永磁同步电机无感控制——基于反电势观测器 + 锁相环
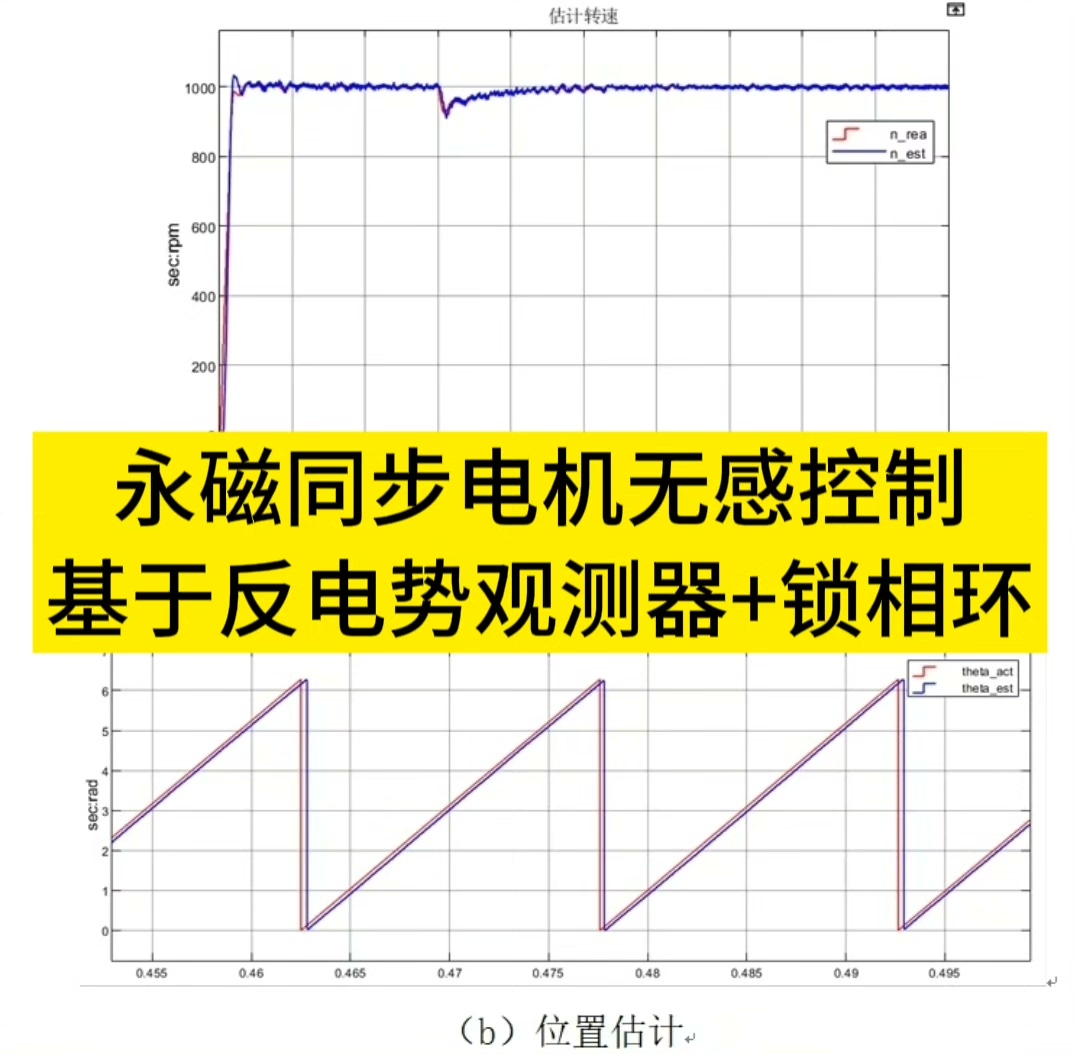
永磁同步电机无感控制--基于反电势观测器+锁相环 在全速域范围内,一般的永磁同步电机无感控制要分为低速区域和高速区域两个部分。 原因在于常规的方法是利用模型建立反电动势观测器来求解转子位置信息,但其只适合在中高速区域。 本商品介绍一种back-EMF+PLL的方法。 反电势观测器+锁相环PLL的永磁电机无感控制只适合于中、高速区域(一般额定转速的10%以上的速度范围)。 因为在低速区域的信噪比低、反电势与转速成正比,加上采样精度等问题,反电势的估计误差大导致无法正确地计算出转速和位置信息。 基于反电动势的无感控制技术显示出明显的优势,主要体现在如下方面:首先是算法复杂度低,容易理解和实现;其次是具有较高的动态响应速率,能够在短时间内做出响应;最后就是成熟度较高,适用性强,应用场景较多。 3、
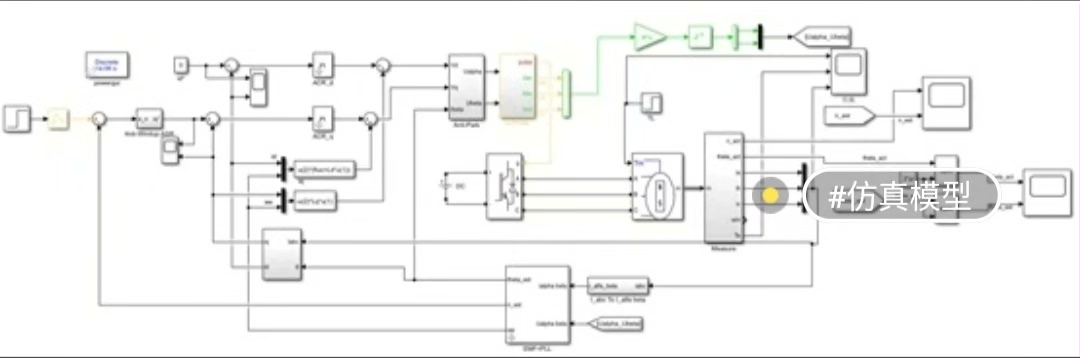
永磁同步电机无感控制在全速域范围内一般分为低速区域和高速区域两部分。常规方法通过建立反电动势观测器求解转子位置信息,但这只适用于中高速区域。今天来介绍一种back - EMF + PLL的方法。
一、适用区域及低速区域问题
反电势观测器 + 锁相环PLL的永磁电机无感控制只适用于中、高速区域(一般额定转速的10%以上的速度范围)。在低速区域,存在诸多问题。比如信噪比低,反电势又与转速成正比,再加上采样精度等问题,使得反电势的估计误差极大,进而无法正确计算出转速和位置信息。
二、基于反电动势无感控制技术的优势
基于反电动势的无感控制技术优势明显。
(一)算法复杂度低
它的算法复杂度低,这意味着什么呢?简单来说,就是容易理解和实现。不像一些复杂的算法,需要花费大量时间去研究和调试。例如在代码实现中,相关的逻辑和步骤不会特别繁琐。
# 简单示意代码
def emf_based_control():
# 这里就是基于反电动势的控制核心逻辑
# 比如一些简单的计算和判断步骤
result = some_calculation()
