基于卡尔曼滤波优化的单容水箱液位MPC控制:探索更优的液位控制方案
基于卡尔曼滤波优化的单容水箱液位MPC控制; MPC模型预测控制;卡尔曼滤波;单容水箱; 液位控制;与单纯的MPC控制作对比,系统状态估计更加准确,减小传感器估计误差,液位控制效果更好,具有较强的抵抗噪声干扰能力; 包括Matlab/Simulink仿真模型(采用2级S函数)、单容水箱数学模型推导、卡尔曼滤波原理解析、模型预测控制原理解析、MPC控制水箱液位模型、卡尔曼滤波优化模型预测控制液位模型、相关论文8册、相关图书3册、自做PPT文档43页,自做模型
在自动化控制领域,液位控制一直是一个重要的研究方向,单容水箱液位控制就是其中典型的应用场景。今天咱们就来唠唠基于卡尔曼滤波优化的单容水箱液位MPC控制,看看它到底有啥厉害之处。
一、单容水箱数学模型推导
首先得搞清楚单容水箱的数学模型,这是后续控制算法设计的基础。假设水箱横截面积为 $A$,流入流量为 $q{in}$,流出流量为 $q{out}$,液位高度为 $h$。根据物料守恒,可得:
$A\frac{dh}{dt} = q{in} - q{out}$
通常,流出流量 $q{out}$ 和液位高度 $h$ 满足关系 $q{out} = \alpha\sqrt{h}$,其中 $\alpha$ 是与管道阻力等因素有关的系数。这样,我们就初步建立起了单容水箱的动态数学模型。
二、MPC模型预测控制原理解析
