【无人机动态路径规划】基于粒子群 改进粒子群灰狼算法结合动态窗口的无人机实际山地模型威胁路径规划和动态避碰附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、无人机路径规划面临的挑战
无人机在实际山地环境中执行任务时,路径规划面临诸多挑战。山地地形复杂,存在高山、峡谷等各种地形地貌,同时可能分布着诸如雷达站、防空导弹阵地等威胁源。此外,环境中还可能出现动态障碍物,如其他飞行的无人机、鸟类等。传统的路径规划算法难以应对这种复杂多变的环境,因此需要结合多种智能算法和动态窗口技术来实现高效的路径规划与动态避碰。
二、粒子群算法(PSO)
2.1 基本原理
2.2 在路径规划中的应用
在无人机路径规划中,将无人机的飞行路径编码为粒子的位置。每个粒子的位置向量可能包含一系列空间坐标点,代表无人机飞行的路径节点。粒子群算法通过不断迭代更新粒子的位置,使得粒子逐渐向最优路径靠近,即找到一条避开山地、威胁源和障碍物,同时满足任务要求(如最短路径、最小威胁等)的飞行路径。
3.2 在路径规划中的应用
在无人机路径规划中,将无人机的路径看作是灰狼的位置。灰狼优化算法通过模拟灰狼的狩猎行为,在解空间中搜索最优路径。与粒子群算法类似,它不断调整灰狼的位置,以找到避开山地、威胁源等障碍的最佳飞行路径。
四、改进粒子群灰狼算法
4.1 改进思路
为了克服粒子群算法和灰狼优化算法各自的缺点,发挥两者的优势,提出改进粒子群灰狼算法。例如,粒子群算法收敛速度较快,但容易陷入局部最优;灰狼优化算法全局搜索能力较强,但后期收敛速度较慢。改进算法结合两者的优点,在前期利用灰狼优化算法的全局搜索能力,快速找到较好的搜索区域;在后期利用粒子群算法的快速收敛特性,加速收敛到全局最优解。
五、动态窗口技术
5.1 基本原理
动态窗口技术主要用于处理动态避碰问题。无人机在飞行过程中,实时获取周围环境信息,确定一个以当前位置为中心的动态窗口。这个窗口的大小和形状会根据无人机的速度、转向能力以及环境中的障碍物分布动态调整。在动态窗口内,无人机生成一系列可能的运动指令(如速度、转向角度等),并对每个指令进行评估,选择一个最优的指令执行,以避开动态障碍物。
