Matlab Simulink代码生成全流程解析
matlab simulink代码生成 包括:环境配置,参数与信号配置,函数名配置,数据管理,代码生成,以及代码优化等 文档63页

在工程领域,利用Matlab Simulink进行代码生成是一项极为实用的技能,它能将Simulink模型高效转化为可在不同平台运行的代码。下面就来详细讲讲这一过程涉及的各个关键环节。
一、环境配置
首先,确保你的Matlab和Simulink版本支持代码生成功能。一般来说,较新的版本功能更为强大且稳定。打开Matlab后,需要确认是否安装了必要的代码生成工具包,比如Embedded Coder。若未安装,可通过Matlab的Add - Ons功能进行安装。
假设你已经成功安装了Embedded Coder,接下来设置目标硬件。例如,如果要生成用于ARM微控制器的代码,需要在Simulink模型的Configuration Parameters中,选择相应的目标硬件平台,如ARM Cortex - M系列。代码示例如下(虽然这里不是直接代码,但是在配置过程中的关键设置):
- 打开Simulink模型,点击“Model Configuration Parameters”。
- 在弹出窗口中,选择“Hardware Implementation”,在“Board”下拉菜单中选择你的ARM开发板型号。
这样就初步完成了环境的基础配置,确保Matlab知道要将代码生成到何种硬件平台上。
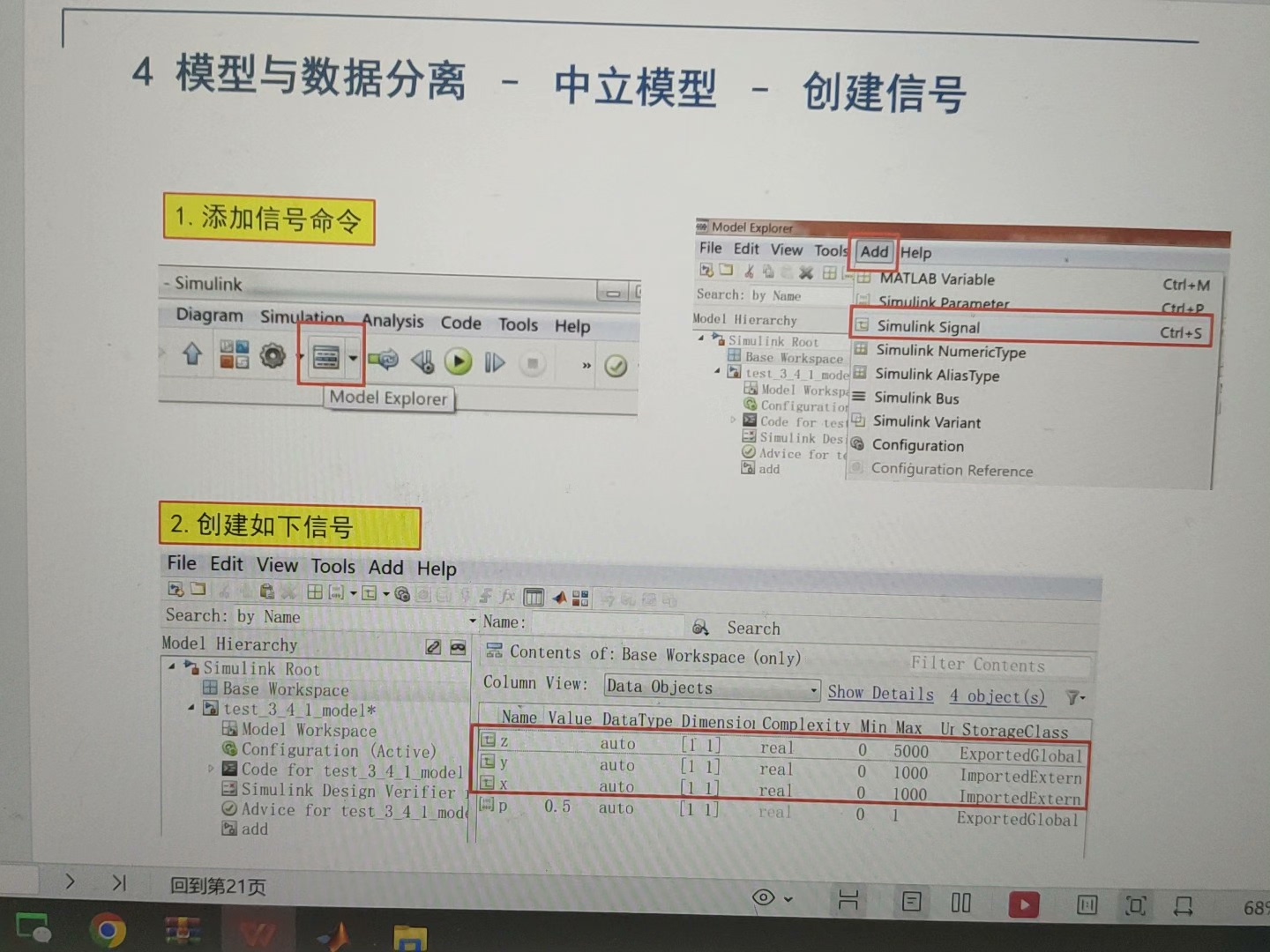
二、参数与信号配置
在Simulink模型中,参数和信号的合理配置至关重要。参数是模型中的常量,而信号则是连接各个模块的数据载体。
以一个简单的PID控制模型为例,假设我们有一个PID控制器模块。在模块参数设置中,需要明确比例系数(Kp)、积分系数(Ki)和微分系数(Kd)。在Matlab代码层面,这些参数可能以结构体的形式存在,例如:
% 定义PID参数结构体
pidParams.Kp = 10;
pidParams.Ki = 0.1;
pidParams.Kd = 0.01;对于信号,比如输入信号(设定值)和反馈信号(实际值),要确保它们的数据类型和范围设置正确。在Simulink中,可以右键点击信号线,选择“Properties”来设置信号的数据类型,如“double”或者“single”。合理的数据类型选择可以在代码生成后优化内存使用和计算效率。例如,如果信号的值始终在0 - 1之间,且精度要求不高,使用“single”类型可以节省内存。
三、函数名配置
函数名在代码生成中起着标识和组织代码的作用。在Simulink模型中,可以为每个子系统或者模块自定义函数名。当生成代码时,这些函数名会直接体现在生成的代码中。
