智能算法优化PID控制参数:探索无限可能
#智能算法优化PID控制参数# 算法:支持各种算法,新算法 PID参数模型:支持传递函数模型,simulink仿真模型 已做过:算法优化三相逆变器控制PI控制参数,算法优化避雷器模型参数等
在自动化控制领域,PID控制无疑是基石般的存在。然而,传统的PID参数整定方法往往需要工程师凭借经验反复调试,不仅耗时费力,而且在复杂多变的系统中很难达到最优效果。这时候,智能算法的引入就如同给PID控制注入了一针“强心剂”,开启了优化PID参数的新篇章。
丰富多样的智能算法
我们可以支持各种各样的智能算法,无论是经典的遗传算法(GA)、粒子群优化算法(PSO),还是新兴的强化学习算法,都能在PID参数优化中大展身手。
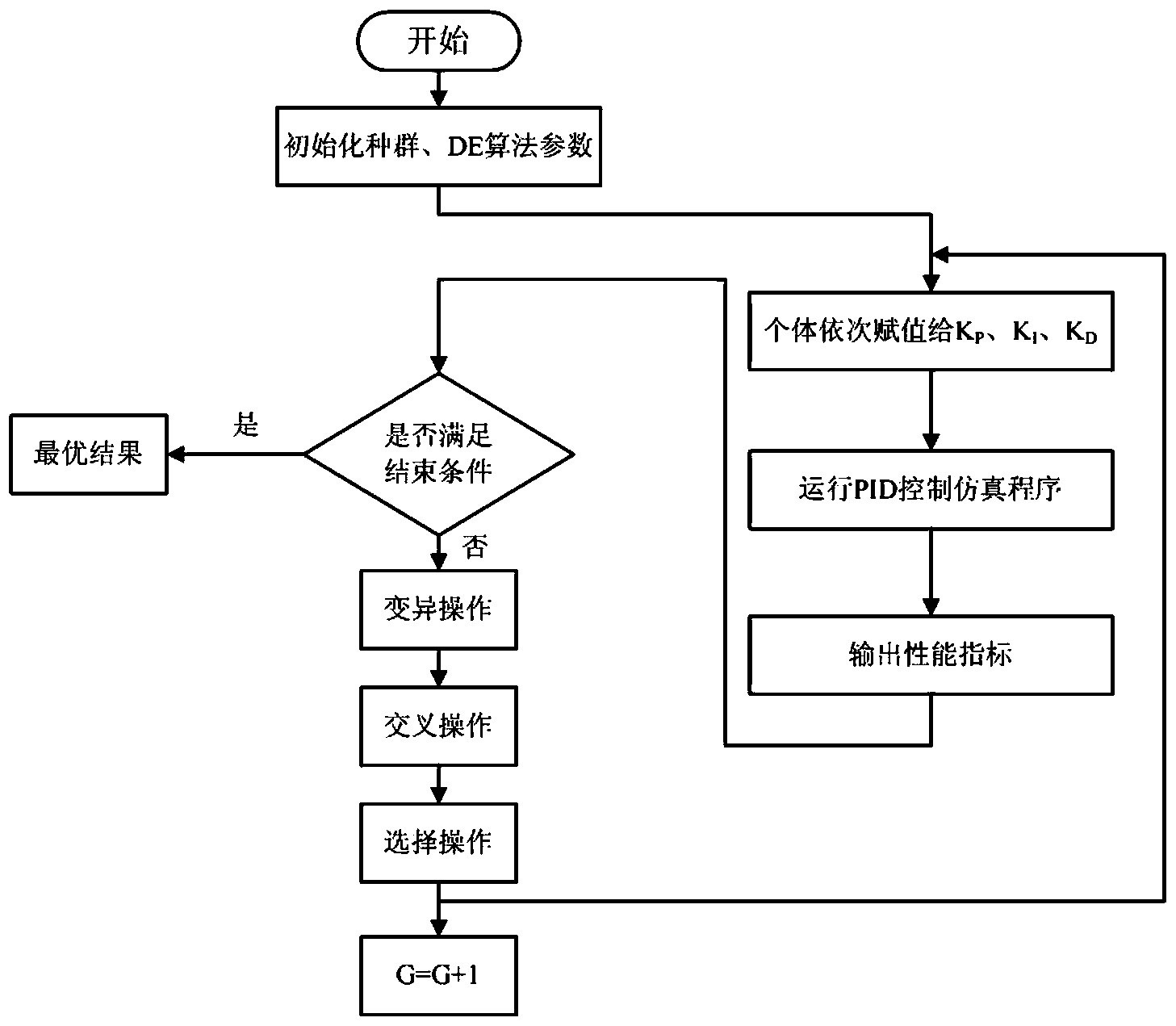
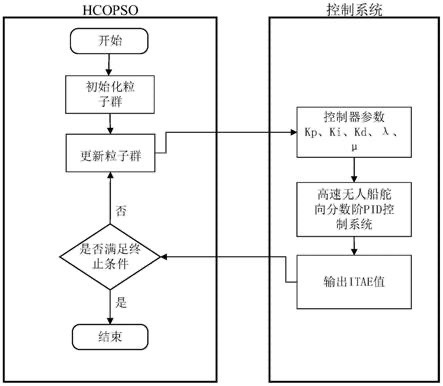
以粒子群优化算法为例,它模拟鸟群觅食行为,每个粒子代表一组可能的PID参数。粒子在解空间中飞行,通过不断调整自己的速度和位置来寻找最优解。以下是一个简单的粒子群优化算法Python代码示例:
import numpy as np
def fitness(pid_params, target):
# 这里简单模拟计算适应度,实际应用需要结合具体系统
kp, ki, kd = pid_params
error = np.sum(np.abs(target - [kp * i + ki * np.sum([j for j in range(i)]) + kd * (1 if i > 0 else 0) for i in
range(len(target))]))
return error
def pso(num_particles, num_iterations, w, c1, c2, lb, ub, target):
dim = 3 # kp, ki, kd三个参数
positions = np.random.uniform(lb, ub, (num_particles, dim))
velocities = np.zeros((num_particles, dim))
pbest_positions = positions.copy()
pbest_fitness = np.array([fitness(p, target) for p in positions])
gbest_index = np.argmin(pbest_fitness)