MPC,也就是模型预测控制,它的核心思想很有意思。MPC通过预测系统未来的行为,然后根据预测结果在线优化控制输入,使得系统输出尽可能地跟踪期望的参考轨迹。
在Matlab里,实现一个简单的MPC控制水箱液位的代码思路大概是这样:
% 假设已经有了单容水箱的离散化模型 A, B, C, D
% 预测时域
Np = 10;
% 控制时域
Nu = 5;
% 权重矩阵
Q = eye(Np);
R = eye(Nu);
% 构建MPC控制器
mpcController = mpc(A, B, C, D, Np, Nu, Q, R);这里,我们先定义了预测时域 Np 和控制时域 Nu,以及权重矩阵 Q 和 R。权重矩阵 Q 用于惩罚预测输出与参考轨迹之间的偏差,R 则用于惩罚控制输入的变化幅度。通过 mpc 函数构建了MPC控制器。
三、卡尔曼滤波原理解析
卡尔曼滤波主要用于从带有噪声的观测数据中估计系统的真实状态。它是一个递归的过程,分为预测和更新两个步骤。
预测步骤:
$\hat{x}{k|k - 1} = A\hat{x}{k - 1|k - 1} + Bu_{k - 1}$
$P{k|k - 1} = AP{k - 1|k - 1}A^T + Q$
基于卡尔曼滤波优化的单容水箱液位MPC控制; MPC模型预测控制;卡尔曼滤波;单容水箱; 液位控制;与单纯的MPC控制作对比,系统状态估计更加准确,减小传感器估计误差,液位控制效果更好,具有较强的抵抗噪声干扰能力; 