【专栏二:深度学习09】-【一张图讲清楚:过拟合是什么?模型为什么会学“过头”】
文章目录
前言
一张图讲清楚:什么是过拟合?模型为什么会学“过头”?
很多人刚接触模型训练时,都会遇到一个很困惑的现象:
- 训练集表现越来越好 ✔
- 测试集表现却越来越差 ❗
甚至会出现:训练准确率 99%,测试准确率只有 70%,这并不是模型变差了,而是:模型学“过头”了(Overfitting)
这张图其实讲了两件非常重要的事情:
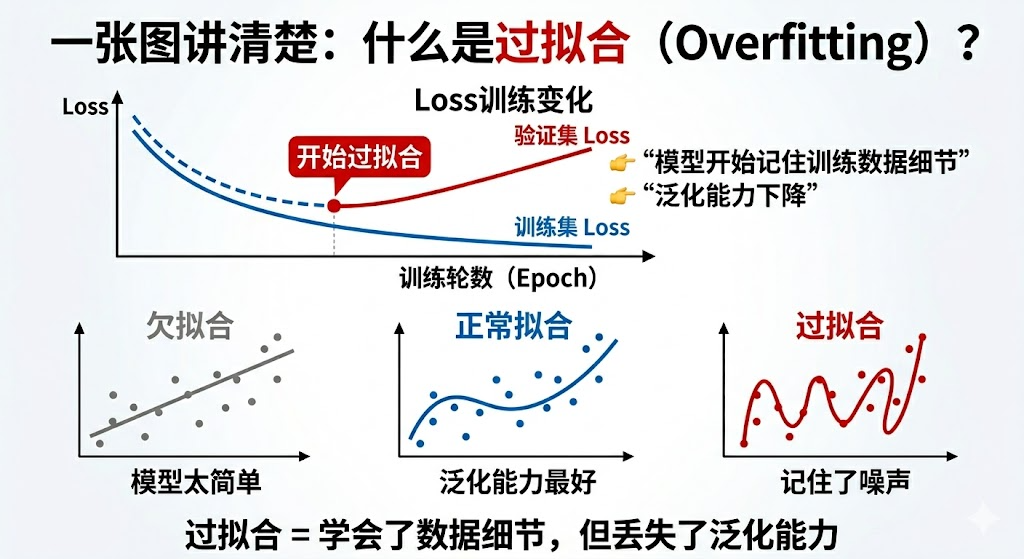
1️⃣ 上半部分:Loss 曲线(最关键)
- 蓝线(训练集 Loss):一直下降
- 红线(验证集 Loss):先下降 → 后上升
👉 关键转折点:验证集 Loss 开始上升的那一刻,就是过拟合开始的地方
2️⃣ 下半部分:三种拟合状态
- 欠拟合:模型太简单,连规律都没学会
- 正常拟合:学到规律,泛化能力最好
- 过拟合:不仅学规律,还记住了噪声
👉 一句话先记住:过拟合 = 学会了数据细节,但丢失了泛化能力
一、从“训练过程”理解:模型到底在做什么?
很多人理解过拟合卡住的地方在于:
- ❌ 只看结果
- ✅ 没看训练过程
模型在训练时,其实只在做一件事:
也就是说:模型的目标只有一个:让训练集 Loss 变小,但这里有一个致命问题:❗Loss 函数只关心“训练数据”,不关心“未来数据”
所以模型会:既学规律,也学噪音
👉 这就是过拟合的根源:
模型没有“理解能力”,只有“优化能力”
二、用一个贯穿案例讲透(核心)
假设我们有一组数据:
👉 本质规律是:y ≈ x,但每个点都有一点随机误差(噪声)。
第一阶段:模型还不会(欠拟合)
模型很简单:y = 常数
结果:
- 完全拟合不了
- 误差很大
👉 特点:模型太弱,连规律都没学会
第二阶段:模型学到规律(最佳状态)
模型变强一点:y = ax + b
结果:
- 能抓住整体趋势
- 不受个别点影响
👉 这是最理想状态:学规律,不学噪声
第三阶段:模型继续学习(过拟合开始)
模型继续优化,会发生什么?
