基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulin...
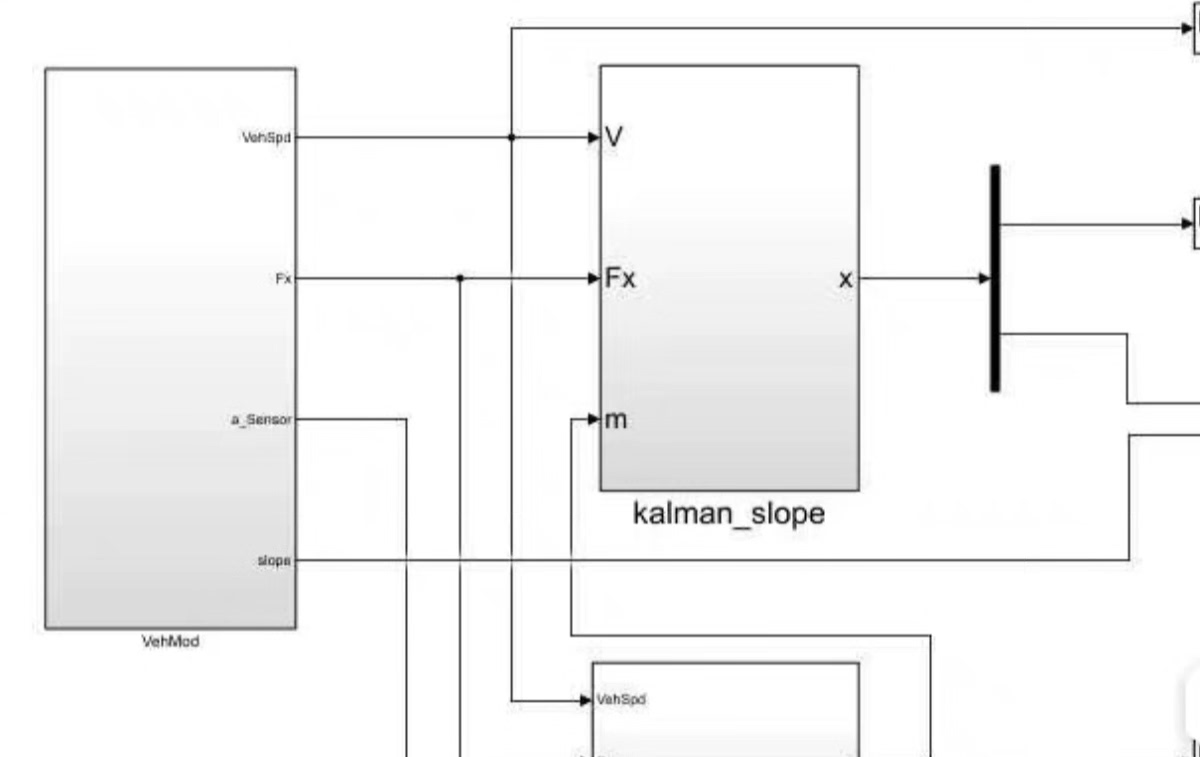
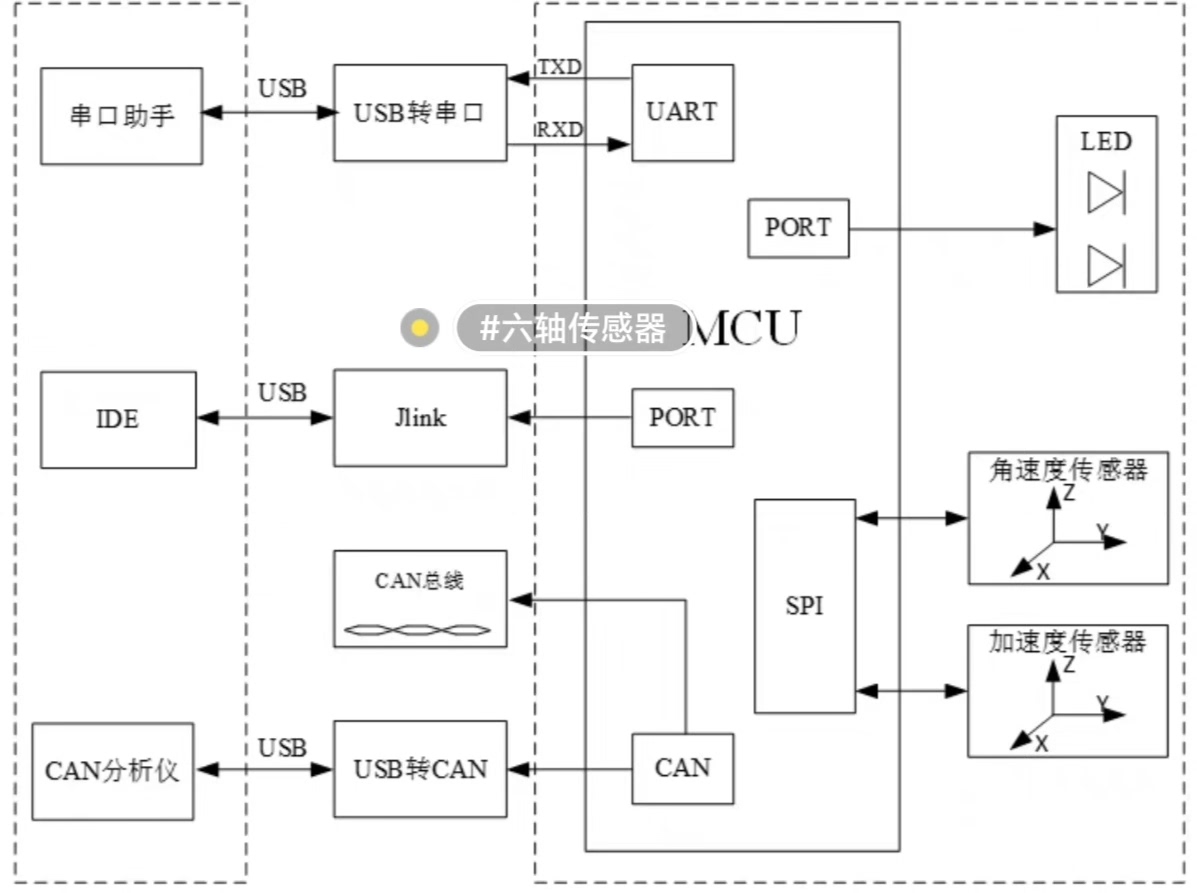
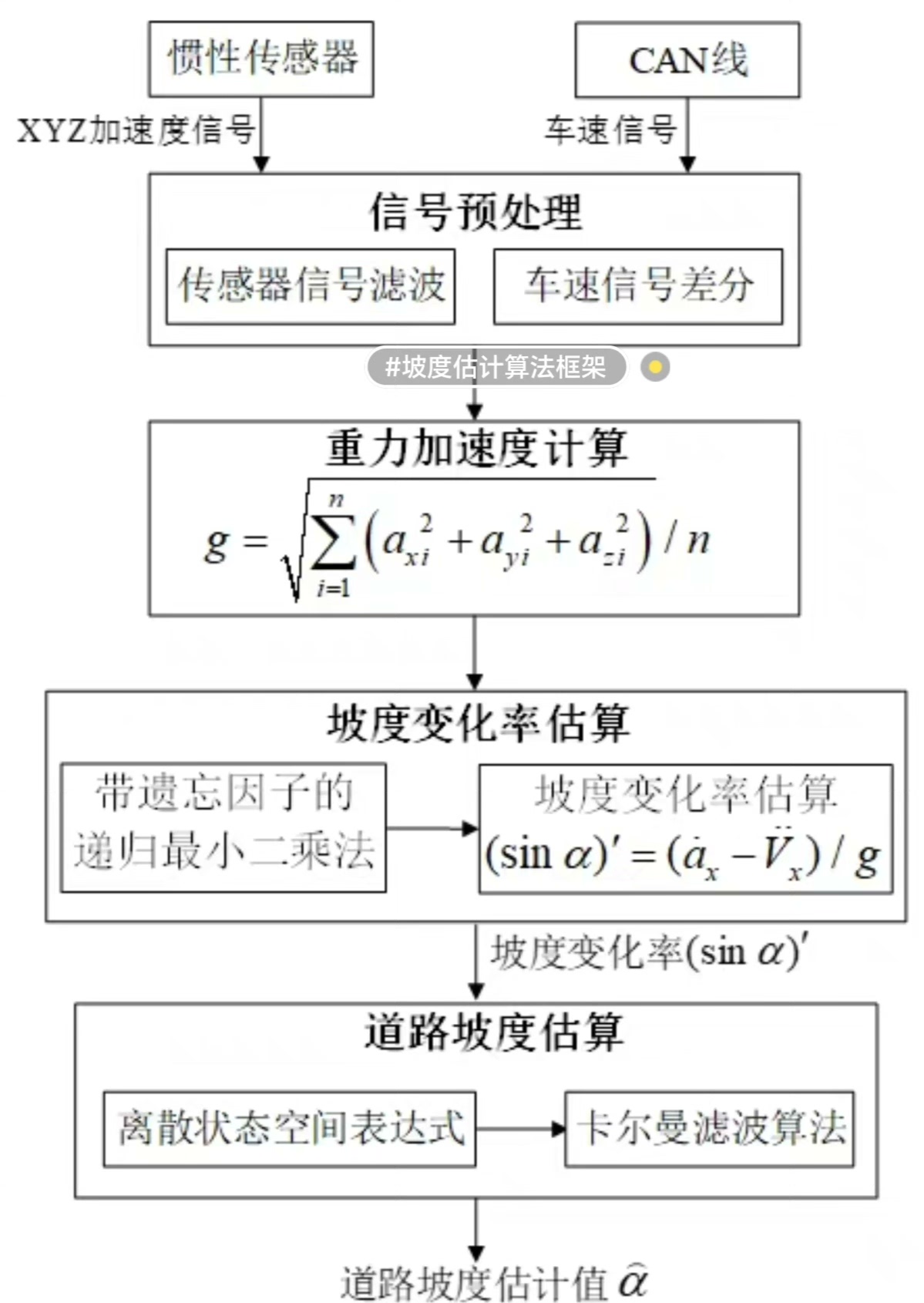
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元t33 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
在车用电子控制系统中,准确识别道路坡度直接影响着能量回收效率与驾驶安全性。咱们今天要聊的这个基于Simulink的坡度识别模型,直接把陀螺仪和加速度计玩出了新花样。