gbest_position = pbest_positions[gbest_index]
gbest_fitness = pbest_fitness[gbest_index]
for _ in range(num_iterations):
r1 = np.random.rand(num_particles, dim)
r2 = np.random.rand(num_particles, dim)
velocities = w * velocities + c1 * r1 * (pbest_positions - positions) + c2 * r2 * (
gbest_position - positions)
positions = positions + velocities
positions = np.clip(positions, lb, ub)
fitness_values = np.array([fitness(p, target) for p in positions])
improved_indices = fitness_values < pbest_fitness
pbest_positions[improved_indices] = positions[improved_indices]
pbest_fitness[improved_indices] = fitness_values[improved_indices]
current_best_index = np.argmin(pbest_fitness)
if pbest_fitness[current_best_index] < gbest_fitness:
gbest_fitness = pbest_fitness[current_best_index]
gbest_position = pbest_positions[current_best_index]
return gbest_position
这段代码中,fitness函数用于计算每组PID参数对应的适应度,也就是误差。在实际应用中,这个误差计算需要根据具体的控制对象和目标来精确调整。pso函数则实现了粒子群优化算法的核心逻辑,在每次迭代中,粒子根据自身的历史最优位置(pbest)和全局最优位置(gbest)来更新自己的速度和位置,从而不断向最优解靠近。
灵活的PID参数模型
