素在零多普勒时刻对应的斜距。
步骤4:联立零多普勒 + 斜距 + 椭球,解地面点P
这是SAR几何定位的标准闭式,GRD同样遵守零多普勒定位模型。
我们要求地面点P(ECEF)满足3个方程:
方程1:斜距方程
∥P−S(ta)∥=R
即:
(PX−XS)2+(PY−YS)2+(PZ−ZS)2=R2 (1)
方程2:零多普勒方程
GRD所有像素都在零多普勒面上:
(P−S(ta))⋅V(ta)=0 (2)
方程3:WGS84椭球方程
(PX2+PY2)/a2+PZ2/b2 = 1 (3)
其中:
- a = 6378137.0m (长半轴)
- b = 6356752.314245m (短半轴)
步骤5:求解地面点P(ECEF)
(1)(2)(3) 是3个方程3个未知数,闭式可解,不需要迭代(工程常用闭式解)。
由方程(2),P 位于过S、以V
为法向量的平面。在该平面内建立局部坐标系:
u=V(ta)(法向)
w=∥S(ta)∥S(ta)(地心径向)
v=w×u
得到局部正交基[u,v,w]
。
将P
表示为:
P=S+αv+βw
代入零多普勒方程(2)自动满足,再代入(1)和(3),得到一个一元二次方程,直接求根,取地表正根即可。
解出P=PXPYPZ
后,ECEF转经纬度,就得到你要的地理坐标。
步骤6:ECEF → 经纬度 (lon, lat)
使用标准WGS84大地坐标系转换:
- 经度:
λ=arctan2(PY, PX)
- 纬度(迭代法,3步收敛):
h=0,N=a,
循环:
五、GRD与SLC定位的关键区别(你必须注意,否则必错)
- SLC:斜距等间隔,直接用R-D模型
- GRD:地距等间隔,斜距不等距,必须用产品自带的gr→sr转换
- 这是90%的人算GRD定位不准的根源
- GRD已经做过多视、拼接、地距重采样,不能再用SLC的burst原始斜距时间。
- GRD定位不使用卫星姿态(姿态几乎不影响),只需要轨道+星历
- 因为GRD已经重采样到零多普勒地距,姿态误差在产品生产时已补偿
- 你给的姿态角,在GRD定位中几乎用不上,这是和光学图像最大的不同!
重要结论:
哨兵1号GRD像素定位,主要依赖轨道(位置+速度)+地距/斜距映射,姿态角几乎不参与计算。
光学图像必须用姿态,SAR-GRD不用,这是行业常识。
哨兵1号GRDH数据为零多普勒地距投影产品,像素(x,y)到地理坐标的解算流程为:
- 由像素方位向y插值得到零多普勒时间,并插值卫星位置与速度;
- 由距离向x结合产品参数得到地距,再通过产品内置转换得到斜距R;
- 联立斜距方程、零多普勒方程、WGS84椭球方程,闭式解算地面点ECEF坐标;
- 将ECEF坐标转换为WGS84经纬度地理坐标。
该过程以轨道为核心,姿态角影响可忽略,与光学图像基于共线方程与姿态的定位模型完全不同。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)