复现《基于 SMPC 的自动驾驶的故障检测和数据驱动的最佳自适应容错控制
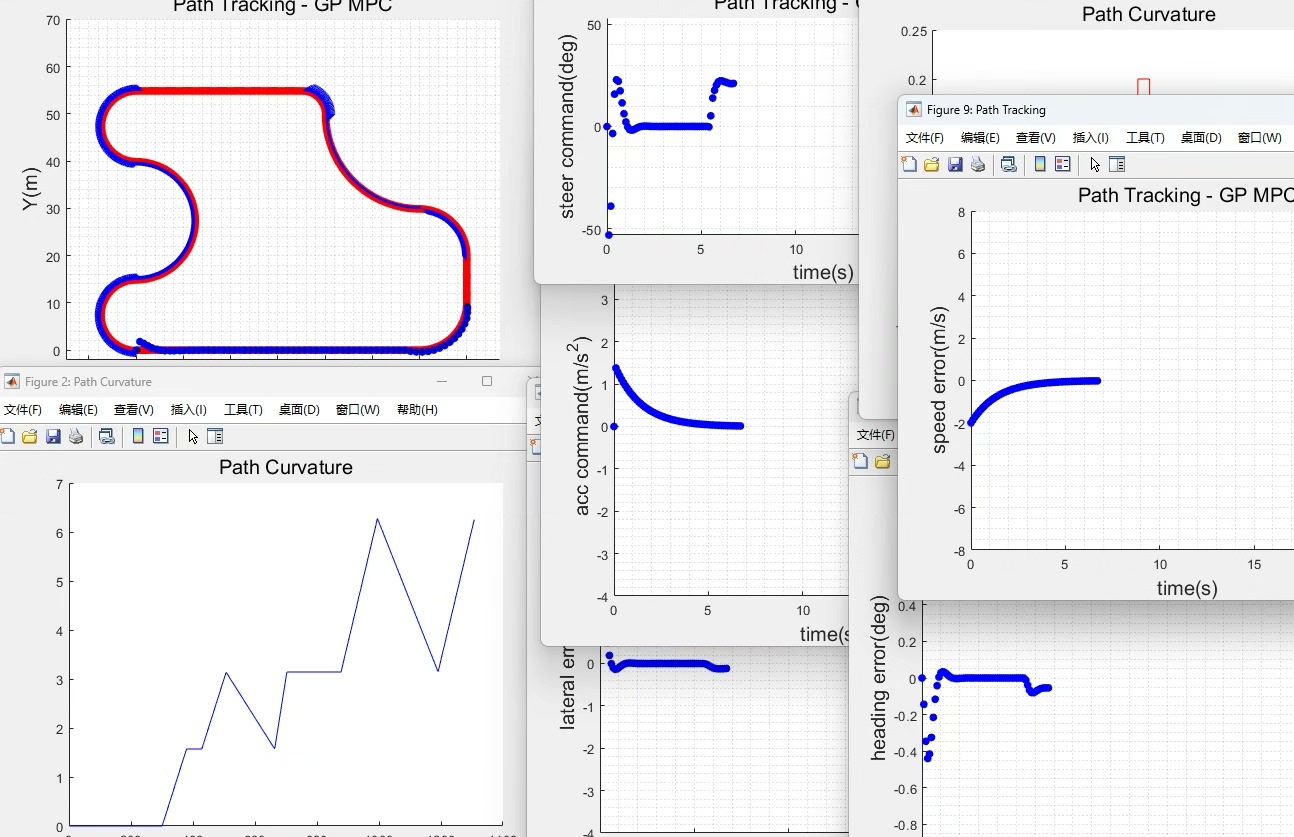
《基于 SMPC 的自动驾驶的故障检测和数据驱动的最佳自适应容错控制》复现paper MATLAB源码+数据 +文献 本文提出了一种新的数据驱动的、具有模型学习功能的自动驾驶汽车最优自适应容错控制方法,以实现在各种故障下的有效和安全驾驶。 执行器和传感器故障集成在一个统一的模型中,以描述车辆的动态行为。 仅使用车辆中有限的车载传感器在线估计车辆状态。 开发了一种使用改进的滑动创新序列方法的高效故障检测器,以确保准确的故障检测。 动态模型使用基于车辆运行数据的高斯过程在线调整,准确表示动态驾驶行为。 设计了一种基于学习的新型自适应容错控制方法,通过随机模型预测控制优化车辆运动,以实现在各种故障下的自主路径跟踪。 仿真实验验证了该方法在故障检测、模型在线学习和跨各种故障场景的精确路径跟踪方面的有效性
最近在研究自动驾驶相关技术时,发现了一篇超有意思的论文《基于 SMPC 的自动驾驶的故障检测和数据驱动的最佳自适应容错控制》。这篇论文提出了一系列相当创新的自动驾驶车辆控制方法,今天就来聊聊怎么复现这篇paper,还会附上MATLAB源码、数据以及相关文献哦。
创新点回顾
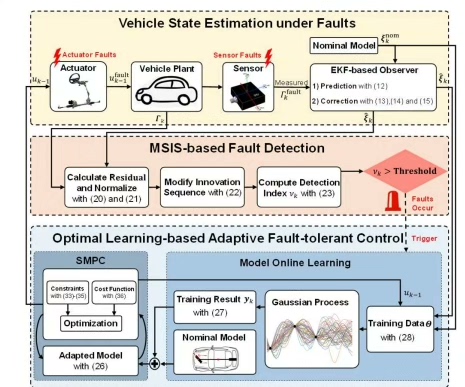
- 统一故障模型:论文把执行器和传感器故障集成在一个统一的模型里,用来描述车辆的动态行为。这就好比给车辆的故障情况做了一个大一统的“地图”,让我们能更全面地把握故障发生时车辆的动态。
- 有限传感器估计状态:仅依靠车辆中有限的车载传感器来在线估计车辆状态。想象一下,在不增加过多复杂设备的情况下,就能精准知道车辆当下的状态,是不是很厉害。
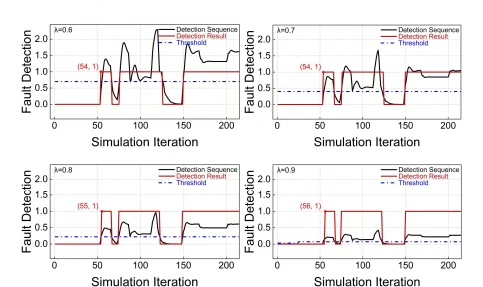
- 高效故障检测器:开发了一种基于改进的滑动创新序列方法的高效故障检测器,能够确保准确的故障检测。这就像给车辆安上了一个“智能故障眼睛”,时刻盯着车辆有没有问题。
- 动态模型在线调整:利用基于车辆运行数据的高斯过程在线调整动态模型,从而准确表示动态驾驶行为。就像车辆能自己学习经验,根据实际行驶情况不断优化自己的“行为模式”。
- 新型自适应容错控制:设计了基于学习的新型自适应容错控制方法,通过随机模型预测控制优化车辆运动,实现各种故障下的自主路径跟踪。简单说,就是车辆在出故障时也能自己找到路,继续安全行驶。
MATLAB源码复现
执行器和传感器故障统一模型
% 定义车辆动力学参数
m = 1500; % 车辆质量 (kg)
Iz = 2500; % 车辆绕z轴的转动惯量 (kg*m^2)
lf = 1.2; % 前轴到质心的距离 (m)
lr = 1.5; % 后轴到质心的距离 (m)
Cf = 15000; % 前轮侧偏刚度 (N/rad)
Cr = 15000; % 后轮侧偏刚度 (N/rad)
% 定义故障参数
% 假设执行器故障影响转向输入,这里简单设置一个故障系数