matlab simulink代码生成 包括:环境配置,参数与信号配置,函数名配置,数据管理,代码生成,以及代码优化等 文档63页
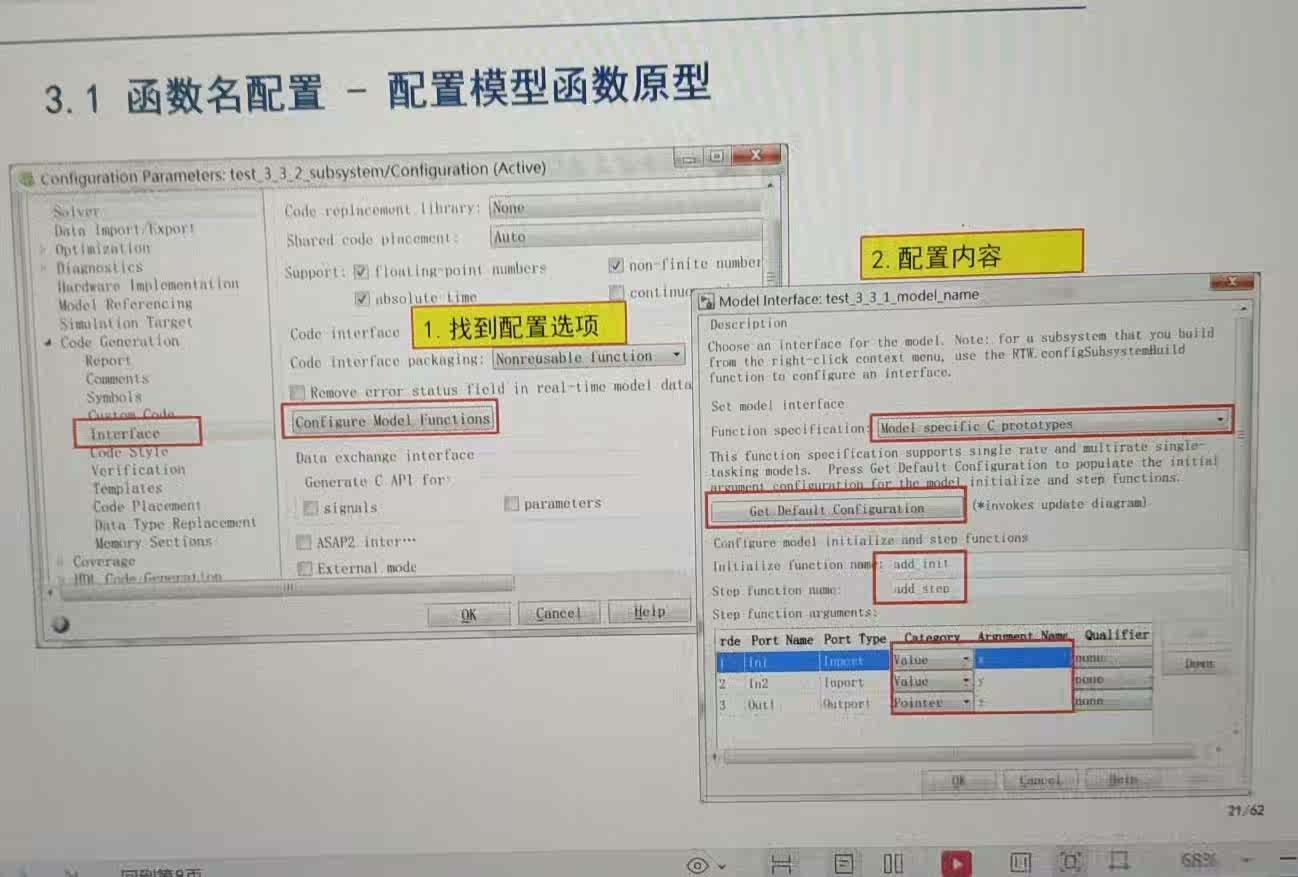
例如,我们有一个实现电机控制算法的子系统,为了使生成的代码更具可读性和可维护性,我们将其命名为“motorcontrolalgorithm”。在生成的C代码中,就会出现类似下面这样的函数定义:
void motor_control_algorithm(/* 相关输入输出参数 */) {
// 具体算法实现代码
}这样,无论是自己后续阅读代码,还是团队协作开发,都能快速明白该函数的功能。
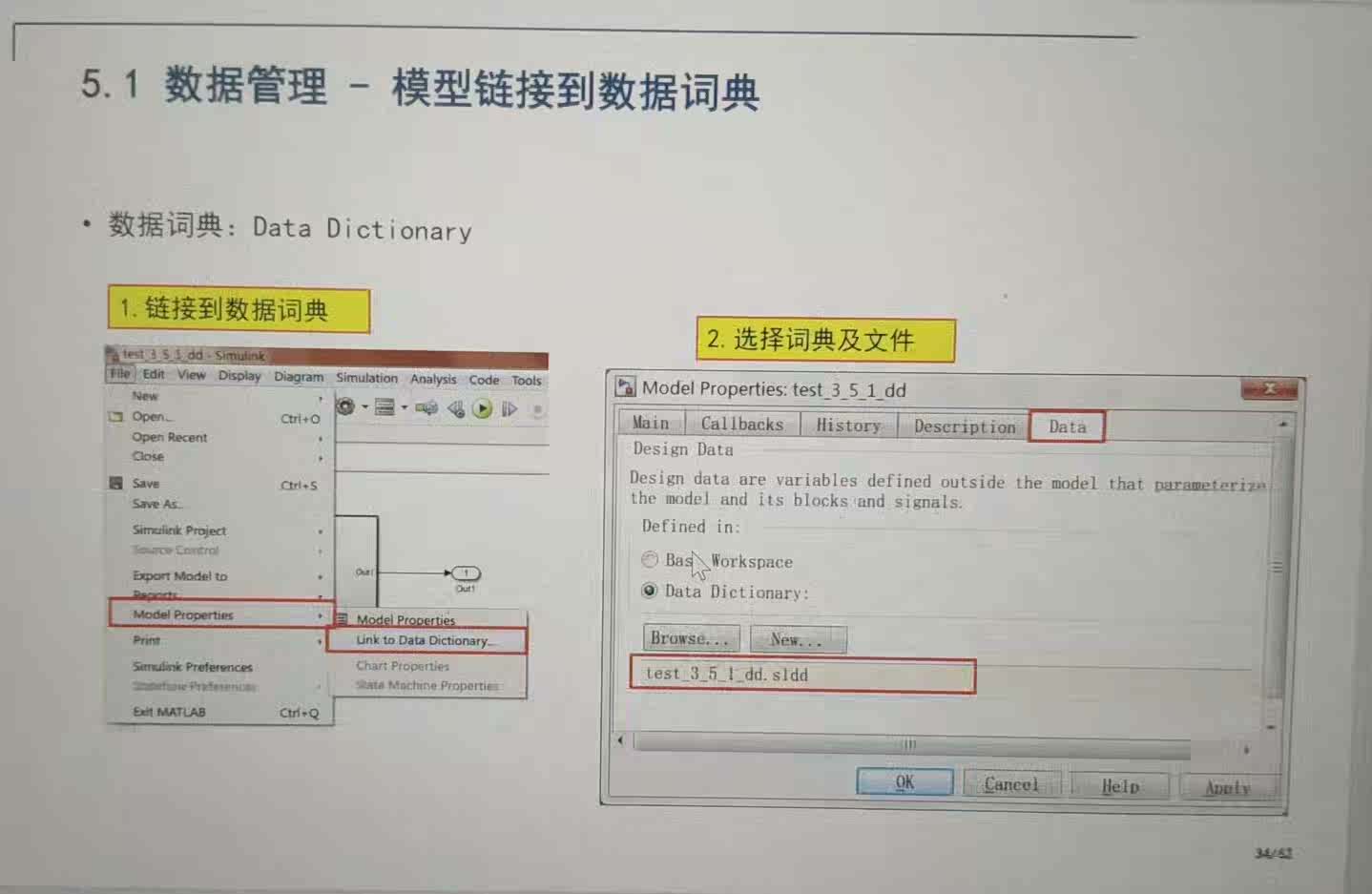
四、数据管理
数据管理在代码生成过程中涉及到变量的定义、存储和访问。在Simulink模型中,我们要考虑不同模块之间数据的交互以及数据的生命周期。
假设我们有一个数据采集模块和一个数据处理模块,数据采集模块采集到的数据需要传递给数据处理模块。在代码生成时,这可能涉及到定义全局变量或者通过函数参数传递数据。如果采用全局变量,在C代码中可以这样定义:
// 定义全局数据变量
float collectedData[100];
void data_collection_function() {
