超级电容matlab simulink储能模型仿真,能量管理 蓄电池充放电模型,电池-超级电容混合储能系统能量管理
超级电容matlab simulink储能模型仿真,能量管理
蓄电池充放电模型,电池-超级电容混合储能系统能量管理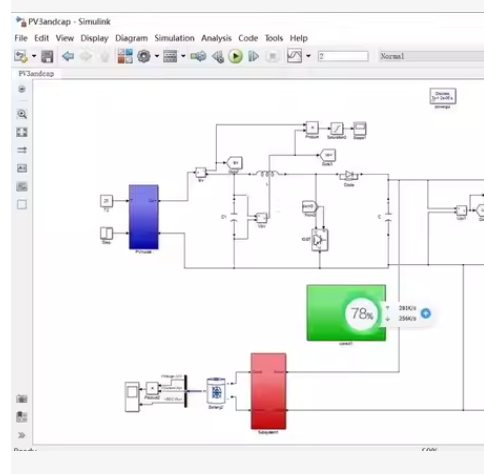
这是一个关于超级电容-蓄电池混合储能系统(HESS)能量管理策略的完整MATLAB/Simulink仿真方案。
一、系统架构与仿真模型
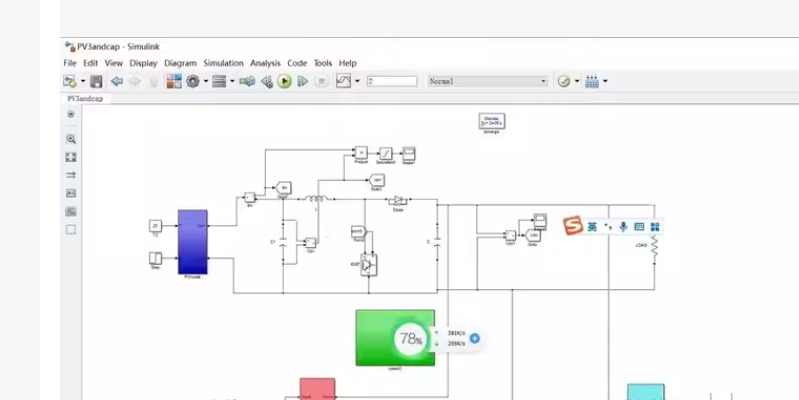
混合储能系统通常包含:负载、蓄电池、超级电容、双向DC-DC变换器和能量管理控制器。
模型组成
蓄电池模型 (Battery): 使用 Simscape > Electrical > Sources > Battery 模块。参数设置为:额定电压 300V,容量 100Ah。
超级电容模型 (Supercapacitor): 使用 Simscape > Electrical > Passive > Supercapacitor 模块。参数设置为:额定电压 400V,电容值 100F。
双向 DC-DC 变换器 (Bidirectional Converter): 使用 Simscape > Electrical > Semiconductors & Converters > Converters > Bidirectional DC-DC Converter 模块。
负载 (Load): 使用 Simscape > Electrical > Sources > Controlled Current Source 模块,输入一个波动的电流信号(模拟负载变化)。
控制器 (Controller): 使用 Simulink > Commonly Used Blocks > MATLAB Function 模块。
连接方式
蓄电池和超级电容分别通过各自的双向 DC-DC 变换器连接到公共直流母线。
公共直流母线连接到负载。
能量管理控制器接收负载电流和直流母线电压作为输入,输出占空比信号给两个变换器。
二、能量管理策略 (MATLAB Function 代码)
本例采用基于低通滤波的功率分配策略。核心思想是:低频功率分量(能量)由蓄电池提供,高频功率分量(功率波动)由超级电容提供,从而平抑蓄电池的电流波动,延长其寿命。
将以下代码放入 MATLAB Function 模块中:
function [D_batt, D_sc] = energy_management(load_current, bus_voltage, rated_voltage)
% 输入:
% load_current: 负载需求电流 (A)
% bus_voltage: 直流母线电压 (V)
% rated_voltage: 额定电压参考值 (V)
% 输出:
% D_batt: 蓄电池侧变换器占空比
% D_sc: 超级电容侧变换器占空比
% ================= 参数设置 =================
% 低通滤波器截止频率 (Hz),决定功率分配的“分界点”
fc = 0.1;
% PID 控制器参数 (用于电压外环,维持母线电压稳定)
Kp = 0.1;
Ki = 0.01;
% 蓄电池最大充放电电流限制 (A)
I_batt_max = 50;
I_batt_min = -50;
% ================= 状态变量 =================
% 使用 persistent 变量来存储滤波后的电流和积分项
persistent I_batt_ref I_sc_ref integral_error
if isempty(I_batt_ref)
I_batt_ref = 0;
I_sc_ref = 0;
integral_error = 0;
end
% ================= 1. 功率分配 (低通滤波) =================
% 蓄电池参考电流 = 负载电流的低频分量
% 这里使用一阶低通滤波器的差分方程形式