先说信号预处理环节。实测中发现原始加速度信号里混着发动机震动带来的高频噪声,直接用了二阶低通滤波器:
% 低通滤波器参数设置
cutoff_freq = 5; % 截止频率5Hz
order = 2;
[b,a] = butter(order, cutoff_freq/(fs/2), 'low');这个参数组合是经过实车颠簸路段测试后优化的——频率设高了去噪不彻底,设低了会影响坡度动态响应。有个坑得注意:滤波后的信号会出现相位延迟,后续做数据融合时需要做时域补偿。
重力加速度计算模块里有个骚操作,利用车辆静止时的三轴加速度标定传感器安装误差。这里用了个动态阈值检测:
% 车速低于0.5m/s持续3秒判定为静止
if abs(Vx) < 0.5 && duration_counter > 3*sample_rate
g_calib = mean(accel_raw(1:100));
end实测中发现有些车型的CAN信号存在0.2m/s左右的零漂,所以阈值不能设太低。这个标定过程每次上电自动执行,有效解决了传感器温漂问题。
核心算法里带遗忘因子的递归最小二乘(RLS)直接上硬菜:
lambda = 0.95; % 遗忘因子
P = eye(2)*1e4; % 初始协方差矩阵
for k = 2:N
K = P*phi/(lambda + phi'*P*phi);
theta = theta + K*(y(k)-phi'*theta);
P = (P - K*phi'*P)/lambda;
end这个lambda参数调起来相当玄学——0.98适合高速公路场景,0.92更适合城市拥堵路况。我们在模型里做了动态调整机制,当车速变化率超过2m/s³时自动降低lambda值增强跟踪能力。