包括Matlab/Simulink仿真模型(采用2级S函数)、单容水箱数学模型推导、卡尔曼滤波原理解析、模型预测控制原理解析、MPC控制水箱液位模型、卡尔曼滤波优化模型预测控制液位模型、相关论文8册、相关图书3册、自做PPT文档43页,自做模型
更新步骤:
$Kk = P{k|k - 1}C^T(CP_{k|k - 1}C^T + R)^{-1}$
$\hat{x}{k|k} = \hat{x}{k|k - 1} + Kk(zk - C\hat{x}_{k|k - 1})$
$P{k|k} = (I - KkC)P_{k|k - 1}$
其中,$\hat{x}{k|k - 1}$ 是基于上一时刻估计的当前时刻状态预测值,$P{k|k - 1}$ 是预测误差协方差,$Kk$ 是卡尔曼增益,$\hat{x}{k|k}$ 是更新后的状态估计值,$P_{k|k}$ 是更新后的误差协方差。
用Matlab实现简单卡尔曼滤波代码示例:
% 假设已经有了系统状态转移矩阵 A,观测矩阵 C,过程噪声协方差 Q,观测噪声协方差 R
% 初始化状态估计和误差协方差
x_hat = zeros(size(A, 1), 1);
P = eye(size(A, 1));
% 假设 z 是观测值,u 是控制输入
for k = 1:length(z)
% 预测
x_hat_minus = A * x_hat + B * u(k);
P_minus = A * P * A' + Q;