% I_batt_ref(k) = alpha * I_load(k) + (1-alpha) * I_batt_ref(k-1)
Ts = 1e-4; % 仿真步长
alpha = 2 * pi * fc * Ts / (1 + 2 * pi * fc * Ts);
I_batt_ref = alpha * load_current + (1 - alpha) * I_batt_ref;
% 限制蓄电池电流在安全范围内
I_batt_ref = min(max(I_batt_ref, I_batt_min), I_batt_max);
% 超级电容参考电流 = 负载电流 - 蓄电池参考电流 (高频分量)
I_sc_ref = load_current - I_batt_ref;
% ================= 2. 电压外环控制 (PI 控制) =================
% 计算电压偏差
v_error = rated_voltage - bus_voltage;
% 积分项防饱和
integral_error = integral_error + v_error * Ts;
integral_error = min(max(integral_error, -100), 100); % 积分限幅
% 计算控制量 (此处简化为直接输出占空比增量,实际可根据变换器拓扑调整)
delta_d = Kp * v_error + Ki * integral_error;
% ================= 3. 生成占空比 =================
% 蓄电池侧占空比 (Buck/Boost 模式)
% 注意:具体公式取决于变换器拓扑和控制模式
D_batt = 0.5 + delta_d;
% 超级电容侧占空比
D_sc = 0.5 + delta_d;
% 占空比限幅 (0~1)
D_batt = min(max(D_batt, 0), 1);
D_sc = min(max(D_sc, 0), 1);
三、仿真参数与结果分析
仿真设置
求解器: ode23tb (适合电力电子开关模型) 或 ode45。
仿真时间: 100 秒。
负载电流: 使用 Signal Builder 或 Repeating Sequence 模块生成一个包含突变和波动的电流波形。
关键波形观测
运行仿真后,观测以下波形:
负载电流 vs. 蓄电池电流 vs. 超级电容电流:
你会看到蓄电池电流是一条平滑的曲线,只响应慢变化的负载。
超级电容电流是一条波动剧烈的曲线,负责吸收尖峰。
直流母线电压:
应保持在额定值附近(如 400V),波动很小,证明控制器有效。
超级电容电压:
随着充放电会有小幅波动,但在合理范围内。
四、扩展与优化
蓄电池模型改进: 将理想电压源替换为 Thevenin等效电路模型 (包含 R_{int} 和 C_{p}),代码如下:
function V_batt = battery_model(SOC, I_load)
% 简单的Thevenin模型
V_oc = 3.7 * 100; % 开路电压 (假设单体3.7V,串联100个)
R_int = 0.01; % 内阻
V_batt = V_oc - I_load * R_int;
end
控制策略升级:
模糊逻辑控制 (Fuzzy Logic): 当系统参数不确定时,模糊控制比PI控制更鲁棒。
模型预测控制 (MPC): 优化未来一段时间内的能量分配,最小化损耗。
核心代码:光伏 MPPT 与超级电容电压控制
光伏阵列 输出电压 V_{pv} 和电流 I_{pv}。
Boost 变换器 用于 MPPT。
双向 DC-DC 变换器 连接超级电容。
超级电容 维持直流母线电压稳定。
光伏 MPPT 控制器代码 (P&O 算法)
将此代码放入一个 MATLAB Function 模块中,用于控制左侧的 Boost 变换器。
function Duty_Boost = MPPT_Control(Vpv,Ipv)
% MPPT 控制器:扰动观察法 (P&O)
% 输入: Vpv (光伏电压), Ipv (光伏电流)
% 输出: Duty_Boost (Boost 变换器占空比)
% 初始化静态变量