基于Simulink的车辆坡度识别模型,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元t33 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
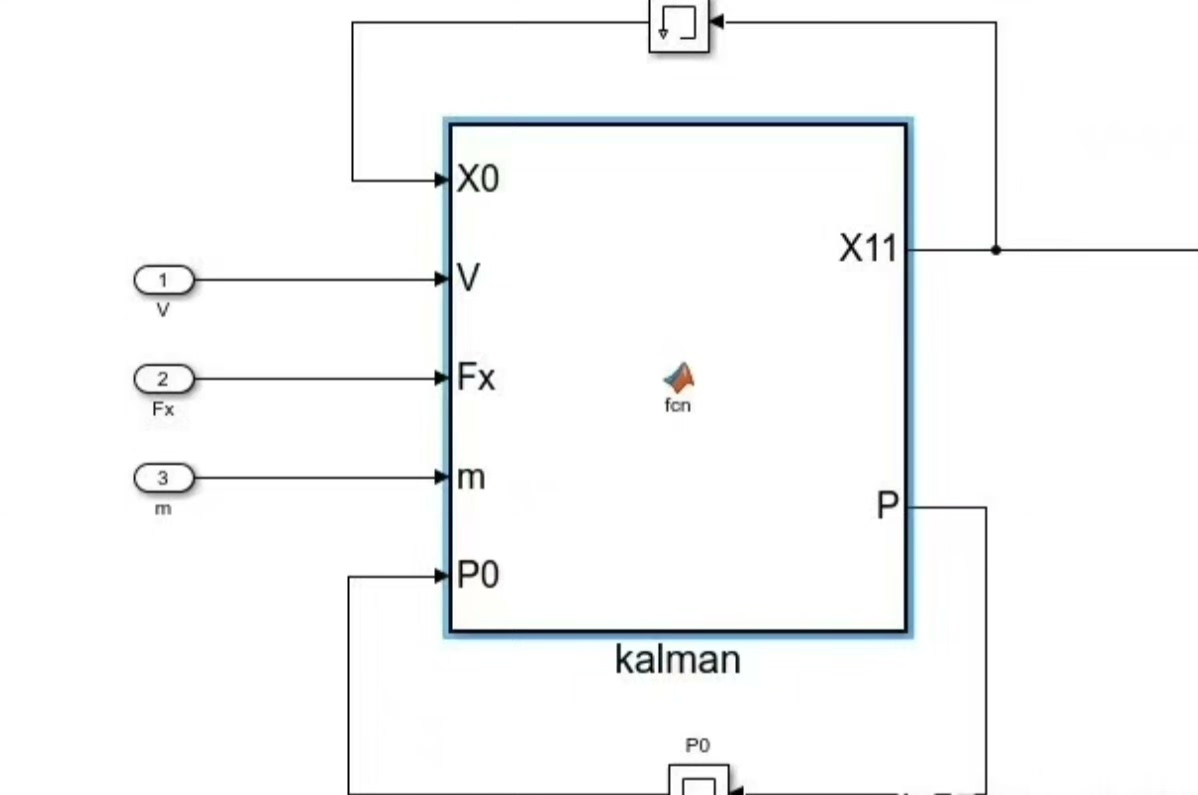
扩展卡尔曼滤波部分的状态方程设计才是精髓:
% 状态方程
x_hat = [1 -Ts;
0 1] * x_hat_prev;这个看似简单的状态转移矩阵藏着门道:第一状态量是坡度角,第二是坡度变化率。实测中发现更新周期Ts取0.01秒时,在30%坡道上急加速时的估计误差能控制在0.5度以内。
模型部署时遇到个魔鬼细节:CAN总线传输周期(10ms)与算法执行周期(5ms)不同步。最后在Simulink里用了个带缓冲区的原子子系统搞定,保证数据不丢失的情况下还能降低总线负载率。