它会发现:“这些点不是完全在直线上,我可以再优化一下”
于是模型开始:
- 调整曲线去贴每一个点
- 包括那些“随机误差”
👉 最终变成:一条非常扭曲的曲线,穿过所有点
👉 这时候:
- 训练集:几乎完美 ✔
- 测试集:表现变差 ❗
👉 本质:
模型把“噪声”当成了“规律”
三、为什么训练越久,越容易过拟合?
这个问题非常关键。
原因1:模型容量(Model Capacity)
模型越复杂(参数越多):
- 能表达的函数越复杂
- 越容易“记住数据”
👉 类比:
- 小学生 → 学规律
- 记忆大师 → 可以背整本书
👉 深度网络就是“记忆能力极强的模型”
原因2:训练时间(Epoch 太多)
训练时间越长:
- 模型优化得越极致
- 越容易把噪声也学进去
👉 对应图:Epoch 增加 → 验证 Loss 开始上升
原因3:数据量不够
数据太少时:
- 噪声占比变大
- 模型更容易“误判规律”
👉 一句话:
数据少 + 模型强 → 最容易过拟合
原因4:数据有噪声
现实数据不是完美的:
- 标注错误
- 随机波动
模型不会区分:
- 哪些是规律
- 哪些是噪声
四、再从“泛化能力”角度理解(关键提升)
什么是泛化能力?模型在“新数据”上的表现能力
过拟合的本质就是:
- 在训练集上很好
- 在新数据上变差
数学上可以理解为:
核心矛盾:训练能力(fit)vs 泛化能力(generalization)
五、用代码视角再理解一次(工程感)
一个典型训练过程:
for epoch in range(epochs):
train_loss = model.train(train_data)
val_loss = model.evaluate(val_data)
你会观察到:
- Epoch 1: train ↓ val ↓
- Epoch 5: train ↓ val ↓
- Epoch 10: train ↓ val ↑ ❗
如果你只看 train_loss:你会以为模型越来越好
但 val_loss 在告诉你:模型已经开始学歪了
六、回到这张图,再看一遍(彻底理解)
现在你再看图:
上半部分(Loss 曲线)
- 蓝线:模型在“记住数据”
- 红线:泛化能力下降
下半部分(拟合图) - 欠拟合:不会
- 正常拟合:刚刚好
- 过拟合:学太多
👉 关键不是“拟合多好”,而是:是否还能适用于新数据
你可以只记住这三句话:
1️⃣ 模型训练的目标是降低训练误差,但不保证泛化能力
2️⃣ 模型越强、训练越久,越容易记住噪声
3️⃣ 过拟合 = 学会了数据细节,但丢失了泛化能力
再给你一句最核心的:模型不是学得越多越好,而是学对才重要
七、什么是噪音?
在机器学习里,噪音(Noise) 指的是:
- 数据中那些随机的、不稳定的、不能代表真实规律的信息。
模型真正应该学的是“规律”,而不是“噪音”。但问题在于,模型并不知道谁是规律,谁是噪音,它只会尽量把训练误差降到最低。于是当模型过强、训练过久时,就可能把噪音也一起学进去,这就会导致过拟合。
常见的噪音来源有几种:
第一种是测量误差。
比如温度传感器本来应该读到 25°C,但因为设备误差显示成了 25.6°C。
第二种是标注错误。
比如一张明明是“猫”的图片,被人工误标成了“狗”。
第三种是随机波动。
比如房价整体和面积相关,但某一套房因为装修、楼层、采光等偶然因素,比正常价格高很多。
第四种是无关信息干扰。
比如识别猫狗图片时,模型不小心把“背景草地”也当成了判断依据,但草地本身并不是猫的本质特征。
八、为什么噪音会导致过拟合?