actuator_fault = 0.8;
% 假设传感器故障影响速度测量,设置测量误差
sensor_error = 5;
% 车辆动力学模型
function dx = vehicle_dynamics(t, x, u)
vx = x(1);
vy = x(2);
r = x(3);
delta = u(1); % 转向角输入
% 考虑执行器故障,对转向角进行调整
delta_faulty = actuator_fault * delta;
beta = atan(vy/vx);
Fyf = -Cf * (delta_faulty - beta - lf * r / vx);
Fyr = -Cr * (-beta + lr * r / vx);
dx1 = -Fyf * sin(delta_faulty) / m + vx * r;
dx2 = (Fyf * cos(delta_faulty) + Fyr) / m - vx * r;
dx3 = (lf * Fyf * cos(delta_faulty) - lr * Fyr) / Iz;
dx = [dx1; dx2; dx3];
end在这段代码里,我们先定义了车辆的基本动力学参数,然后设置了执行器和传感器故障相关的参数。在车辆动力学模型函数里,我们考虑了执行器故障对转向角的影响,对输入的转向角进行了调整。
基于改进滑动创新序列的故障检测
% 初始化故障检测参数
window_size = 10; % 滑动窗口大小
innovation_threshold = 0.5; % 创新序列阈值
innovation_sequence = zeros(window_size, 1);
fault_detected = false;
% 模拟获取传感器数据(这里简单生成一些随机数据代表实际传感器测量)
for k = 1:100
% 假设这里是通过传感器测量得到的车辆状态
measured_state = [randn; randn; randn];
% 这里省略了实际模型预测状态的计算,假设预测状态为predicted_state
predicted_state = [randn; randn; randn];
innovation = measured_state - predicted_state;
% 处理传感器故障,给测量值加上误差
innovation_with_error = innovation + sensor_error;
innovation_sequence = [innovation_with_error(1); innovation_sequence(1:end - 1)];
avg_innovation = mean(innovation_sequence);
if abs(avg_innovation) > innovation_threshold
fault_detected = true;
disp('故障检测到!');
end