5.2 在无人机路径规划中的应用
在基于改进粒子群灰狼算法的路径规划基础上,结合动态窗口技术。当无人机飞行过程中检测到动态障碍物时,通过动态窗口技术实时调整飞行策略。例如,根据动态窗口内障碍物的位置和运动趋势,计算每个可能运动指令下无人机与障碍物的距离、碰撞风险等指标。然后,选择使碰撞风险最小且符合路径规划目标(如继续朝着目标点飞行)的运动指令,从而实现动态避碰,确保无人机在复杂的山地环境中安全飞行。
六、实际山地模型与威胁建模
6.1 实际山地模型构建
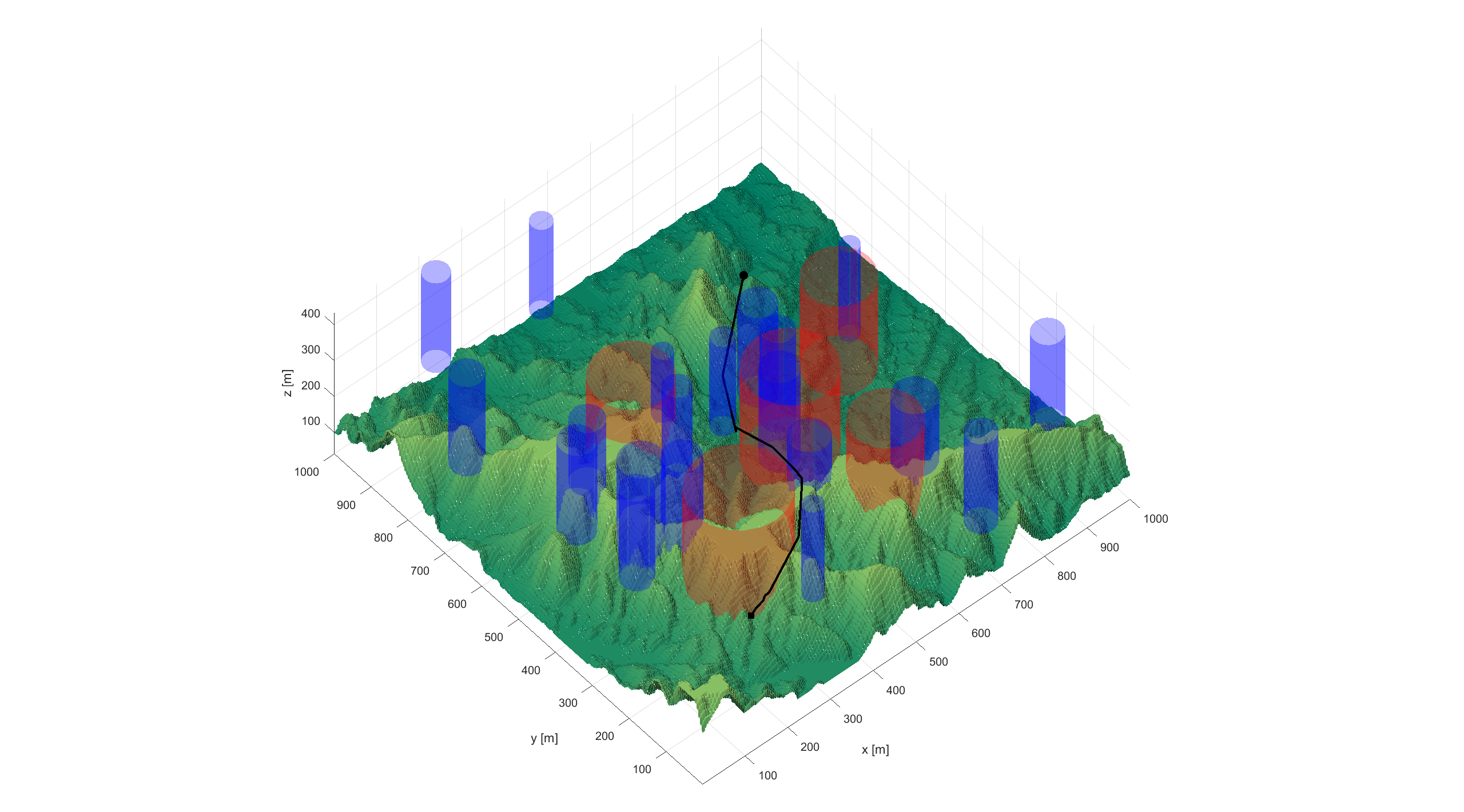
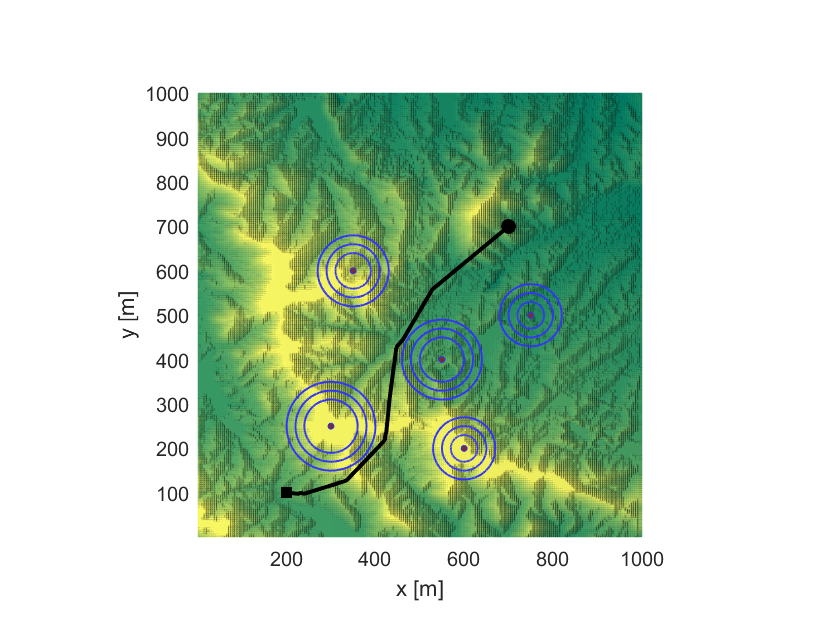
通过地理信息系统(GIS)数据、卫星图像或实地测量等方式获取山地的地形数据,构建实际山地模型。该模型可以表示为三维空间中的地形高度场,每个位置对应一个海拔高度值。在路径规划过程中,无人机的飞行路径需要避开山地的实际地形,确保飞行安全。
6.2 威胁建模
对山地环境中的威胁源进行建模,如雷达站、防空导弹阵地等。将威胁源表示为空间中的点或区域,并赋予每个威胁源一定的威胁值,该值反映了无人机接近该威胁源时所面临的风险程度。威胁值可以根据威胁源的类型、作用范围、探测能力等因素确定。在路径规划时,算法需要考虑避开高威胁区域,降低无人机执行任务的风险。
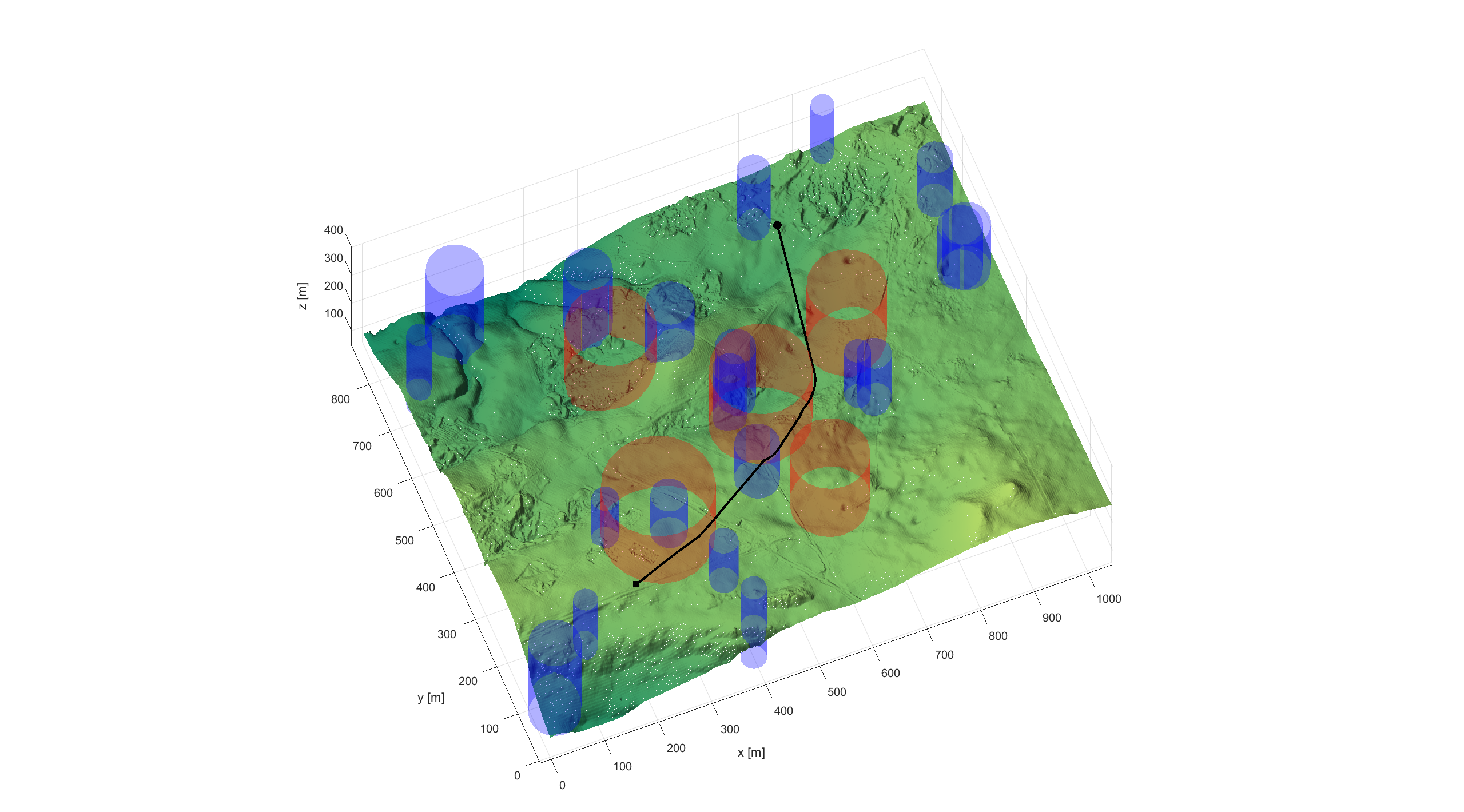
⛳️ 运行结果
📣 部分代码
function sol = convert(Position,model)
%CONVERT 此处显示有关此函数的摘要
% 此处显示详细说明
temp = Position;
sol.x(1) = model.start(1)+temp.x(1);
if sol.x(1) > model.xmax
sol.x(1) = model.xmax;
