基于Matlab的齿轮动力学仿真探索
基于matlab的齿轮动力学仿真。 该模型考虑动态啮合角和动态间隙非线性的影响,将扭矩直接作用于齿轮,并定义已知的系统参数:齿数、模数、转动惯量、压力角、转速等,输出齿轮X、Y方向的时变位移及FFT结果,综合变形时域图及相图和庞加莱图。 根据是时变啮合刚度和阻尼得到动态啮合力。 程序已调通,可直接运行。
在机械动力学领域,对齿轮系统进行精确的动力学仿真至关重要。今天咱就聊聊基于Matlab实现齿轮动力学仿真这事儿,这里面考虑了动态啮合角和动态间隙非线性的影响,给大家展示一个相对全面的齿轮动力学模型。
模型构建基础
首先,我们得定义一系列已知的系统参数,像齿数、模数、转动惯量、压力角、转速等。这些参数就好比是搭建房子的基石,是整个仿真模型的基础。比如,在Matlab里可以这样简单定义一些参数(这里仅为示意,实际应用会更复杂):
% 定义齿轮参数
z1 = 20; % 齿轮1齿数
z2 = 30; % 齿轮2齿数
m = 2; % 模数
alpha = 20*pi/180; % 压力角,转换为弧度
J1 = 0.01; % 齿轮1转动惯量
J2 = 0.02; % 齿轮2转动惯量
n1 = 1000; % 齿轮1转速(rpm)
omega1 = n1*2*pi/60; % 转换为角速度(rad/s)这里,我们分别给两个齿轮定义了齿数、模数、压力角以及转动惯量,同时将齿轮1的转速从每分钟转数(rpm)转换为弧度每秒(rad/s),以便后续动力学计算使用。
扭矩施加与动力学核心
接下来,把扭矩直接作用于齿轮。这一步就像是给整个系统注入“活力”,让齿轮能够动起来。假设我们有一个简单的扭矩施加方式(实际根据具体工况可能更复杂):
T1 = 10; % 施加在齿轮1上的扭矩这个T1就代表施加在齿轮1上的扭矩,单位可以根据实际设定,这里假设为10单位扭矩。
动态啮合力计算
重头戏来了,根据时变啮合刚度和阻尼得到动态啮合力。这一步是整个动力学仿真的关键部分,它模拟了齿轮在实际运行过程中相互作用的力。虽然具体的刚度和阻尼计算会依赖于更深入的机械原理和经验公式,但在Matlab里可以简单示意如下:
% 假设已知时变啮合刚度和阻尼
k = 1000; % 时变啮合刚度,假设值
c = 10; % 阻尼,假设值
% 相对位移和相对速度假设(实际由系统状态计算)
x_rel = 0.01;
v_rel = 0.1;
F = k * x_rel + c * v_rel; % 动态啮合力计算这里通过一个简单的胡克定律与阻尼力叠加的方式计算动态啮合力F,xrel和vrel假设为相对位移和相对速度,在实际程序中会根据系统的实时状态进行计算。
输出结果分析
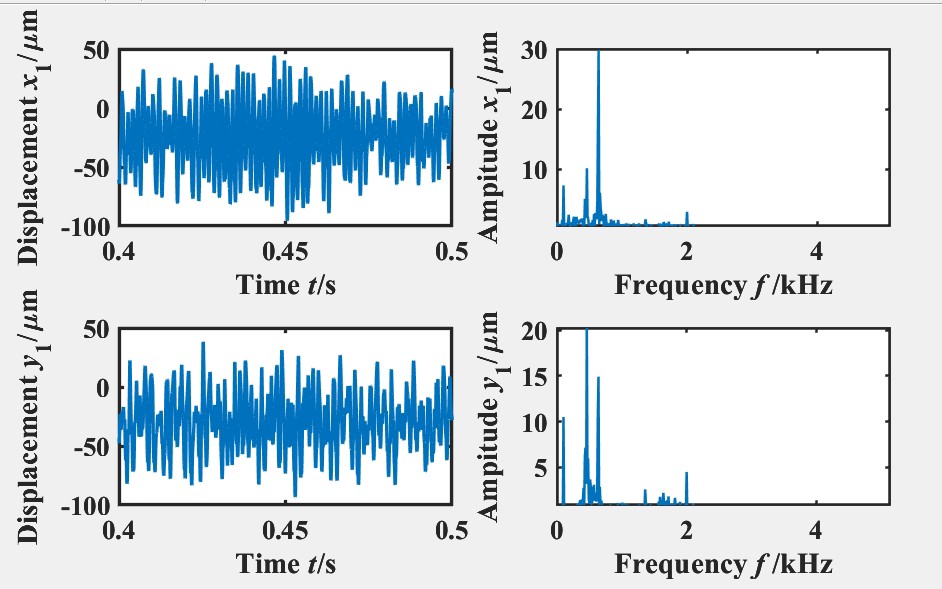
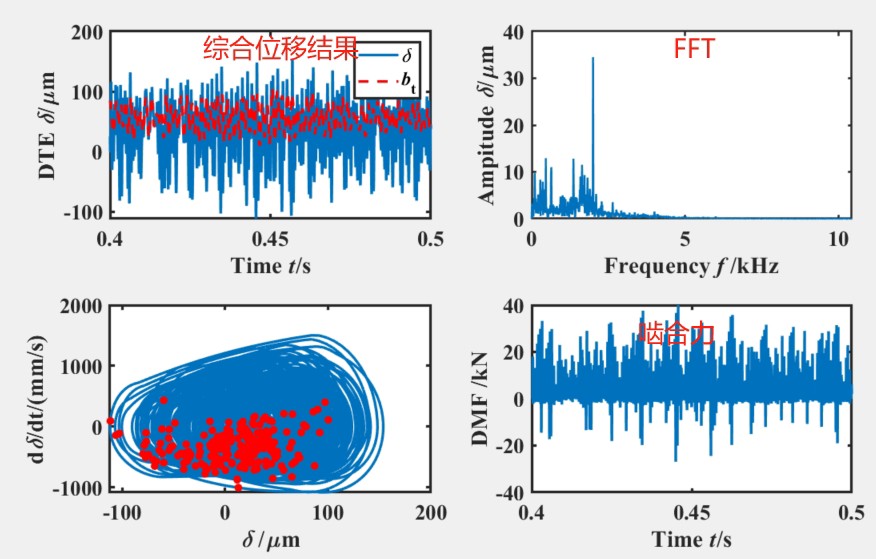