end这段代码里,我们先初始化了故障检测需要的参数,比如滑动窗口大小和创新序列阈值。然后在模拟获取传感器数据的循环里,计算测量状态和预测状态的创新值,并考虑了传感器故障给创新值加上误差。通过滑动窗口计算平均创新值,当超过阈值时就认为检测到了故障。
基于高斯过程的动态模型在线调整
% 假设已经有一些车辆运行数据
% 这里简单生成一些随机数据代表运行数据
data_x = randn(100, 3); % 输入数据,每一行代表一个状态向量
data_y = randn(100, 1); % 输出数据,比如车辆的某种响应
% 定义高斯过程模型
gp = fitrgp(data_x, data_y);
% 预测新的状态
new_state = [randn; randn; randn];
predicted_response = predict(gp, new_state');这里我们简单模拟了有车辆运行数据的情况,然后用这些数据训练了一个高斯过程模型gp。之后就可以用这个模型对新的车辆状态进行预测,实现动态模型的在线调整。
数据准备
复现过程中,数据是非常关键的。理想情况下,我们需要实际的自动驾驶车辆运行数据,包括各种传感器的测量值,如车速、转向角、加速度等,以及对应在不同工况下车辆的实际响应。这些数据可以从真实的车辆测试、模拟器或者公开的自动驾驶数据集获取。如果使用公开数据集,要注意数据的格式和适用场景,可能需要进行一些预处理,比如数据清洗、特征提取等,让数据符合我们复现代码的输入要求。
相关文献
当然,要更好地理解和复现这篇论文,相关的文献阅读必不可少。除了本文引用的参考文献外,可以进一步查找一些关于自动驾驶故障检测、自适应容错控制、高斯过程建模以及滑动创新序列方法的经典文献。比如在IEEE Xplore、ScienceDirect等数据库里搜索相关关键词,能找到很多有价值的资料,帮助我们深入理解每个方法背后的原理,从而更好地完成复现工作。
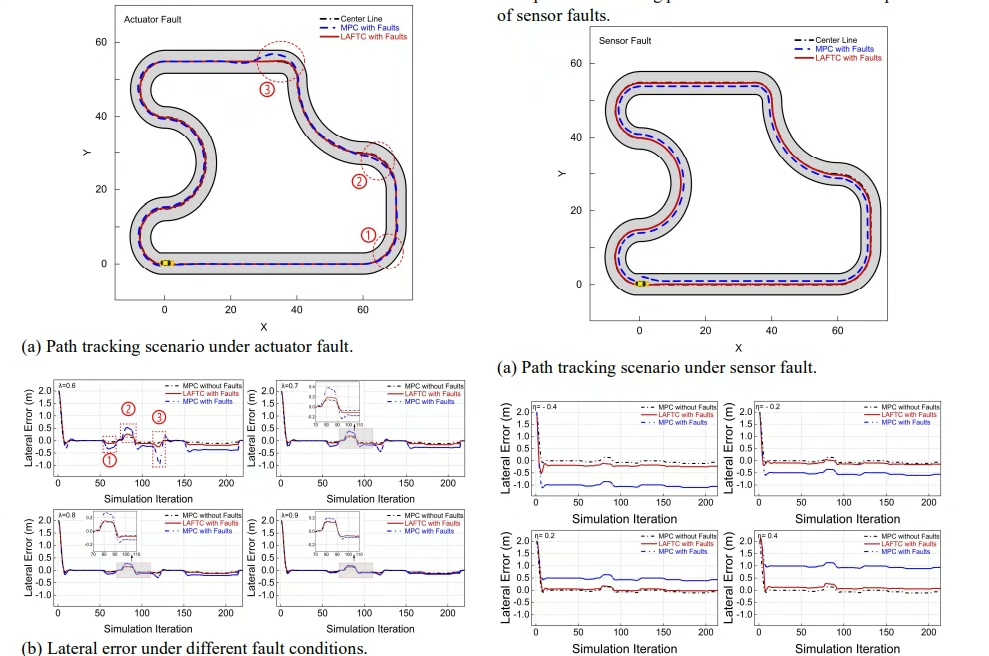
《基于 SMPC 的自动驾驶的故障检测和数据驱动的最佳自适应容错控制》复现paper MATLAB源码+数据 +文献 本文提出了一种新的数据驱动的、具有模型学习功能的自动驾驶汽车最优自适应容错控制方法,以实现在各种故障下的有效和安全驾驶。 执行器和传感器故障集成在一个统一的模型中,以描述车辆的动态行为。 仅使用车辆中有限的车载传感器在线估计车辆状态。 开发了一种使用改进的滑动创新序列方法的高效故障检测器,以确保准确的故障检测。 动态模型使用基于车辆运行数据的高斯过程在线调整,准确表示动态驾驶行为。 设计了一种基于学习的新型自适应容错控制方法,通过随机模型预测控制优化车辆运动,以实现在各种故障下的自主路径跟踪。 仿真实验验证了该方法在故障检测、模型在线学习和跨各种故障场景的精确路径跟踪方面的有效性
通过上面这些步骤,我们就可以尝试复现《基于 SMPC 的自动驾驶的故障检测和数据驱动的最佳自适应容错控制》这篇论文啦。在复现过程中肯定会遇到各种问题,大家一起探讨呀,说不定能碰撞出更多有意思的想法。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)