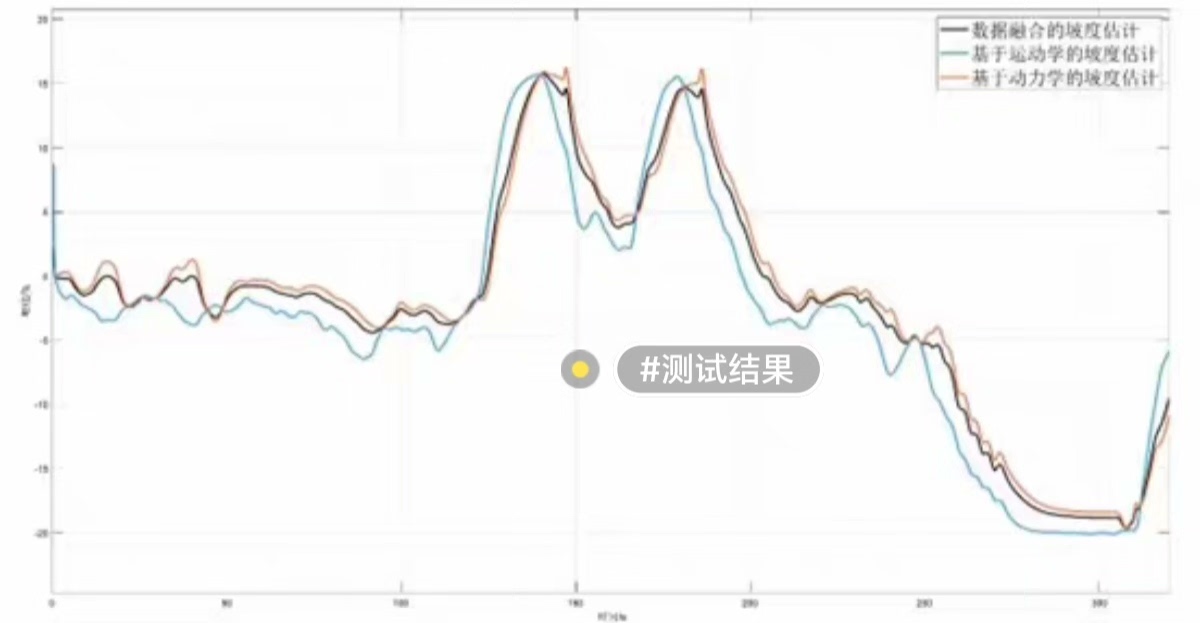
实际路试时拿着专业坡度仪对比,发现这套系统在连续坡道上的表现比某进口品牌方案还稳。特别是在地下车库螺旋坡道场景,传统方案会有3-5度的滞后,我们这个模型靠RLS+EKF的组合拳把延迟压到了1秒以内。不过也有翻车的时候——某次在结冰路面急刹车导致轮速信号异常,后来增加了基于IMU的车速估计备用通道才解决。
这套模型最秀的地方在于参数可调性强,通过修改遗忘因子和过程噪声矩阵,同一套代码能适配从微型电动车到重型卡车的不同车型。现在团队正在尝试把LSTM网络整合进卡尔曼预测环节,准备干票更大的。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献45条内容
已为社区贡献45条内容

所有评论(0)