end
if sol.x(1) < model.xmin
sol.x(1) = model.xmin;
end
sol.y(1) = model.start(2)+temp.y(1);
if sol.y(1) > model.ymax
sol.y(1) = model.ymax;
end
if sol.y(1) < model.ymin
sol.y(1) = model.ymin;
end
sol.z(1) = model.start(3)+temp.z(1);
if sol.z(1) > model.zmax
sol.z(1) = model.zmax;
end
if sol.z(1) < model.zmin
sol.z(1) = model.zmin;
end
for i=2:model.n
sol.x(i)=sol.x(i-1)+temp.x(i);
if sol.x(i) > model.xmax
sol.x(i) = model.xmax;
end
if sol.x(i) < model.xmin
sol.x(i) = model.xmin;
end
sol.y(i)=sol.y(i-1)+temp.y(i);
if sol.y(i) > model.ymax
sol.y(i) = model.ymax;
end
if sol.y(i) < model.ymin
sol.y(i) = model.ymin;
end
sol.z(i)=sol.z(i-1)+temp.z(i);
if sol.z(i) > model.zmax
sol.z(i) = model.zmax;
end
if sol.z(i) < model.zmin
sol.z(i) = model.zmin;
end
end
end
🔗 参考文献
🍅往期回顾扫扫下方二维码

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献305条内容
已为社区贡献305条内容

所有评论(0)