// 采集数据并存入全局变量
for (int i = 0; i < 100; i++) {
collectedData[i] = get_sensor_value(); // 假设get_sensor_value是获取传感器值的函数
}
}
void data_processing_function() {
// 从全局变量获取数据并处理
for (int i = 0; i < 100; i++) {
float processedValue = collectedData[i] * 2; // 简单的数据处理
// 进一步处理或存储processedValue
}
}然而,过多使用全局变量可能会导致代码的可读性和可维护性下降,因此在实际应用中需要权衡。也可以通过函数参数传递数据,使数据的传递更清晰和可控。
五、代码生成
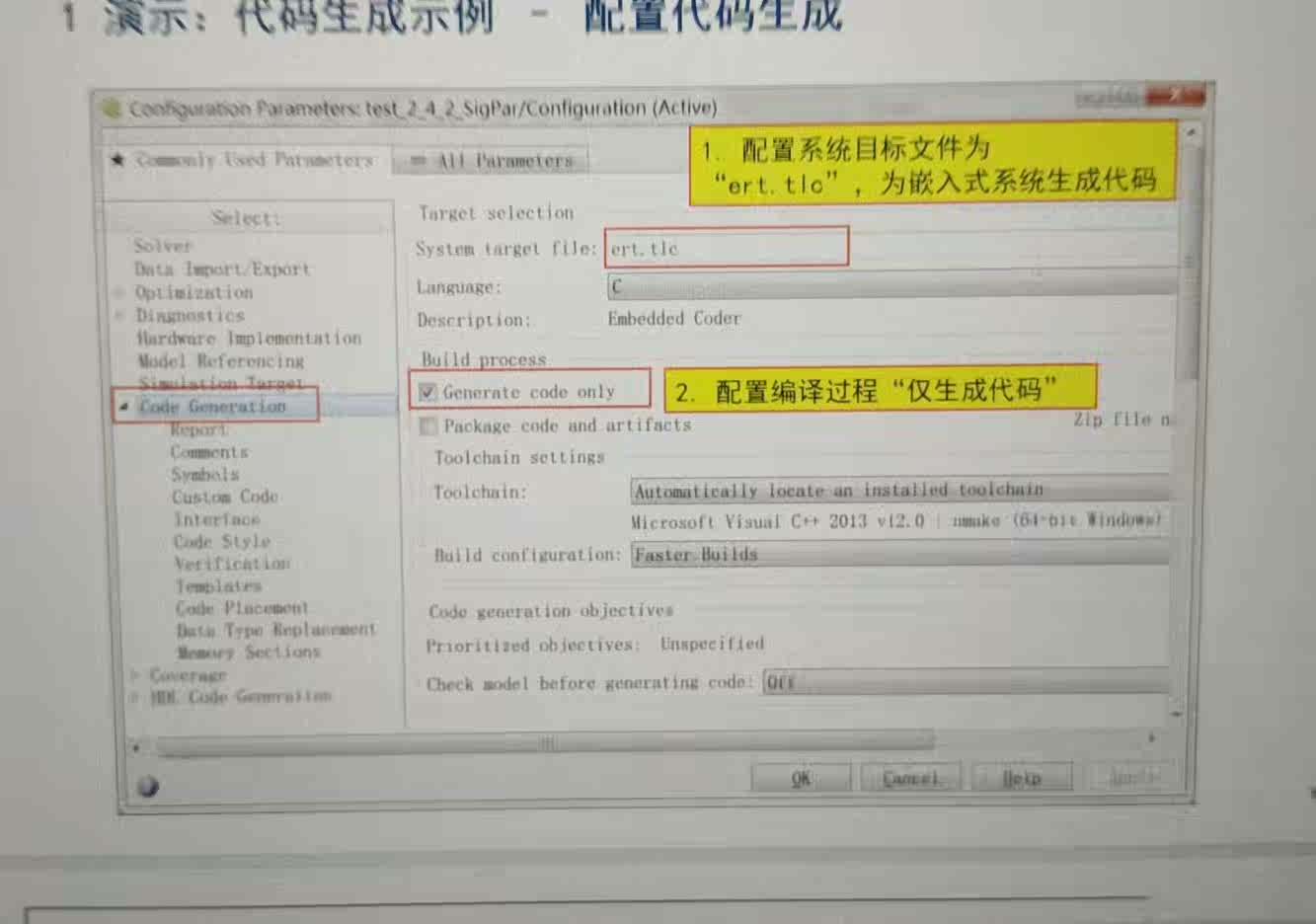
当完成上述配置后,就可以进行代码生成了。在Simulink模型界面,点击“Generate Code”按钮,Matlab会根据之前的配置生成相应的代码。
在生成代码之前,还可以在“Code Generation”选项卡中进行更详细的设置,比如选择生成代码的语言(C、C++等)、代码的优化等级等。以生成C代码为例,选择“C”语言后,Matlab会按照C语言的语法规则将Simulink模型转化为C代码文件,通常包括源文件(.c)和头文件(.h)。生成的代码会包含模型中各个模块对应的函数实现以及数据结构定义等。
六、代码优化
代码生成后,往往还需要进行优化以提高代码的性能。优化可以从多个方面入手。
- 算法优化:检查Simulink模型中的算法,看是否有更高效的实现方式。例如,在一些复杂的数学运算中,可以使用查找表代替复杂的计算,这样在生成代码后可以减少计算量,提高运行速度。
- 内存优化:分析生成代码中的变量使用情况,尽量减少不必要的内存占用。如前文提到的数据类型选择优化,以及合理使用局部变量和全局变量。
- 编译器优化:利用编译器提供的优化选项。在Matlab中生成代码时,可以在“Code Generation”选项卡中设置编译器优化等级,如设置为“-O3”(对于支持该选项的编译器),以启用最高级别的优化。
通过以上从环境配置到代码优化的一系列步骤,我们就能高效地利用Matlab Simulink进行代码生成,满足不同工程应用的需求。无论是开发嵌入式系统,还是进行算法原型验证后的产品化,这一流程都能为我们节省大量时间和精力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 5
5 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)