因为模型训练时只会想办法让训练集 Loss 变小。如果模型容量足够大,它不仅能学会“主要规律”,还可能把那些偶然偏差也硬记下来。
举个简单例子,假设真实规律大致是:y≈x,但训练数据里某些点因为误差,偏离了这条趋势线。
- 如果模型太简单,它可能抓不住规律;
- 如果模型刚刚好,它会学到“整体趋势”;
- 如果模型太复杂,它就会努力把每个偏离点都拟合进去。
这时候模型学到的就不再只是规律,而是:规律 + 噪音
于是它在训练集上表现很好,但到了新数据上就不行了,因为新数据里的噪音不会和训练集一模一样。
一句话总结
噪音就是数据里那些不能重复出现、也不该被模型当成规律学习的随机信息。
八、如何防止过拟合(正则化 / Dropout / Early Stopping)
过拟合的本质是:
模型记住了训练数据的细节和噪音,却没有真正学会可泛化的规律。
所以,防止过拟合的方法,本质上都在做一件事:限制模型“死记硬背”的能力,逼它去学更稳定的规律。
下面这三种方法最常见。
1. 正则化(Regularization)
正则化的思路可以理解成:给模型加一个“约束”,不要让参数变得太夸张。
在训练时,我们原本只优化数据误差:

加上正则化之后,就变成:
如果是最常见的 L2 正则化,可以写成:

这里的意思是:
- 第一部分:让模型尽量拟合数据
- 第二部分:惩罚过大的权重参数
——为什么这能减少过拟合?——
- 因为参数越大,模型往往越容易做出非常复杂、弯弯绕绕的拟合曲线,也越容易把噪音记进去。
- 加了正则化之后,模型会更倾向于用“更平滑、更简单”的方式去拟合数据,而不是为了追求训练集完美贴合,把自己搞得过于复杂。
你可以把正则化理解成:给模型套一个“不要太放飞”的约束。
2. Dropout
Dropout 的思路非常直观:训练时随机让一部分神经元“暂时下线”。
比如某一层有很多神经元,训练时随机关闭其中一部分,只让剩下的继续工作。下一次训练时,又随机关闭另一部分。
——这样做的作用是什么?——
如果不做 Dropout,模型可能会过度依赖某几个特别“好用”的神经元。
一旦这些神经元学到了一些训练集特有的细节,模型就会越来越容易过拟合。
而 Dropout 会迫使模型:
- 不能总依赖固定的少数神经元
- 必须学会更分散、更稳健的特征表达
- 不容易把某些偶然噪音绑定到单一路径上
你可以把 Dropout 理解成:训练时故意“打乱协作”,防止模型形成死记硬背的小团体。
所以它的本质是:降低神经元之间的过度依赖,提升模型泛化能力。
3. Early Stopping
Early Stopping 的思路最容易理解:
不要等模型开始学歪了才停,要在它刚刚最好的时候停下来。
回到你那张图:
- 训练集 Loss 一直下降
- 验证集 Loss 先下降后上升
当验证集 Loss 开始上升时,其实就是在提醒你:模型已经开始记住训练数据细节,泛化能力在变差了
Early Stopping 的做法就是:
- 一边训练
- 一边监控验证集表现
- 一旦发现验证集不再变好,甚至开始变差
- 就停止训练
它的核心思想不是“训练得越久越好”,而是:在模型泛化能力最好的那个点停下,所以 Early Stopping 本质上是:用验证集帮你判断,模型有没有开始过拟合。
这三种方法分别在解决什么问题?你可以这样理解:
正则化:限制模型不要太复杂
Dropout:防止模型过度依赖局部特征
Early Stopping:在模型开始学歪之前及时停下
它们方向不同,但目的相同:让模型更难记住噪音,更容易学到真正可泛化的规律。
一个总结:
防止过拟合的核心,不是让模型“不学习”,而是让模型“别学得太细、太死、太偏”。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 14
14 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)