最后,我们要输出齿轮X、Y方向的时变位移及FFT结果,还要综合变形时域图及相图和庞加莱图。时变位移能让我们直观看到齿轮在不同时刻的位置变化,而FFT(快速傅里叶变换)结果则能分析出位移信号中的频率成分,帮助我们了解系统的振动特性。
% 假设已经得到X、Y方向位移随时间变化的数据 x_displacement, y_displacement
time = 0:0.001:1; % 假设的时间向量
% 计算X方向位移的FFT
X_fft = fft(x_displacement);
freq = (0:length(X_fft)-1)*(1/(time(2)-time(1)))/length(X_fft); % 频率向量
% 绘制X方向位移时域图
figure;
subplot(2,1,1);
plot(time, x_displacement);
xlabel('Time (s)');
ylabel('X - Displacement (m)');
title('X - Direction Displacement Time - Domain Plot');
% 绘制X方向位移FFT结果
subplot(2,1,2);
plot(freq(1:length(X_fft)/2), 2/length(X_fft)*abs(X_fft(1:length(X_fft)/2)));
xlabel('Frequency (Hz)');
ylabel('Magnitude');
title('X - Direction Displacement FFT Plot');这段代码展示了如何对假设的X方向位移数据进行FFT计算并绘制时域图和频域图。通过时域图我们能看到位移随时间的波动情况,而频域图则能清晰展示出主要的振动频率成分。
基于matlab的齿轮动力学仿真。 该模型考虑动态啮合角和动态间隙非线性的影响,将扭矩直接作用于齿轮,并定义已知的系统参数:齿数、模数、转动惯量、压力角、转速等,输出齿轮X、Y方向的时变位移及FFT结果,综合变形时域图及相图和庞加莱图。 根据是时变啮合刚度和阻尼得到动态啮合力。 程序已调通,可直接运行。
至于变形时域图、相图和庞加莱图,它们各自从不同角度反映系统的动力学特性。变形时域图直观呈现变形随时间的变化;相图能展示系统状态变量之间的关系,反映系统的运动轨迹;庞加莱图则能帮助我们分析系统的周期性和混沌特性。不过具体绘制这些图会涉及更复杂的算法和数据处理,这里就不详细展开啦。
整个程序已经调通,可以直接运行。这样一个基于Matlab的齿轮动力学仿真模型,从参数定义到扭矩施加,再到动态啮合力计算以及结果输出分析,涵盖了齿轮动力学仿真的主要方面。希望通过这篇博文,能让大家对基于Matlab的齿轮动力学仿真有更清晰的认识,也欢迎一起交流探讨更多细节。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献44条内容
已为社区贡献44条内容

所有评论(0)