% 更新
K = P_minus * C' / (C * P_minus * C' + R);
x_hat = x_hat_minus + K * (z(k) - C * x_hat_minus);
P = (eye(size(A, 1)) - K * C) * P_minus;
end这段代码按照卡尔曼滤波的预测和更新步骤,对系统状态进行估计。
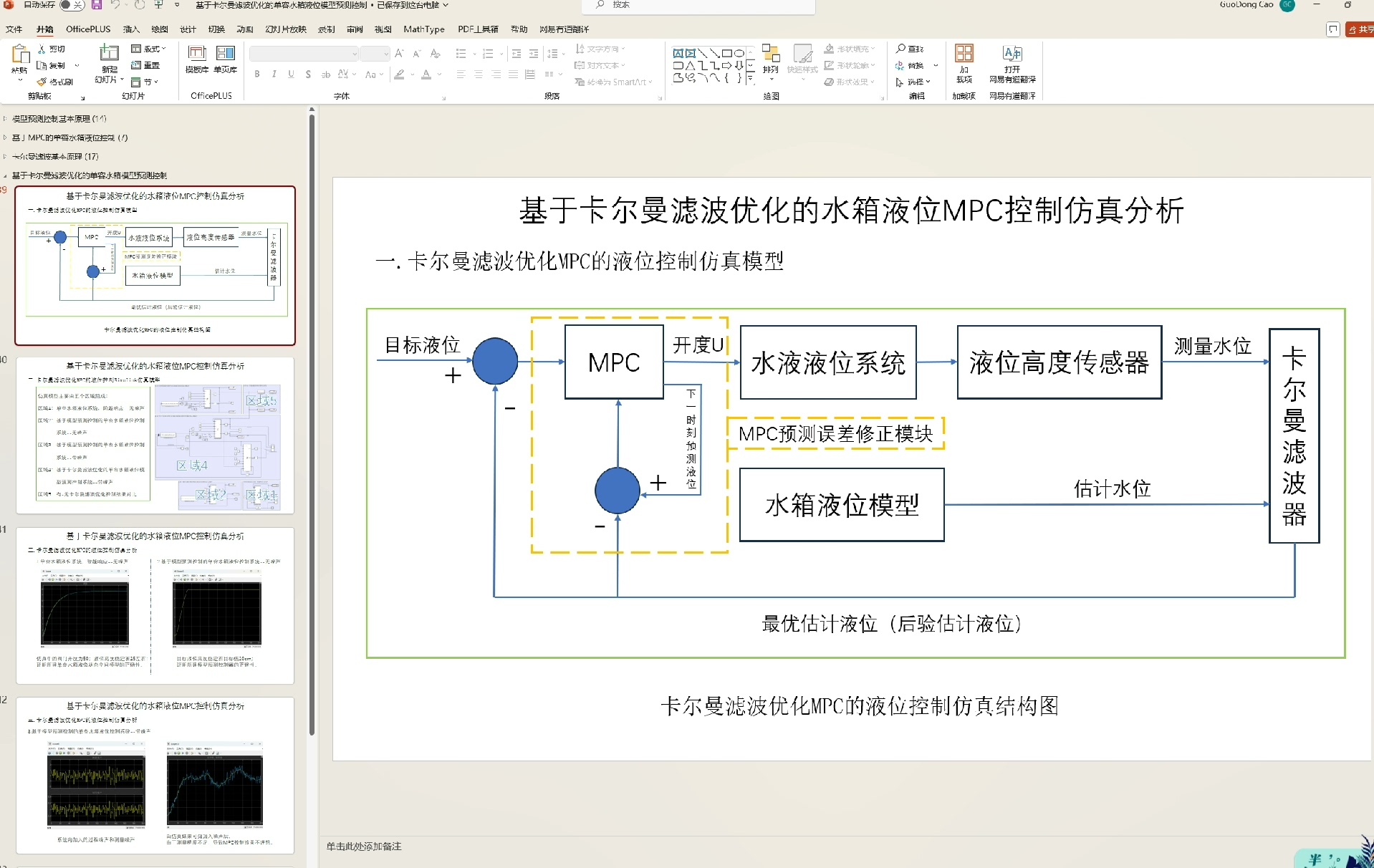
四、卡尔曼滤波优化模型预测控制液位模型
把卡尔曼滤波和MPC结合起来,就能让系统状态估计更加准确。因为单纯的MPC控制依赖传感器测量值来进行控制决策,但传感器测量往往存在误差。卡尔曼滤波可以减小这种传感器估计误差,让MPC得到更准确的状态信息,从而提升液位控制效果,增强系统抵抗噪声干扰的能力。
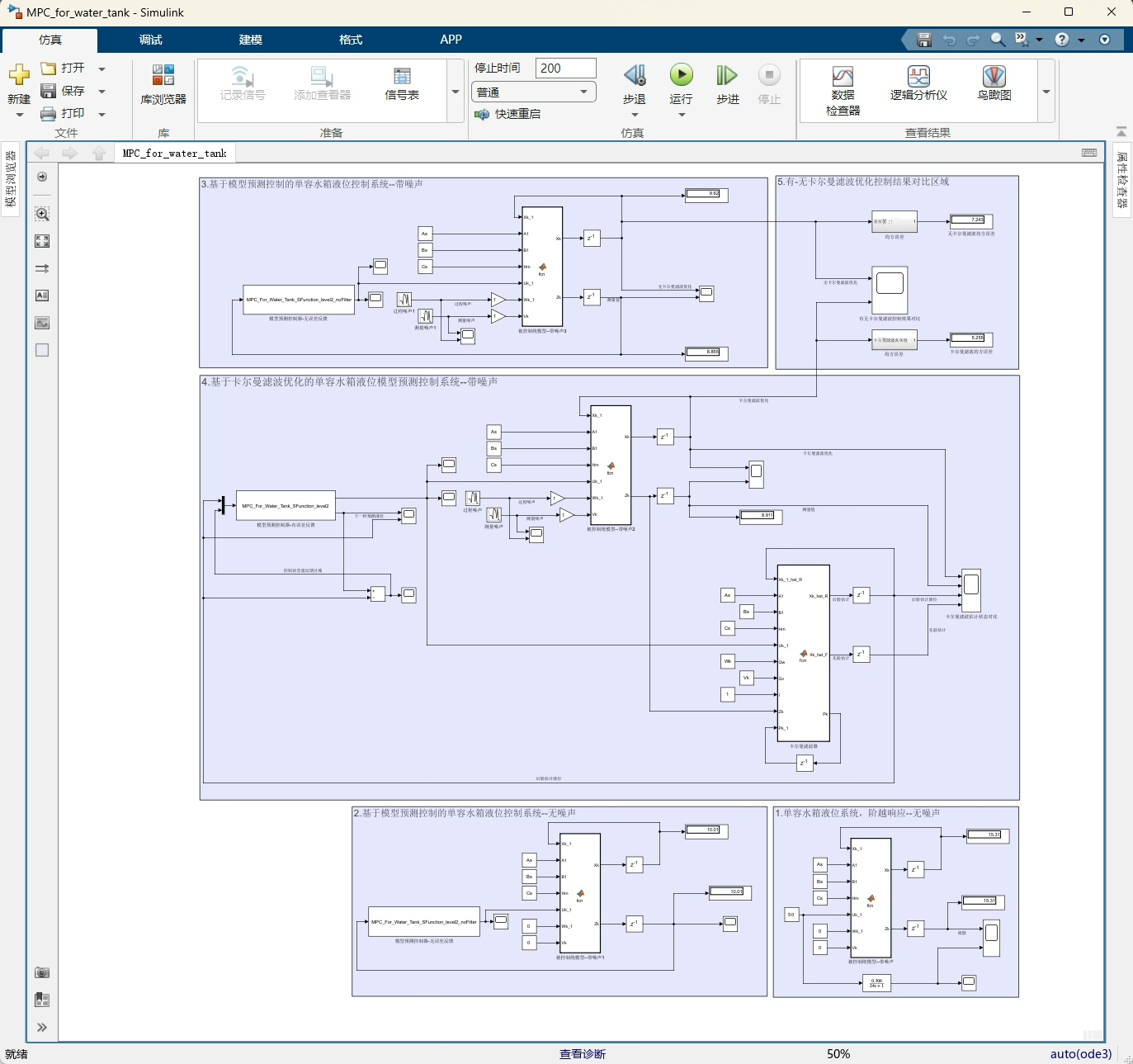
在Simulink里搭建基于卡尔曼滤波优化的MPC控制单容水箱液位模型时,采用2级S函数来实现相关算法逻辑。比如在S函数里,我们可以将卡尔曼滤波的估计状态作为MPC的输入状态,代码实现如下(伪代码示例):
function [sys, x0, str, ts] = LevelControlSFunction(t, x, u, flag)
switch flag
case 0
% 初始化
sys = [状态个数; 输出个数; 输入个数; 离散状态个数];