我们不仅支持传递函数模型,还可以利用Simulink仿真模型来进行PID参数优化。传递函数模型以数学表达式的形式简洁地描述系统输入与输出之间的关系,方便我们从理论层面分析和优化PID参数。而Simulink仿真模型则以可视化的方式搭建系统结构,直观地展示系统的动态响应,便于我们观察和调整PID参数对系统性能的影响。
#智能算法优化PID控制参数# 算法:支持各种算法,新算法 PID参数模型:支持传递函数模型,simulink仿真模型 已做过:算法优化三相逆变器控制PI控制参数,算法优化避雷器模型参数等
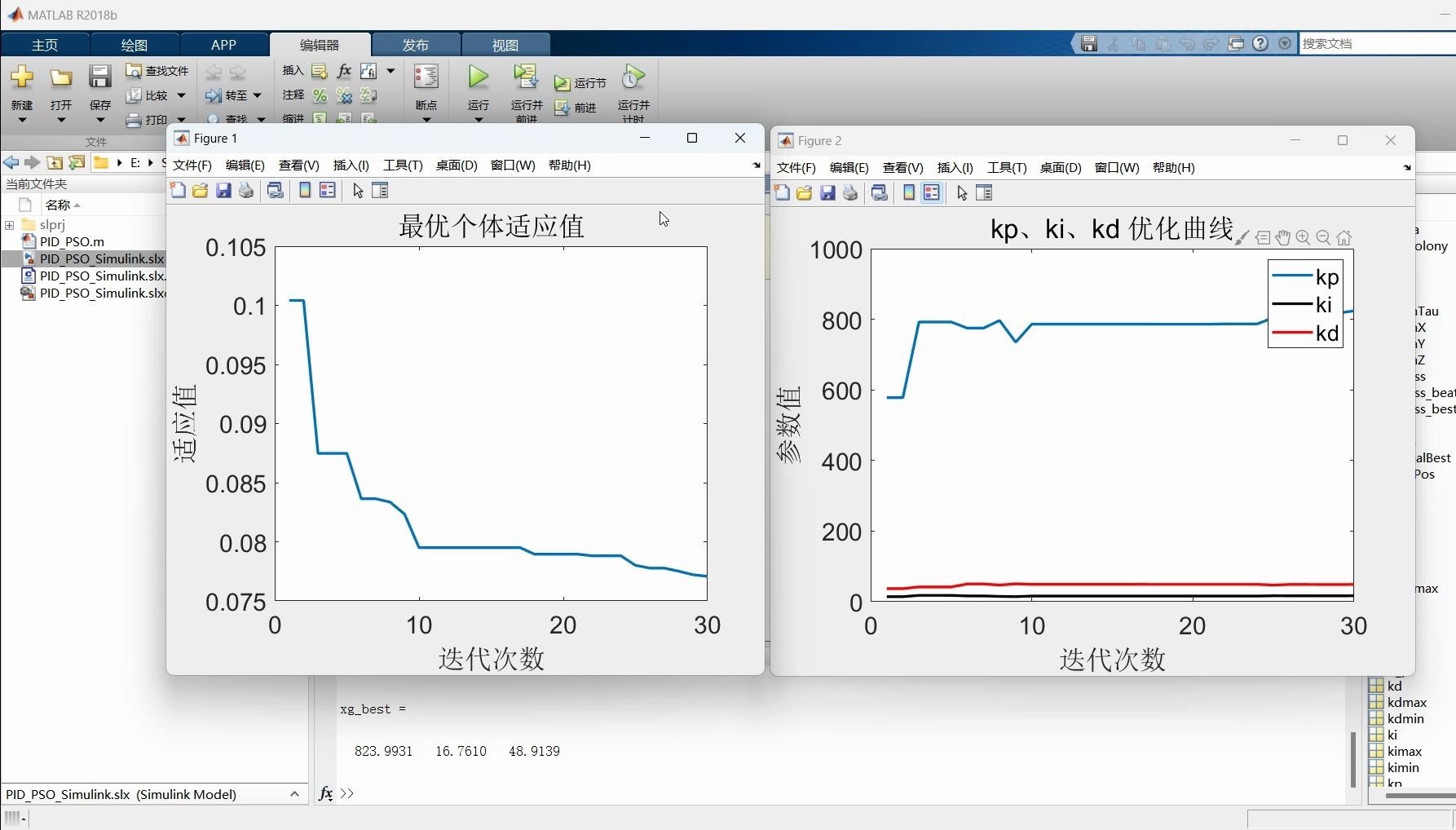
例如,在Simulink中搭建一个简单的一阶惯性系统,将PID控制器与该系统相连。通过调整PID控制器的参数,观察系统输出的阶跃响应曲线。我们可以在MATLAB脚本中调用Simulink模型,并结合智能算法来自动搜索最优的PID参数。以下是一段简单的MATLAB代码,用于调用Simulink模型并获取其输出:
% 假设Simulink模型名为'my_model'
sim('my_model');
% 获取系统输出
output = simout.Data;在实际应用中,我们可以将这段代码整合到智能算法的框架中,通过不断改变PID参数并运行Simulink模型,根据输出结果(如超调量、调节时间等)来评估每组参数的优劣,进而寻找到最优的PID参数。
过往实践成果
在实际项目中,我们已经积累了丰富的经验。例如,在算法优化三相逆变器控制PI控制参数方面,通过智能算法的应用,显著提高了逆变器输出电压的稳定性和电能质量。传统的PI控制参数整定方法难以适应逆变器负载的快速变化,导致输出电压波动较大。而引入智能算法后,能够实时根据负载情况动态调整PI参数,使逆变器在各种工况下都能保持良好的性能。
又如,在算法优化避雷器模型参数时,智能算法发挥了重要作用。避雷器的性能对于电力系统的过电压保护至关重要,而其模型参数的准确性直接影响到保护效果的评估。利用智能算法对避雷器模型参数进行优化,能够更精确地模拟避雷器在不同电压条件下的非线性特性,为电力系统的过电压防护提供更可靠的依据。
总之,智能算法优化PID控制参数具有巨大的潜力和广阔的应用前景。无论是在工业自动化、电力系统,还是航空航天等领域,都能为我们带来更高效、更稳定的控制系统。希望更多的工程师和研究者能够关注并投身于这一领域的研究,共同推动智能控制技术的不断发展。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)