基于定子电流误差的dq轴反电动势观测器仿真模型解析
基于定子电流误差的dq轴反电动势观测器仿真模型 公开资料显示NXP, Renesas等大厂均使用该反电动势模型,国内某厂家早期版本也使用该反电动势观测器,可见该观测器的独到之处; 知乎上有大佬对该观测器点评承认其特殊之处,该类观测器是闭环类观测器(输出影响输入),行业有使用该类观测器渐多的趋势。 仿真特点: 1. 反电动势观测器部分使用NXP方案,结构简单,参数易调节; 2. 锁相环部分经过特殊处理,任意初始角度都可以闭环直接启动; 3. 可施加一定的初始负载,带载启动能力优秀; 4. 模型严格功能分区,除了观测器还包括MTPA、弱磁、电流环和速度环参数整定等部分,可使电机运行到额定状态 5. 包含基本公式注释,标幺值系统,离散模型 6. 通用表贴和内嵌式电机; 文件包括: 1. 仿真模型文件(2020b版本,可转低版本) 2. Renesas, NXP应用笔记各一篇
最近研究了一个超厉害的基于定子电流误差的dq轴反电动势观测器仿真模型,感觉必须来和大家分享一下😎
公开资料显示NXP、Renesas等大厂都在用这个反电动势模型,国内某厂家早期版本也用过它,这足以证明它的独到之处👍。在知乎上也有大佬对该观测器进行点评,承认了它的特殊之处。而且这类观测器属于闭环类观测器(输出影响输入),现在行业里使用它的趋势是越来越多啦👏。
下面重点说说它的仿真特点:
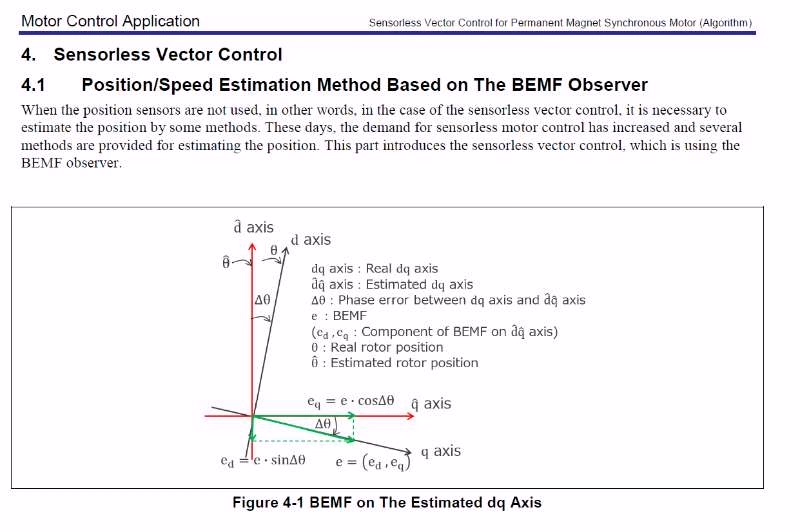
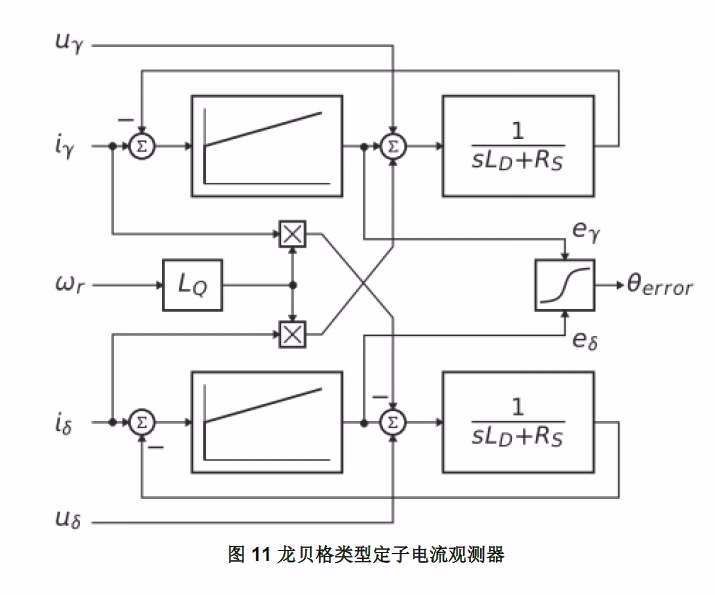
1. 反电动势观测器部分
它采用了NXP方案,结构简单得很,参数调节起来也非常容易。就好比搭积木一样,轻松就能搞定😜。
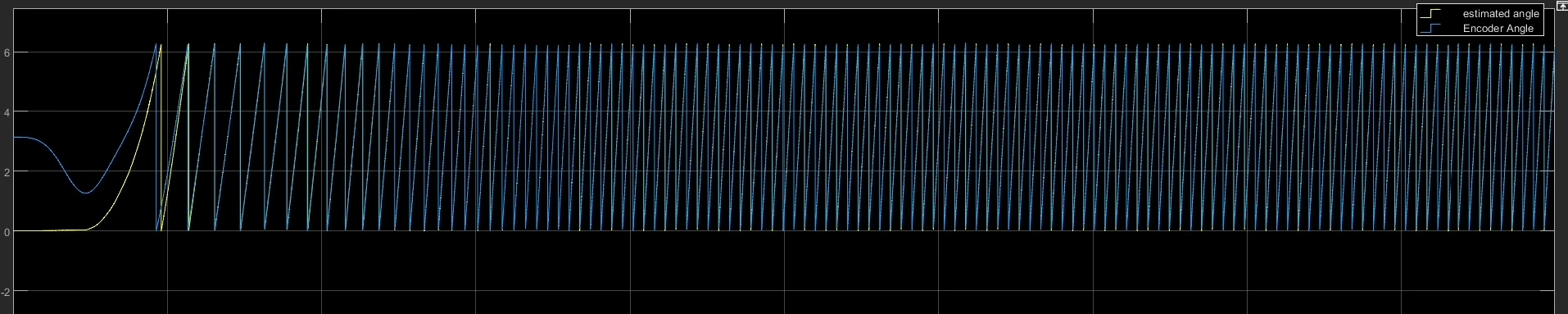
2. 锁相环部分
经过特殊处理后,不管初始角度是多少,都能闭环直接启动。这就好比一辆车,不管从哪个方向出发,都能快速跑起来🚗。这里的代码实现也很巧妙,通过一些算法来精准地锁定相位。
% 简单示意锁相环相关代码片段
theta = 0; % 初始角度
while true
% 这里通过一系列计算更新theta
theta = theta + some_function(theta);
if theta满足闭环启动条件