persistent Pprev Vprev Dprev;
if isempty(Dprev)
Dprev = 0.5; % 初始占空比
Pprev = 0;
Vprev = 0;
end
% 计算当前功率
Pnow = Vpv * Ipv;
Vnow = Vpv;
% 计算功率变化和电压变化
dP = Pnow - Pprev;
dV = Vnow - Vprev;
% 扰动观察法逻辑
if dP > 0
if dV > 0
Dnext = Dprev + 0.001; % 增大占空比
else
Dnext = Dprev - 0.001; % 减小占空比
end
else
if dP 0
Dnext = Dprev - 0.001; % 减小占空比
else
Dnext = Dprev + 0.001; % 增大占空比
end
else
Dnext = Dprev; % 功率不变,维持现状
end
end
% 限制占空比范围 (0.1 ~ 0.9)
Duty_Boost = max(0.1, min(0.9, Dnext));
% 更新历史值
Pprev = Pnow;
Vprev = Vnow;
Dprev = Duty_Boost;
超级电容电压/功率均衡控制器
将此代码放入另一个 MATLAB Function 模块中,用于控制右侧连接超级电容的双向变换器。
function Duty_SC = SC_Control(Vdc, Vref, Vsc, Vsc_max, Vsc_min)
% 超级电容控制器:维持母线电压稳定
% 输入: Vdc (直流母线电压), Vref (参考电压)
% Vsc (超级电容电压), Vsc_max/min (电压限值)
% 输出: Duty_SC (双向变换器占空比)
% 简单的 PI 控制器逻辑
Kp = 0.1;
Ki = 0.01;
persistent Integral;
if isempty(Integral)
Integral = 0;
end
% 电压偏差
Error = Vref - Vdc;
% 积分项
Integral = Integral + Error * 1e-6; % 假设仿真步长很小
% PID 输出 (这里简化为 PI)
Duty = Kp * Error + Ki * Integral;
% 超级电容电压保护逻辑
if Vsc > Vsc_max
% 电容过压,禁止充电(强制放电或断开)
Duty = 1.0; % 或者设定为特定的放电占空比
elseif Vsc < Vsc_min
% 电容欠压,禁止放电
Duty = 0.0;
end
% 限制占空比
Duty_SC = max(0, min(1, Duty));
三、Simulink 模型搭建建议
左侧 (光伏部分):
使用 PV Array 模块。
使用 MOSFET/Diode 搭建 Boost 电路。
将上面的 MPPT_Control 代码放入 Function 模块,连接到 PWM Generator。
中间 (直流母线):
使用 Capacitor 模块作为直流支撑电容。
使用 Voltage Measurement 模块测量母线电压 V_{dc}。
右侧 (负载与超级电容):
超级电容: 使用 Supercapacitor 模块。
双向变换器: 使用 H-Bridge 或 Buck/Boost 结构。
负载: 可以是电阻,也可以是 Controlled Current Source 来模拟波动负载。
显示: 图片中的 “78%” 可能是 SOC (State of Charge) 显示,可以用 Vsc / Vsc_max * 100 来计算。
四、关键参数设置
为了仿真运行顺畅,请设置以下参数:
求解器 (Solver): ode23tb (适合电力电子开关) 或 ode15s。
仿真时间: 0 到 1 秒 (观察动态响应)。
PWM 频率: 10 kHz (对应占空比输出的采样时间)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 17
17 0
0- 0



 已为社区贡献91条内容
已为社区贡献91条内容

所有评论(0)