if result > threshold:
# 执行相应操作
do_something()
return result在这段代码中,emfbasedcontrol函数就是基于反电动势控制的一个简单示意。它内部的逻辑相对简洁,没有过多复杂的嵌套和高深的数学运算,对于开发者来说很容易理解和维护,这就是算法复杂度低带来的好处。
(二)动态响应速率高
具有较高的动态响应速率,能够在短时间内做出响应。这在实际应用中非常关键,比如当电机遇到突然的负载变化或者指令变化时,它能迅速调整运行状态。想象一下,如果电机不能快速响应,可能会导致设备运行不稳定,甚至出现故障。
(三)成熟度高、适用性强
最后就是成熟度较高,适用性强,应用场景较多。这说明它经过了大量的实践检验,在很多不同的场合都能发挥作用。无论是工业生产中的各种自动化设备,还是一些对电机性能要求较高的科研仪器等,都可能会用到这种基于反电动势的无感控制技术。
永磁同步电机无感控制--基于反电势观测器+锁相环 在全速域范围内,一般的永磁同步电机无感控制要分为低速区域和高速区域两个部分。 原因在于常规的方法是利用模型建立反电动势观测器来求解转子位置信息,但其只适合在中高速区域。 本商品介绍一种back-EMF+PLL的方法。 反电势观测器+锁相环PLL的永磁电机无感控制只适合于中、高速区域(一般额定转速的10%以上的速度范围)。 因为在低速区域的信噪比低、反电势与转速成正比,加上采样精度等问题,反电势的估计误差大导致无法正确地计算出转速和位置信息。 基于反电动势的无感控制技术显示出明显的优势,主要体现在如下方面:首先是算法复杂度低,容易理解和实现;其次是具有较高的动态响应速率,能够在短时间内做出响应;最后就是成熟度较高,适用性强,应用场景较多。 3、
总之,永磁同步电机无感控制中的基于反电势观测器 + 锁相环的方法,虽然有其适用范围限制,但在中高速区域有着独特的优势,值得我们深入研究和应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)