break;
end
end这段代码就是模拟锁相环的角度更新过程,不断调整角度,直到满足启动条件。
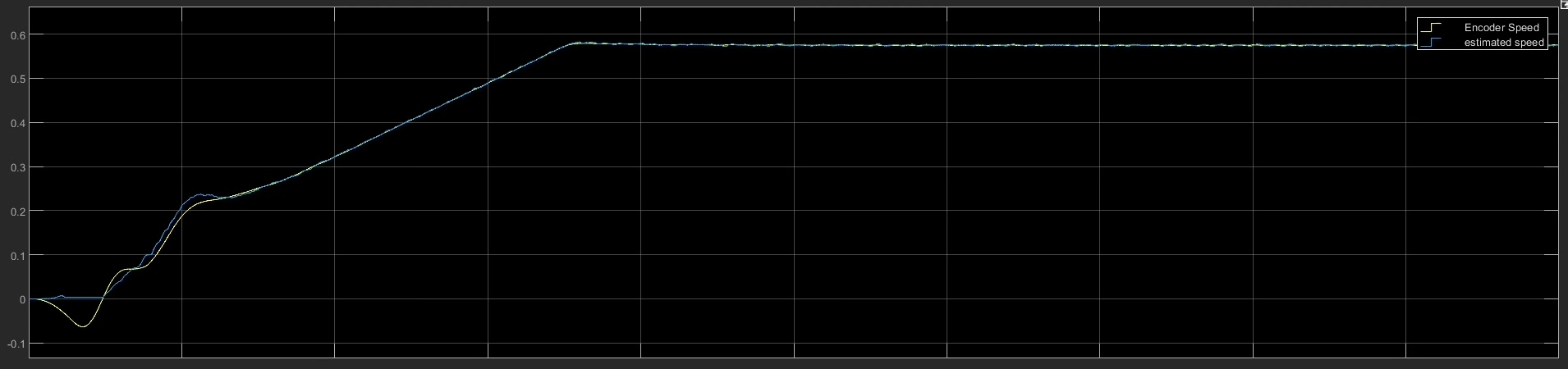
3. 带载启动能力
它可施加一定的初始负载,带载启动能力相当优秀。就像一个大力士,背着重重的东西也能轻松起跑🏃♂️。
4. 模型功能分区
模型严格进行了功能分区,除了观测器,还包括MTPA、弱磁、电流环和速度环参数整定等部分,能让电机运行到额定状态。这就好比一个精密的机器,每个部件都各司其职,协同工作,让电机发挥出最佳性能💪。
5. 包含丰富内容
模型包含基本公式注释,标幺值系统,离散模型。这对于我们理解和研究模型非常有帮助,就像给我们配备了一本详细的说明书📖。
6. 适用多种电机
通用表贴和内嵌式电机都适用,简直太实用啦!不管是哪种类型的电机,它都能完美适配🤝。
基于定子电流误差的dq轴反电动势观测器仿真模型 公开资料显示NXP, Renesas等大厂均使用该反电动势模型,国内某厂家早期版本也使用该反电动势观测器,可见该观测器的独到之处; 知乎上有大佬对该观测器点评承认其特殊之处,该类观测器是闭环类观测器(输出影响输入),行业有使用该类观测器渐多的趋势。 仿真特点: 1. 反电动势观测器部分使用NXP方案,结构简单,参数易调节; 2. 锁相环部分经过特殊处理,任意初始角度都可以闭环直接启动; 3. 可施加一定的初始负载,带载启动能力优秀; 4. 模型严格功能分区,除了观测器还包括MTPA、弱磁、电流环和速度环参数整定等部分,可使电机运行到额定状态 5. 包含基本公式注释,标幺值系统,离散模型 6. 通用表贴和内嵌式电机; 文件包括: 1. 仿真模型文件(2020b版本,可转低版本) 2. Renesas, NXP应用笔记各一篇
文件方面也很齐全,有仿真模型文件(2020b版本,还可转低版本),还有Renesas、NXP应用笔记各一篇,为我们深入研究提供了充足的资料📄。
总之,这个基于定子电流误差的dq轴反电动势观测器仿真模型真的是非常棒,在电机控制领域有着很大的应用潜力。强烈推荐给各位对电机研究感兴趣的小伙伴们🧐!
#电机控制 #反电动势观测器 #仿真模型

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)