x0 = 初始状态值;
str = [];
ts = [采样时间; 0];
case 1
% 计算卡尔曼滤波估计状态
x_hat = KalmanFilter(u(1), u(2), x);
% 基于估计状态计算MPC控制输入
u_mpc = MPCController(x_hat);
sys = u_mpc;
case 3
% 输出
sys = [液位测量值; 其他输出];
otherwise
sys = [];
end
end这个S函数在不同的 flag 下执行不同的操作,初始化、基于卡尔曼滤波和MPC计算控制输入以及输出相关值。
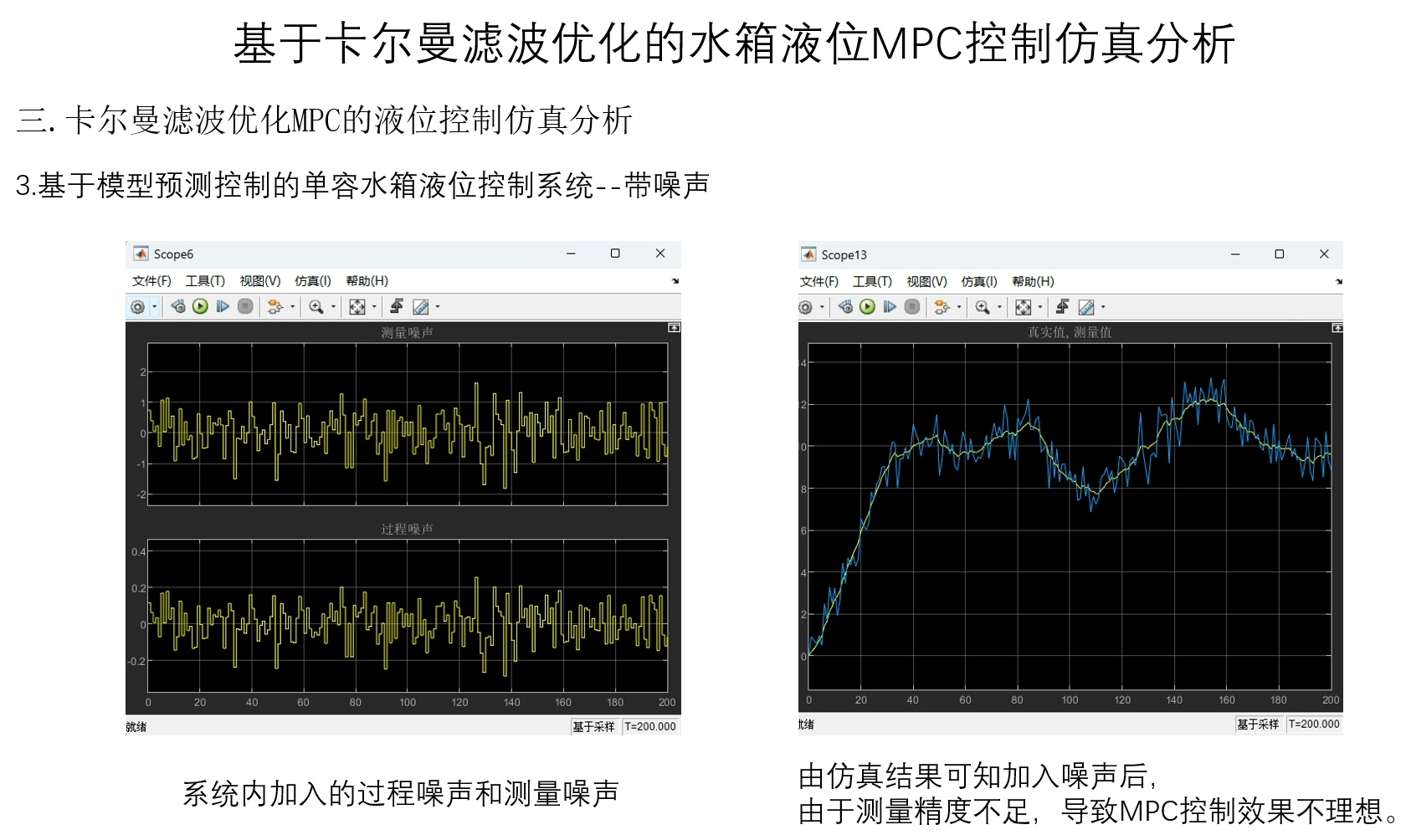
五、仿真与对比
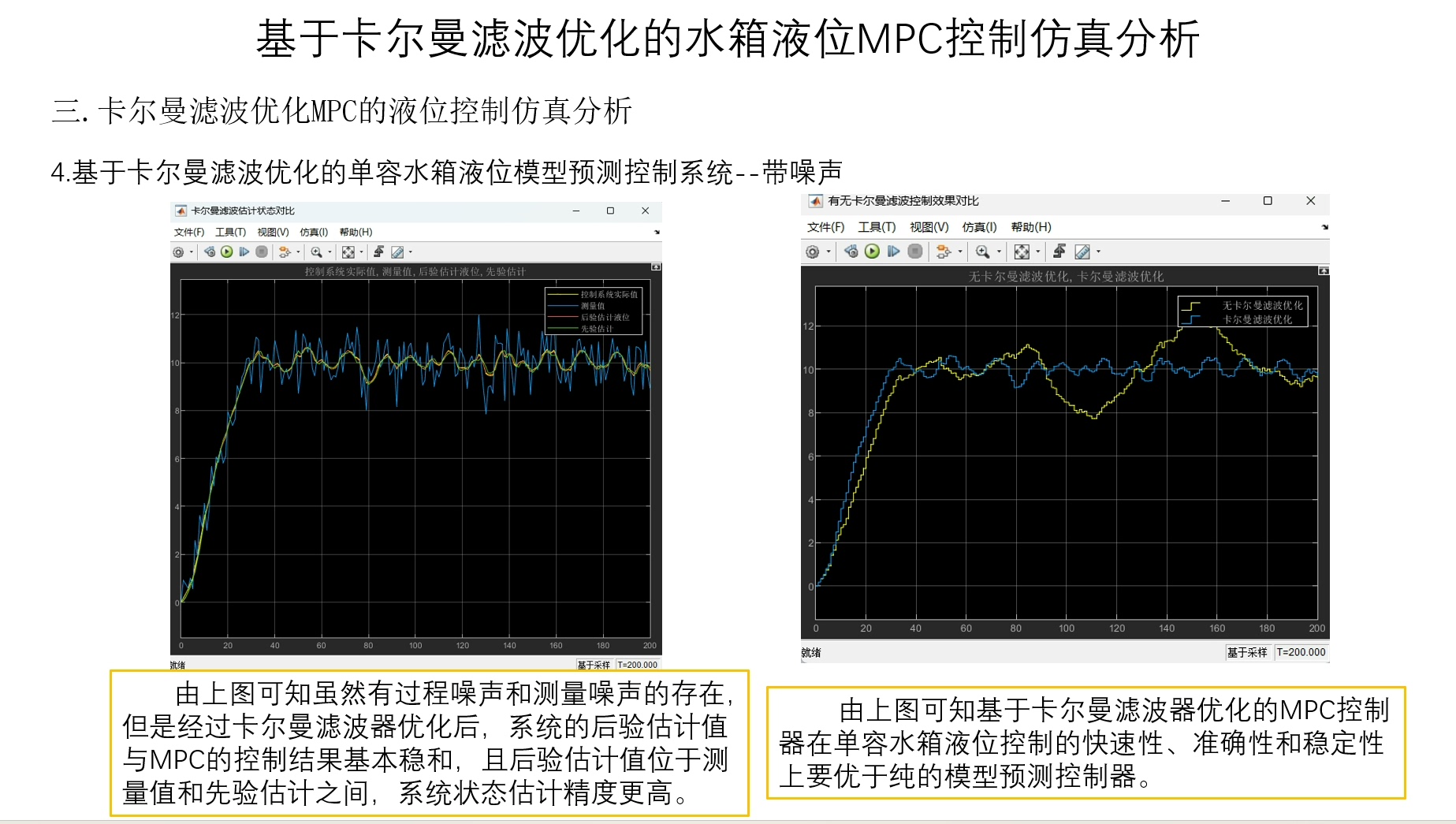
通过Matlab/Simulink搭建单纯MPC控制和基于卡尔曼滤波优化的MPC控制单容水箱液位的仿真模型。从仿真结果可以明显看出,基于卡尔曼滤波优化的MPC控制,液位能够更快速、稳定地跟踪设定值,在面对噪声干扰时,波动更小。
综上所述,基于卡尔曼滤波优化的单容水箱液位MPC控制确实展现出了更好的性能。如果大家对这方面感兴趣,可以进一步研究相关的8册论文、3册图书,以及我自制的43页PPT和模型,相信会有更多收获。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)